本文主要是介绍ICESat-2学习笔记 2 :ICESat-2卫星搭载的ATLAS测高雷达,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Overview

我们先对ATLAS进行整体认识。ATLAS搭载于IceSat-2卫星上,主要部分如上图所示分为
- Laser 激光器:每秒发出10K个532nm的激光脉冲,532nm的光在人眼可见范围内,为绿光,之所以采用绿光(532nm)而不用近红外波段光是因为单光子探测器在532nm波段效率最高而在红外波段的响应很低(量子效率问题和技术成熟度问题,Si基探测器较成熟而InGaAs探测器技术不稳定)
- Diffractive Optical Element 衍射分光元件:利用光学衍射把激光器发出的一束光分成六束,接下来我们会详细扒一扒这六束光的结构
- Laser Reference System 激光对齐系统:光从出射到打在目标上再返回需要一段时间,而IceSat-2在这段时间一直在移动,激光对齐系统的作用就是让接收视场对齐地面的激光光斑,可以想象如果没有该对齐系统,将会出现激光打在一个位置,“眼睛”(接收视场)却因为IceSat-2的移动看到另一个位置上的现象
- Star Trackers 星敏感器:星敏感器就是一个相机,通过对空间中的星进行成像并和标准的星图进行比对来确定ATLAS的位姿信息,可以简单理解为一个位姿传感器
以上就是ATLAS主要的部件,另外我们还可以观察出ATLAS采用的是收发分置系统,即发射和接收光路不是共光路的,发射的激光从旁边一个小孔中射出而接收望远镜占据中间的大部分位置。另外一个有趣的地方是太阳能板在这里只设计了一个,和我们传统的卫星张开一双“翅膀”(两个太阳能板对称布置)的认知有不同。
下面我们将仔细扒一扒各部分结构。
Transmitter
该部分是激光发射部分
图片出自[1],作者是NASA该工程的参与者
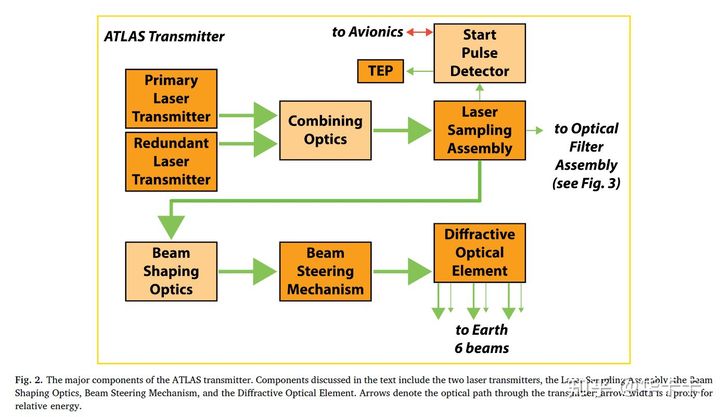
Primary Laser Transmitter是主激光器,Redundant Laser Transmitter是副激光器,上天系统的关键部件都是需要备份的,在主激光器失效的情况下副激光器将会启动。主副激光器通过Combining Optics进入到后续的同一光路中,Laser Sampling Assembly是激光采样组件,采一部分光(<1%)给Star Pulse Detector做测距的Start信号和监控激光中心频率的稳定性(to Optical Filter Assembly那部分),TEP给Star Pulse Detector做制冷;过了Laser Sampling Assembly后光路进入Beam Shaping Optics进行光束整形(这部分是用一些透镜或反射镜进行光束的准直扩束操作使光束的出射光斑和发散角符合设计要求,具体来说,设计要求在500km轨道高度上对地的光斑~17m),然后光路进入Beam Steering Mechanism进行光束的偏转,确保出射激光和接收视场角对齐(偏转控制量由前面提到的Laser Reference System提供,Beam Steering Mechanism也进行了硬件冗余设计以应对可能的机械失效),最后进入Diffractive Optical Element衍射分光为六束后出射到地面上,这六束光不是等强的,分为三强三弱,一强一弱为一对(pair),共三对(three pairs)。下面是这三对激光束打在地面上的分布示意图。
图片来自[2]
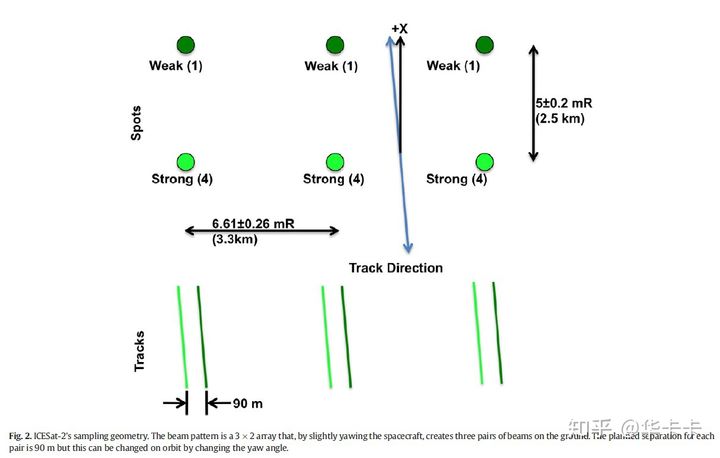
由文献[2]介绍,光束是按照3columns*2rows排列的,每一列(column)为一对(pair),对内两束光的夹角是5±0.2mR,在500km高对应2.5km距离,对间夹角为6.61±0.26mR,在500km高对应3.3km距离。注意看图上中间的坐标系,一对光束是在x方向上排列的,但是IceSat-2的运行方向(Track Direction)是和x有夹角的,因此一对光束会随着IceSat-2的运行留下两条轨迹,这两条轨迹的设计间隔是90m,但是可以通过改变IceSat-2的偏航角(yaw angle)改变。
Transmitter发射系统的核心部件是激光器,该激光器由Fibertek, Inc.制造,pulse width脉宽小于1.5ns,能量从0.2到1.2mJ可调,10KHz重频,MOPA模式,由Nd:YVO4产生1064nm激光后倍频到532nm。
通过Diffractive Optical Element后会损失约20%能量在高阶模式上,也就是说出射的六束光能量加起来只有入射到Diffractive Optical Element总量的80%。把整个光路的能量损失也考虑到后,在系统设计的激光器额定功率下,三束强光为175uJ±17uJ,三束弱光为45±5uJ,强弱比大约为4:1。强弱光束搭配的设计主要是考虑到两个方面:(1)激光器功率限制,不可能把六束光都设计成175uJ±17uJ的强光 (2)对于反射率高的目标,弱光45±5uJ已经可以提供足够的信噪比SNR。高反射目标时,强弱光都可以提供探测信息,低反射目标时,只有强光能提供有效的探测信息。该设计主要还是考虑到效率或者说性价比的问题,遇见低反射率目标,弱光不起作用,损失一半的数据点而已,但是可以极大降低激光器的负荷,是一个比较划算的trade-off。
另外还有一点值得注意,激光器重复频率10KHz,IceSat-2的轨道速度7km/s,轨道高度500km,算下来每个激光脉冲在along track(实在不知道中文怎么翻译了,就是沿着轨道对应的光斑轨迹)上的间隔只有大约0.7m,而激光光斑是17m,因此脉冲之间会有光斑重叠,这对提高along track resolution分辨率(横向分辨率或者叫空间分辨率)来讲是可以利用的。
Receiver
图片出自[1]
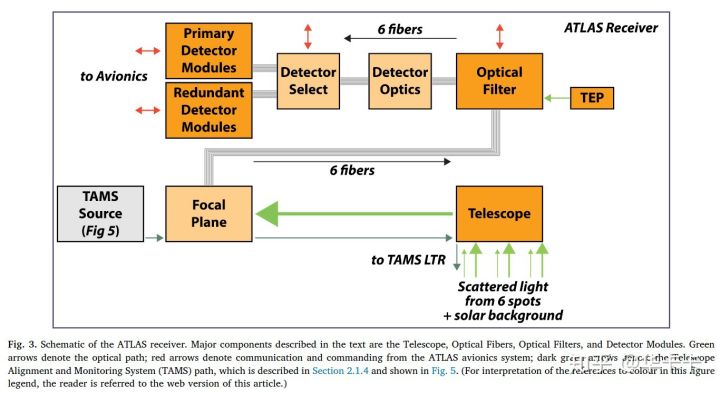
根据光路结构我们从右下往左上看。Telescope望远镜收集回波光子,该望远镜是一个直径0.8m的卡塞格林式望远镜[3],该望远镜包括镀膜在内都专门对绿光进行了优化。

图片来自NASA官网[3]
望远镜将回波光聚焦在Focal Plane焦平面上,在该焦平面上有六条fibers耦合进对应的回波光束。在500km轨道上,每个fiber的视场角(FOV)折算在地面的尺寸为45m(光斑为17m,视场为45m,视场完全覆盖光斑并有冗余)。Optical Filter包含pass band coarse filters(带通粗滤光片)和optical etalon filters(标准具滤光片)两部分分为粗滤波和精滤波。标准具滤光片和激光器的中心波长都是可以通过ATLAS的温度系统调节的,各自可调节range是30pm。实际工作中需要激光器的中心波长和标准具滤光片的中心波长匹配,这个匹配程度是由Wavelength Tracking Optical and Electronics Module (WTOM/WTEM)实现的。请翻看Transmitter部分,Laser Sampling Assembly采一部分光同时给Star Pulse Detector做测距的Start信号和Optical Filter Assembly去监控激光中心频率的稳定性。这部分去Optical Filter Assembly的光将会通过一个和标准具滤光片同样参数同样工况的滤光片filter,根据过滤光片后的光强情况来监控出射激光器中心波长和标准具滤光片中心波长的匹配程度。由于老化等原因会造成激光器中心波长漂移,标准具滤光片因此设计为每两年进行一次在线校正。
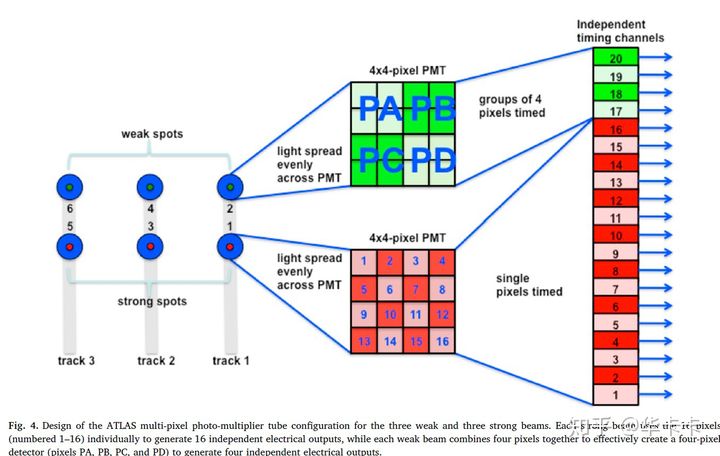
经过滤波片后回波光束到达探测器。同样,探测器也分为主副两个探测器,副探测器作为备份在主探测器失效时工作,通过六个可移动的反射镜(movable mirrors)进行主副探测器切换。探测器采用的是滨松Hamamatsu生产的16像素PMT阵列探测器,每束回波用一个探测器探测。强回波对应的探测器采用单像素输出(16路输出),弱回波对应的探测器采用4个像素合并为一个的方式(4路输出),如下图所示,该方式考虑到了弱回波信号分为16份以后可能强度不足从而只分为4份。
图片来自[1]
值得注意的是,虽然采用了4*4的阵列探测器,但是该系统的空间分辨能力不是由探测器提供的,而是靠IceSat-2推扫提供的。这16像素探测器只是简单的同步独立输出信号而已。
ATLAS的接收系统光学效率为40%,PMT的量子效率为15%,总的接收效率为6%。随着时间老化或者污染,接收系统的光学效率会持续下降,设计寿命内光学效率>35%。光学效率下降后可以通过调节PMT的偏置电压来提高量子效率从而使总接收效率稳定在6%。
ATLAS的两大关键部分,即发射和接收就介绍完了,下面做个总结。
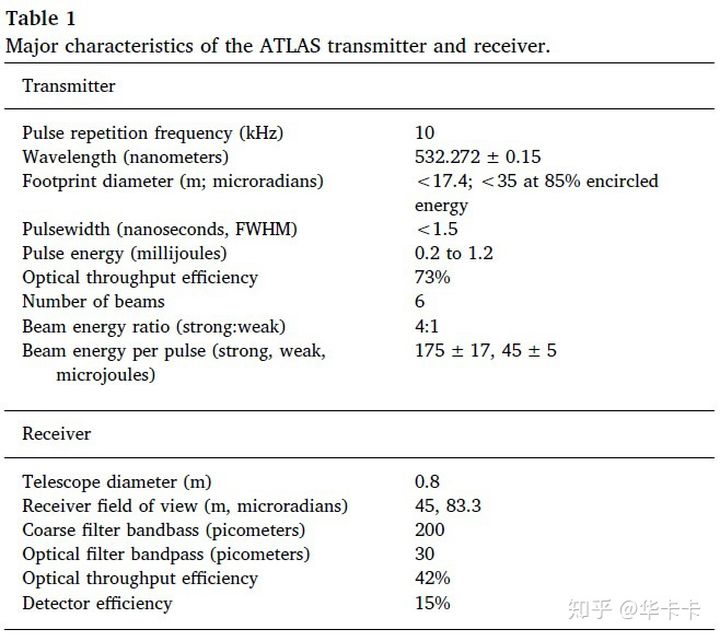
表格来自[1]
实验室搬砖不易,今天没有时间继续往下写了,下周再更新,下周会继续扒ATLAS的测时系统(Time of flight design)、光束对齐系统(Alignment and alignment monitoring)、偏置电压检测系统(Time of flight bias and bias monitoring)以及死时间(Dead time)效应。
欢迎大家和我进行交流讨论,也欢迎转载但请注明出处。
转载地址:Advanced Topographic Laser Altimeter System(ATLAS) - 知乎
参考
- ^Neumann T A, Martino A J, Markus T, et al. The Ice, Cloud, and Land Elevation Satellite–2 Mission: A global geolocated photon product derived from the advanced topographic laser altimeter system[J]. Remote sensing of environment, 2019, 233: 111325.
- ^Markus, Thorsten, et al. "The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): science requirements, concept, and implementation." Remote Sensing of Environment 190 (2017): 260-273.
- ^ICESat-2 Images | NASA
应很多网友建议,创建了一个ICESat-2的QQ技术交流群,大家可以申请入群共同学习:
群名称:ICESat-2学习交流群
群 号:737040432
一群已满,请加二群
群名称:ICESat-2学习交流群2
群 号:860504848
这篇关于ICESat-2学习笔记 2 :ICESat-2卫星搭载的ATLAS测高雷达的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









