本文主要是介绍Arduino - 28BYJ-48步进电机+ULN2003驱动模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
步进电机的操作倒是简单,只需要引用Stepper.h库文件操作即可。
关键点:
1、网上买的步进电机,很多接线顺序都不对。经过不懈努力查资料,终于找到了能用的接线方式:
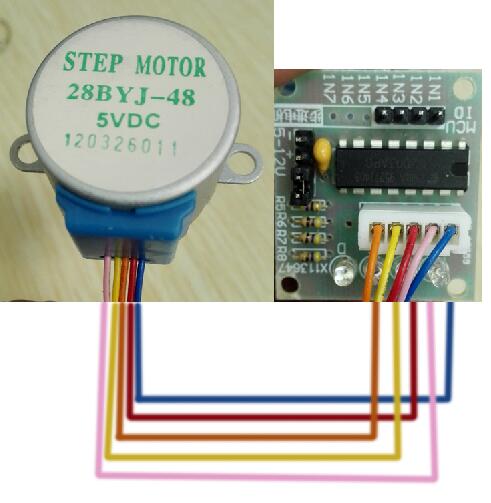
电机上的12345针脚,对应着接线端子的42135。
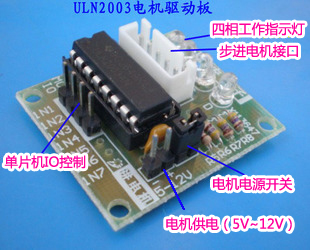
2、ULN2003步进电机驱动板可以让你方便的用Arduino控制28BYJ-48步进电机。驱动板的电机供电接口可以连接到Arduino的GND和5V取电,但是不推荐这种方法,推荐用独立的5-12伏1安培的电源或电池组取电。“IN0~IN4”连接arduino的4个数字口(在代码里进行相应的设置)。
3、28BYJ-48步进电机的齿轮减速比为64:1,转速约15转/分钟,一些软件采用某些手段和高电压电源(如12伏直流)也能达到约25转/分钟的转速。
4步控制信号序列:11.25度/步,32步旋转一周。
8步控制信号序列:5.625度/步, 64步旋转一周。
正常情况下,4步模式下旋转一周将用:32(步/周)X64(齿轮比) = 2048 步。
代码如下:
//使用arduino IDE自带的Stepper.h库文件
#include <Stepper.h>// 这里设置步进电机旋转一圈是多少步
#define STEPS 100//设置步进电机的步数和引脚(就是注意点2里面说的驱动板上IN1~IN4连接的四个数字口)。
Stepper stepper(STEPS, 8, 9, 10, 11);void setup()
{// 设置电机的转速:每分钟为90步stepper.setSpeed(90);// 初始化串口,用于调试输出信息Serial.begin(9600);
}void loop()
{// 顺时针旋转一周Serial.println("shun");stepper.step(2048); //4步模式下旋转一周用2048 步。delay(500);// 逆时针旋转半周Serial.println("ni");stepper.step(-1024); //4步模式下旋转一周用2048 步。delay(500);
}这篇关于Arduino - 28BYJ-48步进电机+ULN2003驱动模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




