本文主要是介绍欧姆龙cp1h带两个nc413模块,总共十个轴控制程序案例,还有DD马达控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
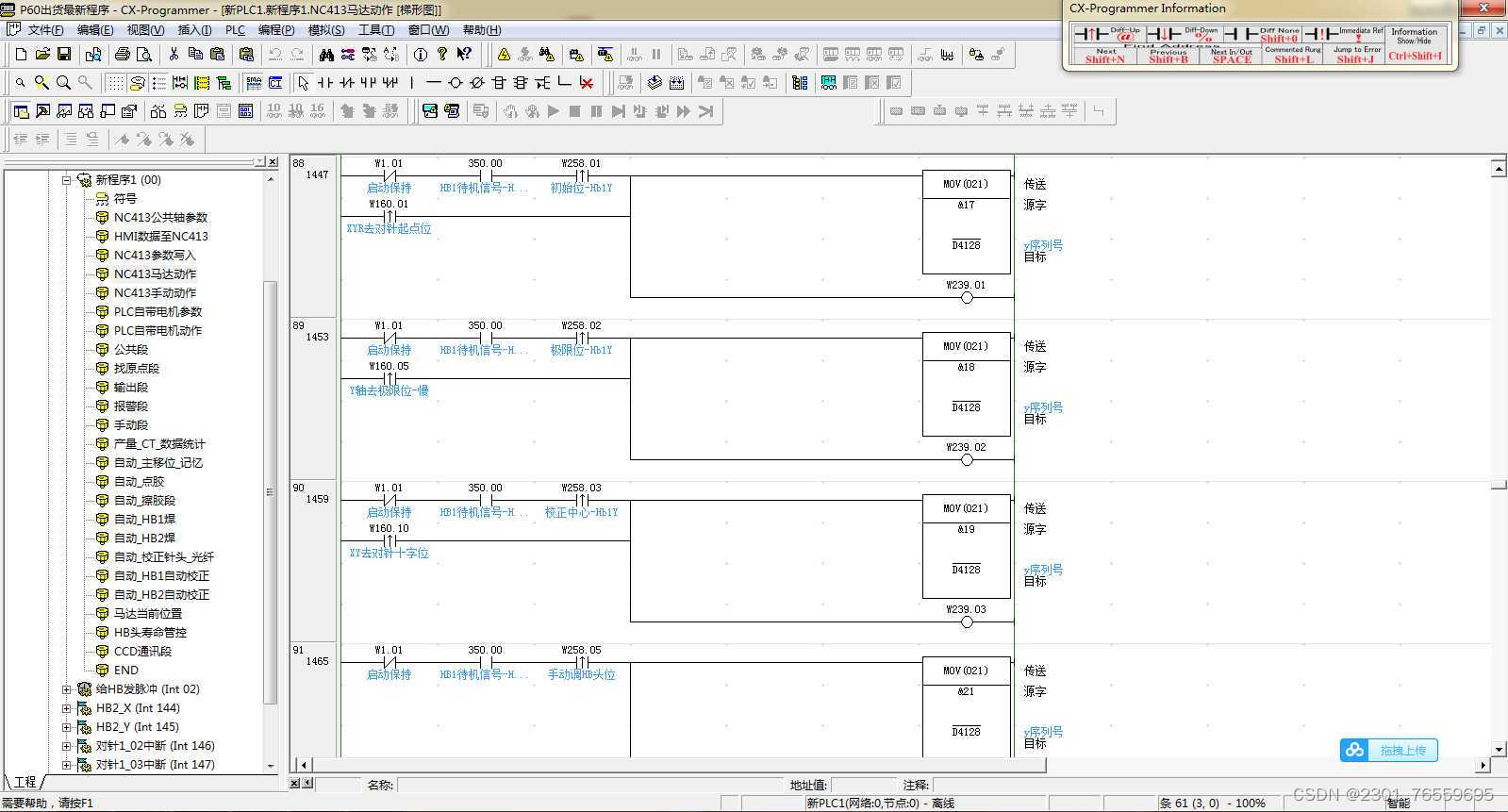
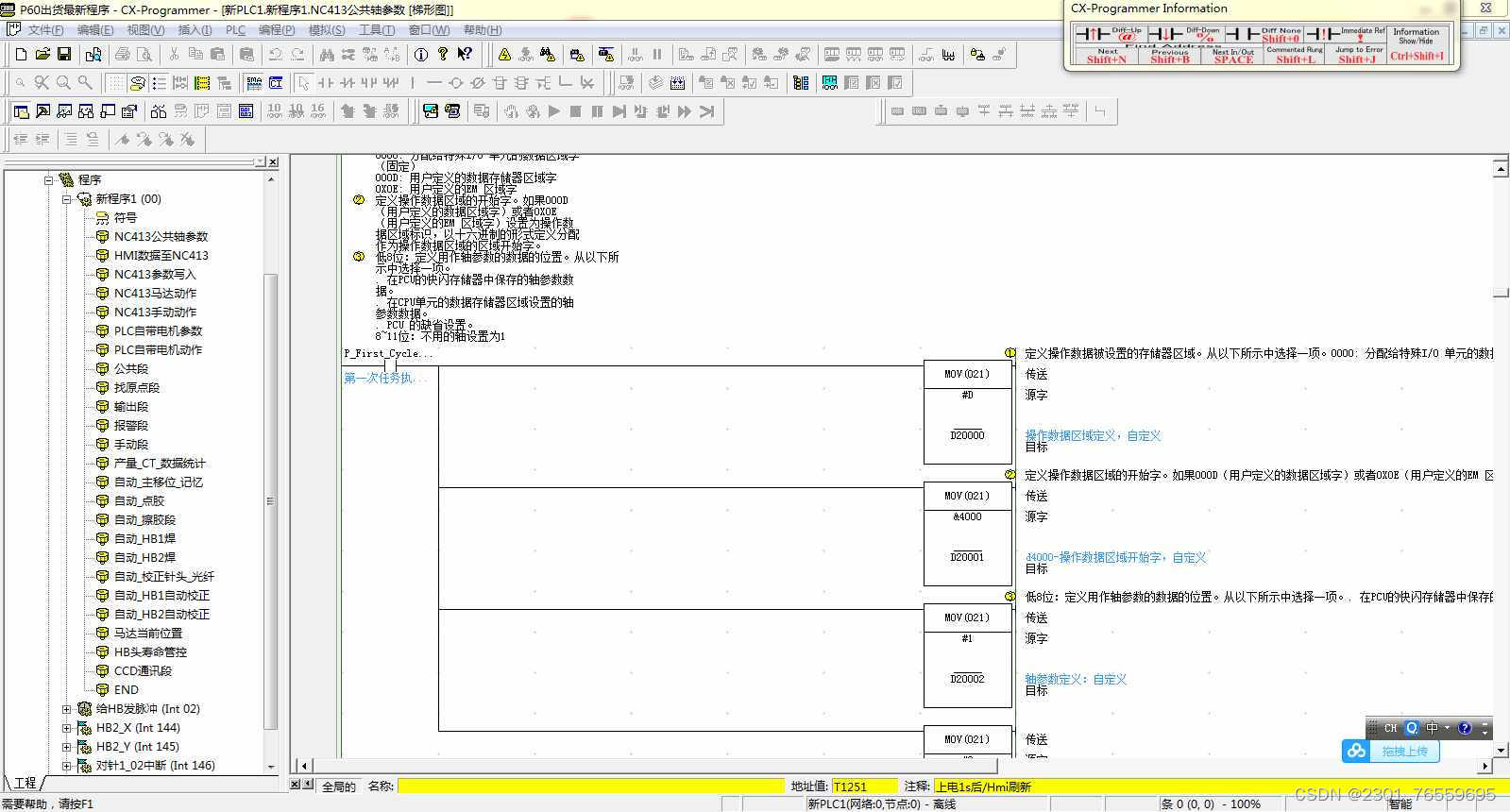
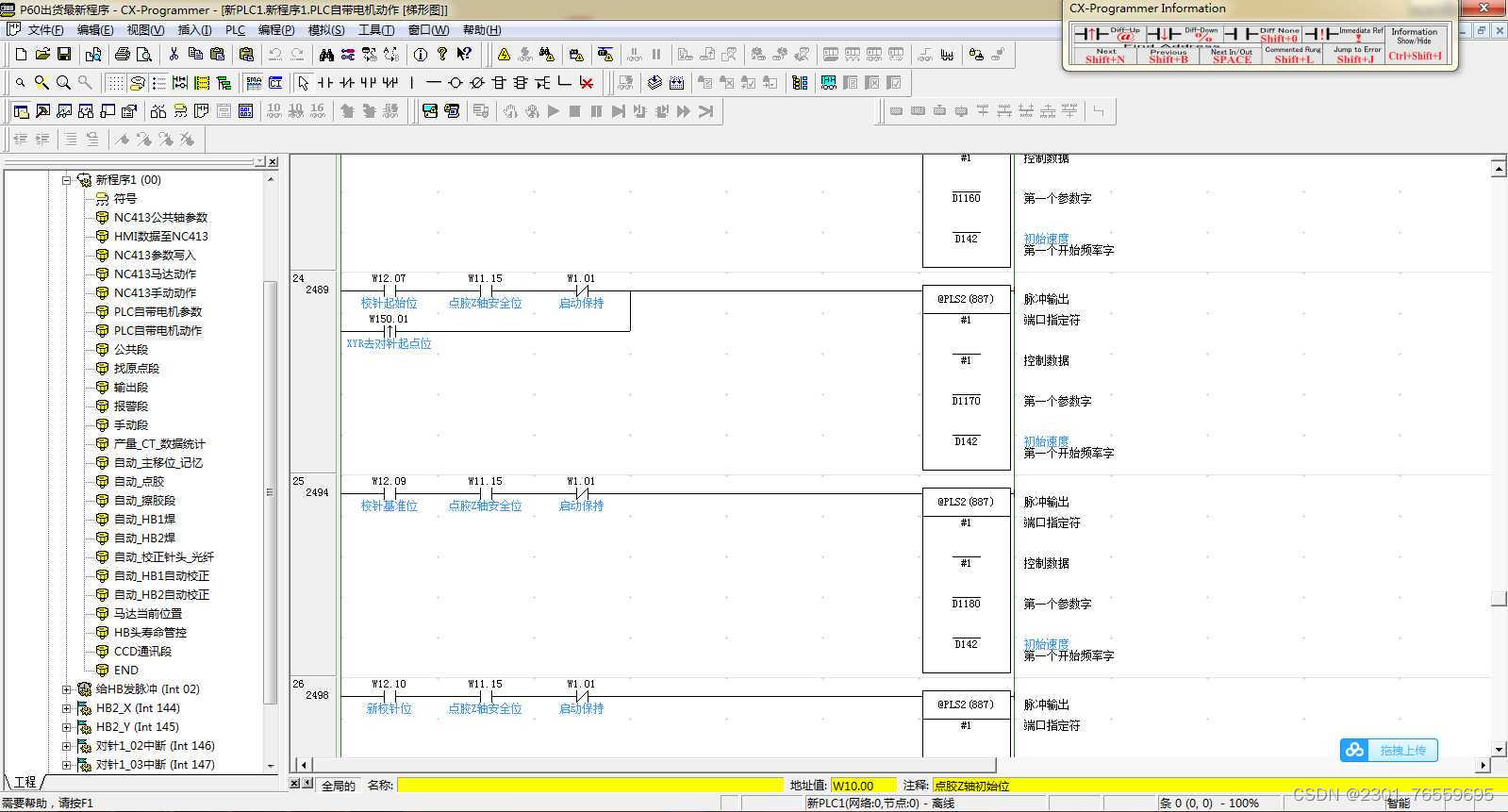
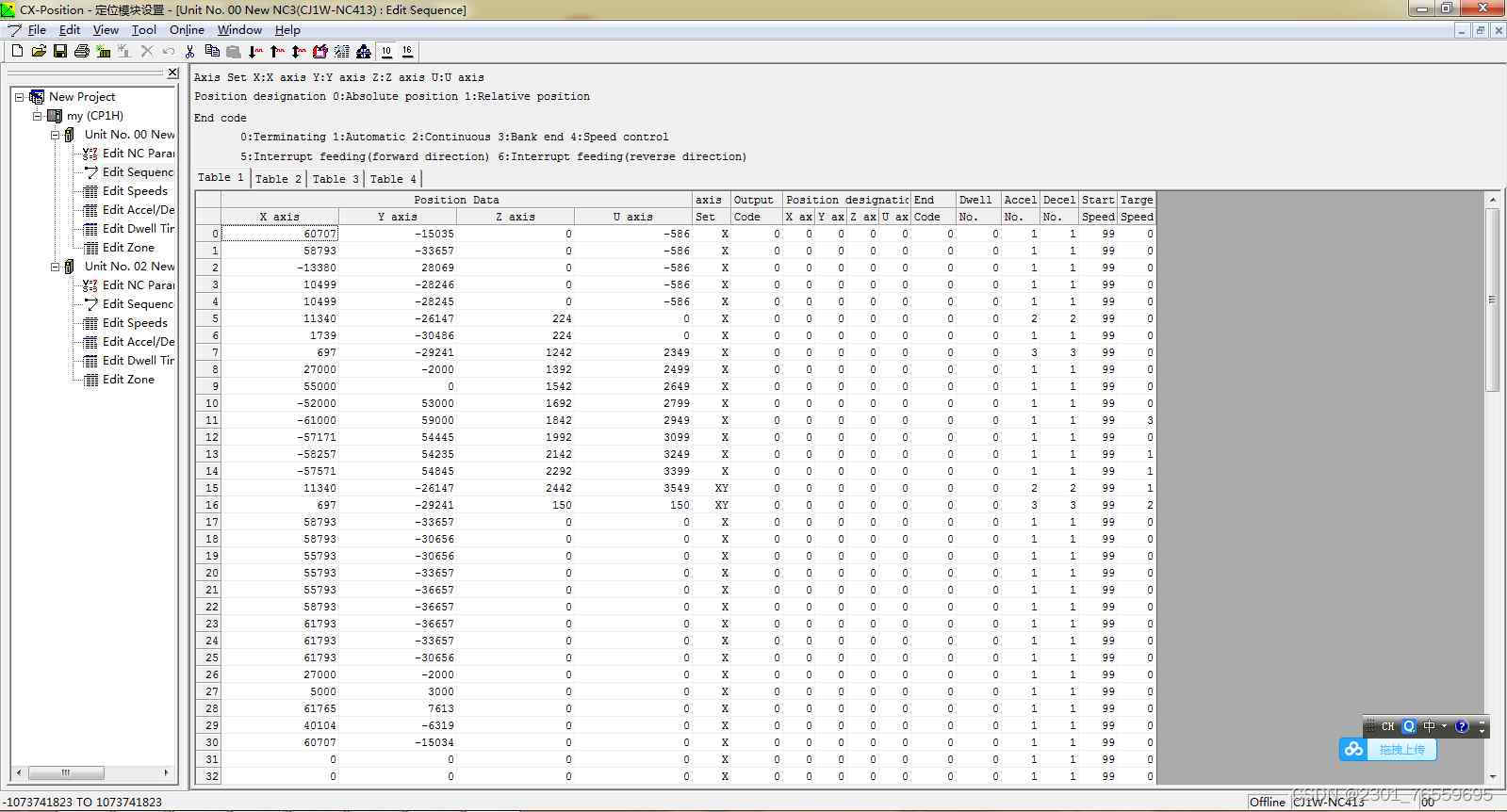
欧姆龙cp1h带两个nc413模块,总共十个轴控制程序案例,还有DD马达控制,内带详细注释,包含nc413所有参数设置,写入,定位控制,附带昆仑通泰触摸屏程序和dd马达程序

YID:349608416494704
这篇关于欧姆龙cp1h带两个nc413模块,总共十个轴控制程序案例,还有DD马达控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







