本文主要是介绍百度飞浆图像分割课程 笔记13:全景分割 UPSNet [CVPR 2019],希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Top-down:先做检测,再做分割
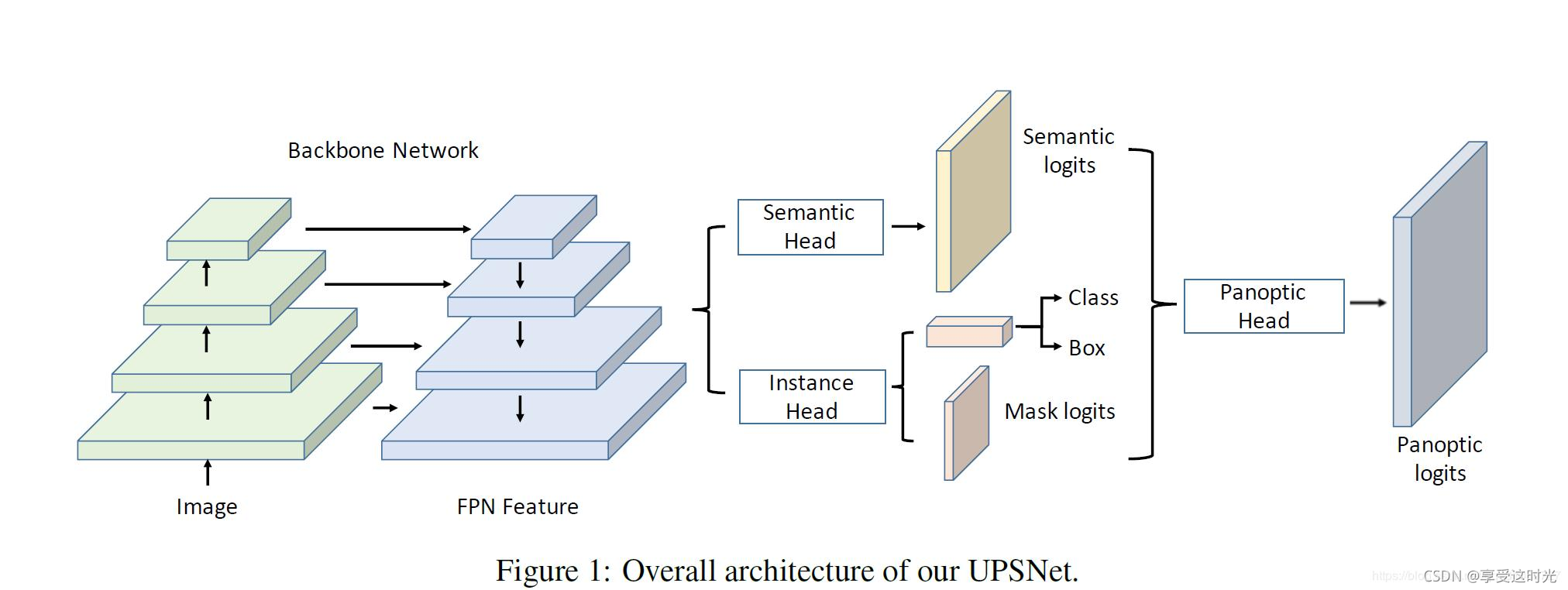
UPSNet:A Unified Panoptic Segmentation Network
论文链接: https://arxiv.org/pdf/1901.03784.pdf
代码链接: https://github.com/uber-research/UPSNet
- 设计一个基于可变形卷积的语义分割头和一个Mask R-CNN 的实例分割头,同时解决这两个子任务
- 引入无参数全景头,通过像素级追踪解决全景分割
1. Backbone
采用原始的 Mask R-CNN 主干作为卷积特征提取网络。 该主干利用具有特征金字塔网络 (FPN)的深度残差网络 (ResNet) 。
2. Instance Segmentation Head
实例分割头遵循 Mask R-CNN 设计,具有边界框回归输出、分类输出和分割掩码输出。 实例头的目标是生成可以更好地识别事物类的实例感知表示。 最终,这些表示被传递到全景头,为每个实例的 logits 做出贡献。
3. Semantic Head
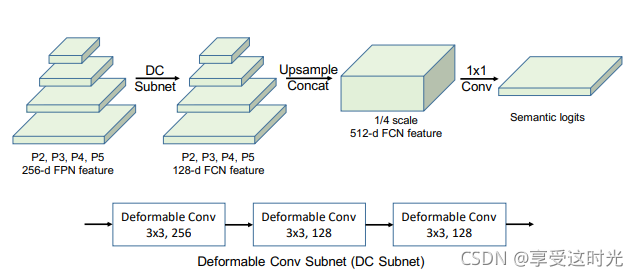
语义分割头的目标是在不区分实例的情况下分割所有语义类。 它可以帮助改进实例分割,从而实现事物类的良好结果。 语义头由一个基于可变形卷积 [9] 的子网络组成,该子网络将来自 FPN 的多尺度特征作为输入。 特别地,我们使用 FPN 的 P2、P3、P4 和 P5 特征图,它们包含 256 个通道,分别是原始比例的 1/4、1/8、1/16 和 1/32。
这些特征图首先独立地通过相同的可变形卷积网络,然后被上采样到 1/4 比例。 然后我们将它们连接起来并应用 1×1 卷积和 softmax 来预测语义类。
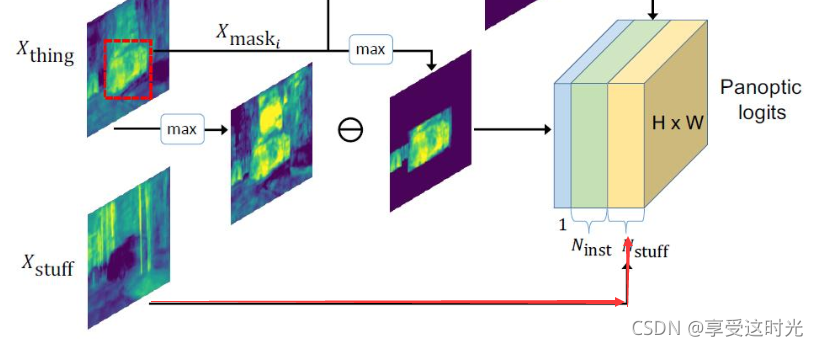
4. Panoptic segmentation head
目的:怎么把实例分割结果 Y i Y_{i} Yi和语义分割结果 X s t u f f X_{stuff} Xstuff, X t h i n g X_{thing} Xthing组合起来,构建全景分割map
全景分割map,每个pixel 属于哪个stuff类别(天空还是草地),属于哪个实例类别,第几个

其中 X s t u f f X_{stuff} Xstuff, X t h i n g X_{thing} Xthing:语义头中的 stuff(不可计数的) 和 thing 类(可计数的)
①对于 X s t u f f X_{stuff} Xstuff ,构建成全景分割的map的方法
直接拼在在后面就可以了。(红色箭头)
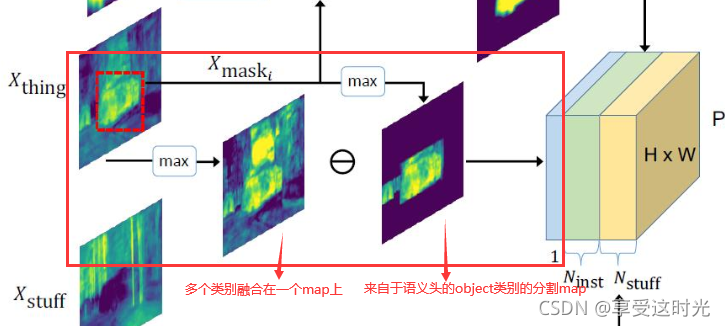
②对于 X t h i n g X_{thing} Xthing,构建成全景分割的map的方法
X m a s k i X_{mask_{i}} Xmaski:语义头中第i个实例的表示,也就是用bounding boxes的把bbox对应的空间区域也给获取
Y i Y_{i} Yi:第i个实例 的 mask logits, Y m a s k i Y_{mask_{i}} Ymaski = interpolate( Y i Y_{i} Yi)
把 Y i Y_{i} Yi resize或者padding成和 X m a s k i X_{mask_{i}} Xmaski一样大小,然后相加,也就是说对于实例在全景map的结果,由语义分割头对应的空间区域与实例分割图对应的区域的两个概率map相加。(红色箭头)
Z s t u f f + i = X m a s k i + Y m a s k i Z_{stuff+i} = X_{mask_{i}} + Y_{mask_{i}} Zstuff+i=Xmaski+Ymaski

③Panoptic segmentation head的关键设计
假设检测10个物体,但是漏检了2个物体。怎么保证模型不会把漏检测的类别当成stuff类。
专门设置了一个通道,为漏检的区域做一个不知道的类别的概率,保证模型不会把漏检测的类别当成stuff类。使得模型有个比较好的鲁棒能力。
假设10个物体的区域已经确定了,然后从语义分割图中,可以把object类别的分割图拿到。做一个减法。
X m a s k X_{mask} Xmask: concate X m a s k i X_{mask_{i}} Xmaski 的所有mask
Z u n k n o w Z_{unknow} Zunknow:缺少一些实例(本应该是object的区域,但没有检测出来 )
Z u n k n o w = m a x ( X t h i n g ) − m a x ( X m a s k ) Z_{unknow} = max(X_{thing})-max(X_mask) Zunknow=max(Xthing)−max(Xmask)
5. 构造好了全景的分割图,对每个像素做argmax
- 如果概率最大值在 N s t u f f N_{stuff} Nstuff中就知道类别。
- 如果概率最大的值在 N i n s t N_{inst} Ninst中,则知道是属于第几个实例,怎么知道类别呢?
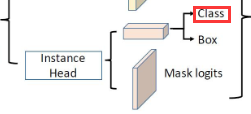
类别在instance head输出的class中已经知道了。
这篇关于百度飞浆图像分割课程 笔记13:全景分割 UPSNet [CVPR 2019]的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







