图箱视野中的青藏高原
借着开放式数据,图箱(Map box)在网络地图的市场上正扮演一个大玩家的角色。而现在他们想要做的就是修复卫星视图。
2013年二月,影像专家查理·劳埃德当时正在找工作。他一直致力于一种可以使得卫星图像更加美丽的方法,但他需要更好的资源去完成这个项目,于是他在推特上发了一张格陵兰岛北端的对比图,三分钟之后,图箱回复了这条推。没过多久,劳埃德就被雇佣了。通过对图箱的卫星层大量的修整,他们之间的合作在今天开花结果。
作为一个地图公司,图箱为客户提供了一个基于OSM[1]和其他公开数据的平台,用户可以在这个平台上制作自定义地图。要想了解他为什么这么强烈的渴求将劳埃德收入麾下,我们需要做个小示范。
打开你最喜欢的地图网址(谷歌、必应、求图(Mapquest),或是雅虎都可以)并且转换到卫星模式。缩小的所有道路。发现奇怪点了吗?首先你会注意到,莫名其妙的夏天随处可见,北部和南半球都少有积雪,处处绿意盎然;其次,便是没有云。
再放大点,你就会发现更奇怪的事情。有时候图中会有裂缝。在某些地区地面景观的颜色会发生巨大的变化。还有一些地方的地面看起来非常不清楚,好像是用摄像头照的似得。

这就是让劳埃德在图箱找到工作的那幅图。左边是格陵兰岛最北端在谷歌地图上的样子,数据来源于NASA的蓝色大理石项目。右边则是通过劳埃德的算法输出的样图。
这些槽点告诉我们,我们现在所看到的地图是由来自各种不同源头的图像东拼西凑在一起的。这是大数据的问题,而且这样常常会造成错误和缺陷。对于某些人来说,在地图里“找茬儿”可是一种爱好。所以图箱的使命便是消除这些缺陷。下面我们来看看他们在屏幕背后是怎样完成这个过程的。
图箱的执行总裁埃里克·冈德森说,图像托生于个人对于更好的地图自定义工具的需求。公司最早只是利用OSM的数据来进行一系列的公开资源项目。当他们证实了人们确实需要这种服务时,图箱转向了商业运作。而把这项业务做大的时机便是谷歌开始为地图介入接口收费的那一刻。今天,图箱为类似四方网(Foursquare)和全能便签(Evernote)等网站的地图设备提供了动力,而它们过去的客户还包括NPR, The Guardian, Greenpeace 以及FCC。“哪儿需要地图,哪儿就有我们,”他说道。
图箱此前的地图都是通过OSM的矢量数据制作出来的,冈德森说。客户可以通过公开数据制作软件TileMill 以及一种叫做CartoCSS的类CSS语言去修改地图,以自定义视觉和感觉,并把他们当做数据视觉化工具,或者只是简单地给地图打上商标。2012年12月,在数据分析师克里斯·荷瑞格的带领下,图箱放出了卫星图像层的第一版本。劳埃德加入这个队伍则是来帮助他们完善这个成果。

这是一幅漂亮的地图的原始版本。是由MODIS的泰拉卫星于2013年3月28日捕捉到的地球图像合成的。地球被云覆盖着,在卫星没有扫描到的地方有裂缝,赤道附近还有太阳的闪光。图片来源:美国宇航局LANCE-MODIS。
那么你是怎样将卫星捕捉的混乱数据演变成现在图像所提供的美丽而理想化的地图的呢?答案就是:一个像素一个像素地来。
图箱最开始使用的公共领域数据来自于NASA的LANCE-MODIS数据系统。图像由一对卫星,泰拉和水蓝拍摄,这两个卫星分别自1999和2002年开始绕地球运行。他们能够捕获多种波长的数据,包括视觉领域,这便是图箱一直在使用的。
“为了准备新版本我们已经进行了两年的图像处理,所有自2011年1月1日至2012年12月13日间捕获的图像,”劳埃德说,“这相当于超过339,000的1600万像素+的卫星图像,共计超过5,687,476,224,000像素。我们将其浓缩至五十亿像素左右”。
首要的问题在于获取数据。这在公共领域全部可以取得,但是因为体积问题,但是将这些数据传输到图箱就是大工程了。渲染这些图像需要下载三分之二TB的压缩数据。“我们用了30到40台的服务器来从NASA下载数据,”贺维格说。“我们给NASA打个电话说,‘嘿,我们要敲一敲你家的硬件了,你说怎么做才最方便呢?’”
NASA有一个专门负责从服务器抓取数据的团队,确保在下载的同时不占用整个网络。“为此向NASA脱帽致敬,”冈德森说道。“而到了政府开放的地步,这就是API的问题了。我们真正需要的是政府为批量下载提供基础设施”
一旦这些图像数据为图箱可利用,问题就由图像本身转向了过滤云层,闪耀的阳光和大气雾霾,将之转变为清晰地面图像。
通常情况下,我们要做的就是找出每一个地区最清楚的日子,然后把那天的图像拼接起来。“不幸的是,这样会留下裂缝”劳埃德写道,“相邻的图像可能发生冲突(例如当这些图像来自不同季节的时候)并且将人们的注意力吸引到基础层,制图人可不希望这样。”
为了解决这个问题,图箱用了一种更细粒度的方法。将一个地区的所有的图像重叠起来。接着,基于图箱对云的含量的判断,重新排列重叠图像中每一列的像素。“我们对世界上每一个像素进行了这项工作”劳埃德说。

制作没有云的地图,第一步:这些是2012年一个小地区的图像输入。如果你近距离观察,你也许能发现这是哪儿。“正如你所看到的,整个地区全年中仅有几天是非常清晰的,放大看看,你会在图中发现当时的云,”劳埃德说道。
图箱会重组这些像素,首先取得最少云的像素的平均值,借着这个平均值就成为了地图上这一特定点的标准像素,像素之多令人眼花缭乱。劳埃德说,当他和他的团队在完成了大概百分之四十的工作时,他计算出如果他们把地图用300dpi打印出来,将会占据2公顷的土地。
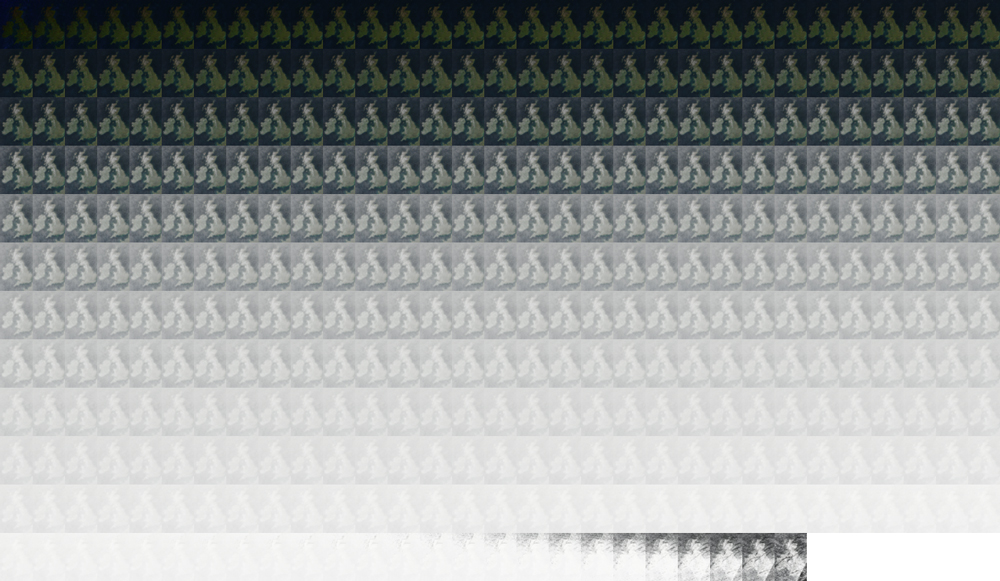
制作没有云的地图,第二步:当图箱获取了图像,图箱的算法会首先将图像过滤一遍,并将这些图像按像素由最暗到最亮排列。地形开始将自身和云剥离开来,然后你就可以看清楚你眼前的东西了。
当然图箱也得玩些别的花样。地表的颜色是在一年中是不断变化的,夏季的绿叶在秋季变黄,冬日里的白雪覆盖,接着在春天重返欣欣向荣。将这些色彩平均化的话就会得到一种像泥巴似得棕黄。所以团队用一些技术来确保他们能捕获色彩高峰值,也就是北半球的五月或六月,南半球的十二月或一月。而且,因为程序比较喜欢较暗的像素,第一次输出看起来会非常的暗淡而且曝光不足,劳埃德告诉我们。
这是一个完全自然的产物,“劳埃德说到。“每个像素都是真实的像素,由摄像头在空中捕捉到的。但是这也是一个完全人工的产品。”地图的目标是去粗略的捕捉空间中肉眼可见的事物,但是却能将之以呈现为一颗理想化的,万里无云的,处于永恒夏季的星球。“我们的目标是制作出最美丽的地图,”冈德森说。
“这是一个如何平衡的问题,你需要在借助数据的前提下做的正确,精准,同时你还要让它看起来像是我们每个人心中的地球的摸样。”

制作没有云的地图,第三步:英国在历史上可没有过这种样子(译者注:英国常年多云有雨)。但是这又是恰恰是它本来的样子。这是最暗像素的平均值,但是这并不是最终版本。“因为在最终的渲染层,我们输入了更多的数据并且做了一些后期加工来去掉卫星传感器带来的瑕疵,但是我认为我们加工的不错,”劳埃德说。
现在地图已经完成了,图箱有了一个完整的,无缝的卫星底图。“这是无云地图的第一章,”冈德森说。下一章就是回来再重新做一遍,只不过是在更深的缩放层次上。这之后,他们将会有一个让人们可以在上面建设的极好的基线地图,和一套用来分析的工具。
“到了最后,这就不仅仅是做个漂亮的地图的事儿了,你要做的是如何以极快的速度处理大量的数据”冈德森在一封邮件里这么说。“我们现有的快速渲染堆栈以及云端基础架构表明了我们能够处理多少数据——今夏晚些时候你会见到我们一些基于现有的堆栈的红外分析工作。这是一个广泛开放的空间,而传统的卫星通讯公司是做不到这一点的,他们总是纠结在卖像素上——要想利用大数据,你就必须成为一个软件公司。”
图箱团队表示,通过良好的基线平均值,追寻地表的变化变得更容易了,例如那些因自然或人类活动导致的地区性的植被变化。“如果你在网上搜索,例如,红外遥感,你会得到一个充满可能性的想法,而且你可以开始想象,由于跨界剪辑的需求,这些庞大的开放的多光谱卫星数据的资料可随意使用,”劳埃德写道。“冰川,野火,作物,干旱和洪灾,城市和森林,地表温度,浮游生物繁生,季节动态,甚至于烟雾 ——都在这儿了。你只需要做点什么让它更清楚”
“根据谷歌最新的报道,这是一个价值270亿美元的空间,”冈德森写道。“我们并不是买下一个平庸的点子,然后花一百万美元开一个小小的地图公司。数据开放并不仅仅为我们创造了机会,还会给我们带来长期的优势”
作为一家只有30人,坐落在华盛顿郊区,但是掌握了核心技术的小公司,图箱团队认为自身将在大科学和大商业中扮演具足轻重的地位。
“我们是在公开资源和公开数据的基础上玩这个游戏,而且我们成功了,借此我们得了客户。”
[1] OSM: OpenStreetMap是一个网上地图协作计划,目标是创造一个内容自由且能让所有人编辑的世界地图。OSM的地图由用户根据手提GPS装置、航空摄影照片、其他自由内容甚至单靠地方智慧绘制。网站里的地图图像及向量数据皆以共享创意姓名标示-相同方式分享2.0授权。OSM网站的灵感来自维基百科等网站。这可从该网地图页的“编辑”按钮及其完整修订历史获知。经注册的用户可上载GPS路径及使用内置的编辑程式编辑数据。
本译文仅用于学习和交流目的。非商业转载请注明译者、出处,并保留文章在译言的完整链接。
- 原文来源:wired.com
- 原文标题:A Cloudless Atlas — How MapBox Aims to Make the Worlds Most Beautiful Map | Wired Design | Wired.com
- 原文地址:http://www.wired.com/design/2013/05/a-cloudless-atlas/