本文主要是介绍2023辽宁省数学建模竞赛选题建议及AB题思路,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
大家好呀,今天早上2023年辽宁省大学生数学建模竞赛开赛,在这里给大家带来初步的选题建议及思路。
注意,本文只是比较简略的图文版讲解,完整的视频版讲解请移步:
2023辽宁省数学建模竞赛选题建议及初步思路_哔哩哔哩_bilibili
首先是主基调:
本次推荐大家做AB题,A题目较简单,主要是引入理论公式后,根据影响因素计算力的大小,我会加入很多可视化和模拟代码来丰富论文内容。B题目硬核一些,主要做模拟仿真,后面的迁移预测会上点难度,如果你有matlab基础,也可以拿B题。C题主要是搜集文献这些,比较难做的出彩。
接下来详细讲讲初步思路吧:
A 题 铁路车站的安全标线
(1) 根据相关机理,考虑人的体重、体积以及和人的距离等影响因素,建立 数学模型确定高铁或动车全速经过时,对站在站台人的“吸力”或“推力”的大小
首先当然是要引入一些必要的公式,例如伯努利方程。之后根据方程进行实际代码编写。
对于A而言,我主要是想尽可能丰富可视化,因此,我的代码想要实现的效果是只要你输入了人的体重、体积和人的距离,就可以得出力的具体大小,举个例子,输入:
添加图片注释,不超过 140 字(可选)
可以得到:
![]()
添加图片注释,不超过 140 字(可选)
来看看代码运行截图:
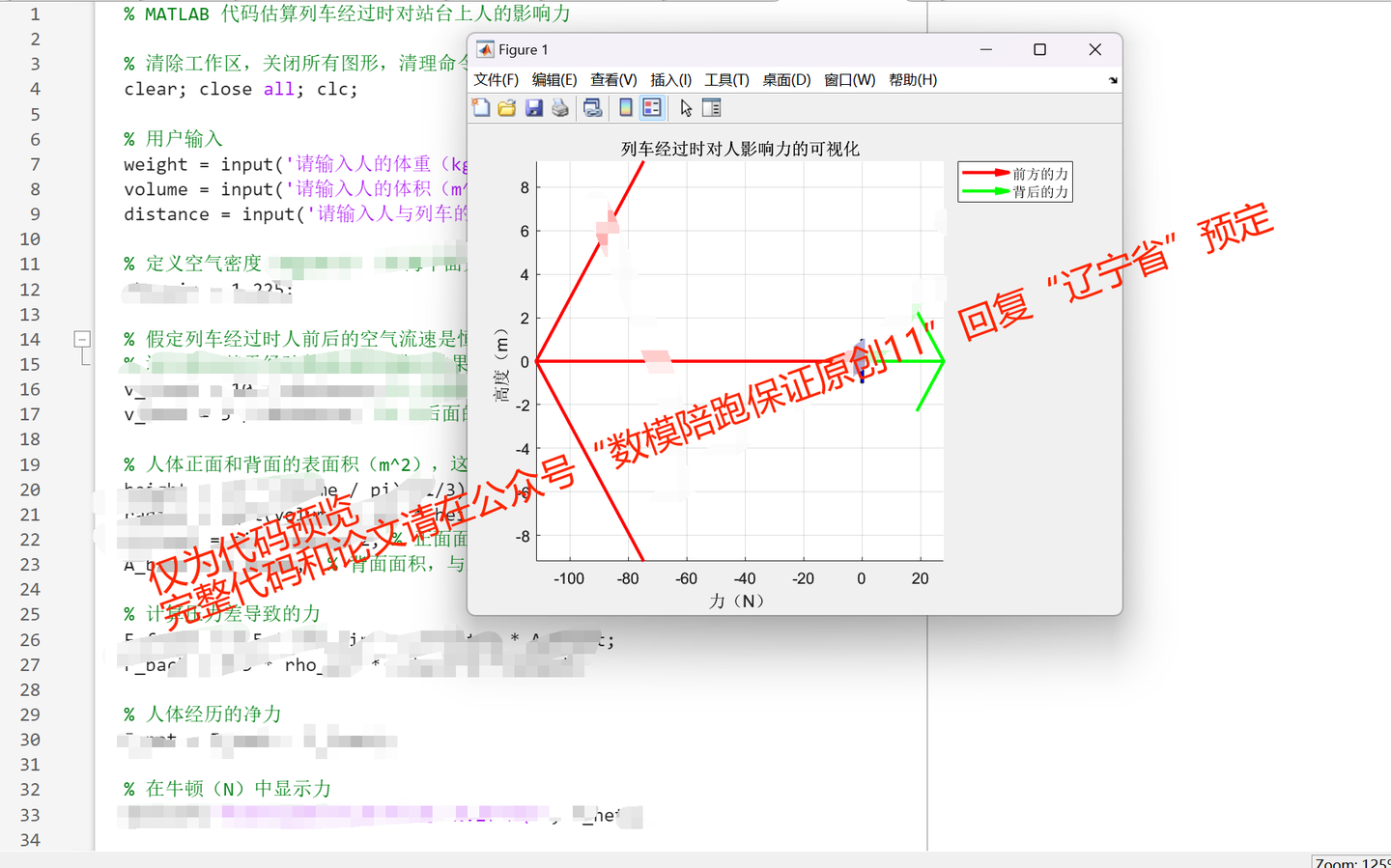
添加图片注释,不超过 140 字(可选)
(2) 依据(1)的结果,建立数学模型,说明高铁、动车车站站台的安全标线的 设置依据;
第一问求解出来之后第二问就比较简单了,直接计算哪个距离的时候,两个力基本会相等,大于这个距离就行。主要考虑身高最高,体重最轻的人,因为我们要保护每一个人。
B 题 数据驱动的水下导航适配区分类预测
问题一:附件 1,给出一组分辨率为 1’×1’(相邻两格网点间的距离是 1’) 的重力异常基准数据 A,试通过精细化基准图,合理划分区域,完成各区域的适 配性标定(标签Y )。
看看题目给出的数据:

添加图片注释,不超过 140 字(可选)
主要就是一些离散的点的经纬度和重力异常值,我们要标定这些点的区域到底是不是适配区。来看看题目背景:
在重力辅助导航系统中,影响导航可靠性与精度的关键步骤是选择匹配性高 的航行区域,即适配区。适配区的标定与识别技术是最具挑战性的问题之一。选 取适配区前需要对研究海域的重力基准图(基础性的是重力异常基准图)进行插 值加密处理,基于重力基准图所提供水下航行器航行区域的重力异常变化情况对 适配区的选取进行分析。 重力异常(值)的定义为:实际地球内部的物质密度分布不均匀,导致实际 观测重力值与理论上的正常重力值总存在偏差,在排除各种干扰因素影响后,仅 仅由地球物质密度分布不匀所引起的重力的变化,简称为重力异常 在重力异常变化显著区域,导航系统可获得高的定位精度;反之,在重力异常变化平坦区域,导航系统会出现定位精度的不敏感。由于不同区域的重力异常特征分布不同,建立可行的适配区分类预测模型,对保障水下航行器的导航精度 至关重要。
OK,所以主要就是看哪里的重力异常值会显著变化。所以我们先插值补全数据,然后计算重力异常值的变化情况就行,哪个区域变化大,哪里就是适配区。我划分了高中低三个档来划分区域:

最终输出的图片如上图,就是三个颜色代表高中低三个适配程度。
至于第二问,就是先计算特征指标,比如均值、标准差、梯度等等,然后做分类预测就行。
OK,先讲到这里。
AB的思路讲解后续都还会更新哈。总体而言,本次辽宁省数学建模竞赛不算很难,我AB都做,大概率先出A,预计今晚到明早更新完毕,B预计明天中午前出。
视频讲解查看以及完整论文成品预定请点击下方我的个人卡片哈↓:
这篇关于2023辽宁省数学建模竞赛选题建议及AB题思路的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








