本文主要是介绍基于显扬科技自主研发3D机器视觉HY-X5在物流行业引导拆码垛的应用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
行业现状:
近些年,随着工业自动化与物流技术的不断发展,如何使用自动化设备提高物流效率,减少人工,成为目前物流行业最关心的问题。机器视觉系统可以迅速获取大量图像信息,并进行自动处理,该特点使得机器视觉帮助物流行业快速向智能化、自动化方向迈进。目前在工业自动化应用中,机器视觉广泛应用于缺陷检查、扫描识别、定位判断和位置测量等领域。在节省人力成本、提高整体作业效率的同时可以极大的提高空间利用率,从而降低运输成本。
难点:
随着电商、物流行业的快速发展,分拣方式的发展迫在眉睫。人工分拣存在效率低,错误率高,成本高等缺点,特别是在拆码垛应用中,由于作业强度大,工作内容单一,人工作业的质量及效率普遍低下,自动化拆码垛系统应运而生。而传统自动化拆码垛应用中,“拆”和“码”的对象往往要求是规则且尺寸单一的货物,这就限制了自动化应用的范围,尤其是拆码垛作业环节中,在来料完全随机的情况下,用传统的人工示教的方式难度大且效率低下。
解决方案:
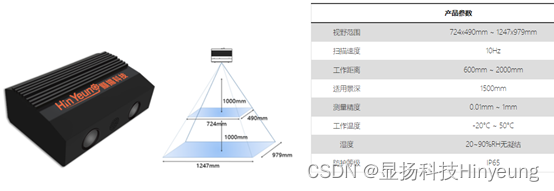
为了解决此问题,显扬机器人研发了一套基于机器视觉引导的机械臂拆码垛方案,可以解决多SKU且来料无序的问题。方案使用的3D相机为显扬科技三维高速高清机器视觉设备HY-X5系列,兼具高精度、抗反光、大视野的特点,相机检测精度达到0.01mm, 检测范围达到2000mm,近视场为724mm×490mm,远视场为1247mm×979mm。同时具备极高的检测效率和稳定性,从拍照到轨迹算法输出抓取点位的时间达到0.1s。
步骤:
该方案中,3D相机负责获取作业范围内,如托盘或传送带上箱体的深度信息及高清2D图像,并将深度信息及2D图像信息发送给机器人控制平台软件,平台软件中内置3D视觉算法和智能轨迹规划算法,3D视觉算法通过AI深度学习+3D点云分割的方法将箱体在托盘或皮带线上的位置快速且准确的定位到,智能轨迹规划算法提供准确的抓取点位、放置点位和轨迹点位,引导机械臂快速抓取和码放动作。
方案优势:
1、基于高精度3D相机对抓取物和环境的2D彩色图像信息,同时结合3D点云数据,精确提取抓取物边缘轮廓,依靠智能算法,筛选最优抓取点位,并基于软件中设定的环境约束,输出最优轨迹点位,提高了整体系统的准确性和可靠性;
2、通过使用该系统,用户可以轻松应对多SKU且来料完全随机的拆码垛场景,在满足自动化拆码垛需求的同时,进一步提高生产效率,降低生产成本;
3、精度高:显扬科技的3D视觉设备HY-X5的成像精度高达1mm,可高精度测量,判断缺陷检测信息正确率高达99%,实现高精度抓取识别。

显扬科技由香港中文大学博士团队创建,主要研究并产业化高速高清三维机器视觉系统,以及智能工业机器人系统。其研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达310帧,此外还具有高精度、大景深、高稳定性的优势,可实现高效率机器人引导,以及工业检测与测量。显扬科技的产品主要应用在对采集速度要求较高的快速工业产线、物流枢纽以及对测量精度要求高的精密制造、军工航天、半导体产业等。
这篇关于基于显扬科技自主研发3D机器视觉HY-X5在物流行业引导拆码垛的应用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




