本文主要是介绍PC-DMIS 2019 SmallArcAnalysis(大半径小圆弧),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
DMISMN/'Small_Arc_Analysis',05.3
$$ PCD_PART_PROGRAM: PC-DMIS generated DMIS file
$$ 修订号:
$$ 序列号:
$$ 统计计数: 1UNITS/INCH,ANGDEC
INCLUD/DMIS,'PCD_DMIS_DEFINES.DMI'
V(PCD_EWPO)=VFORM/ALL
DID(PCD_EWPO_DEVICE)=DEVICE/STOR,'.PDF'
OPEN/DID(PCD_EWPO_DEVICE),FDATA,V(PCD_EWPO),OUTPUT,APPENDD(STARTUP)=DATSET/MCS$$$
==========================================================================================================
$$.
$$$
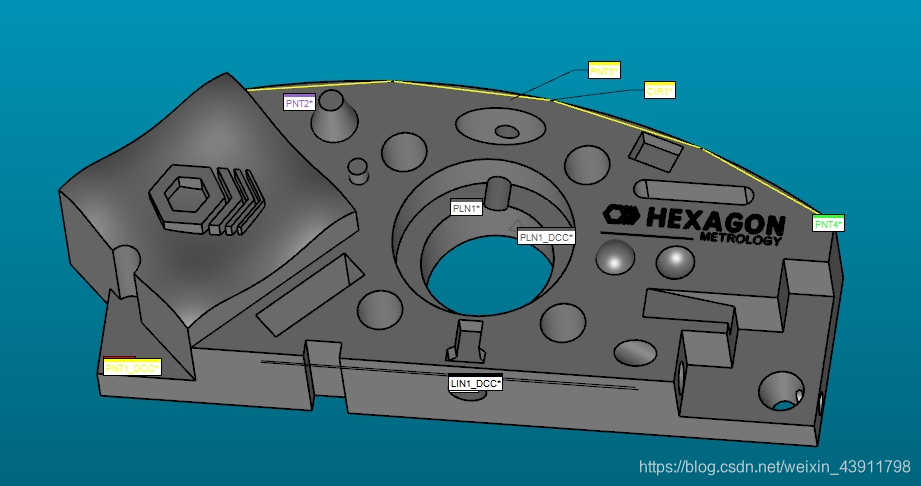
. Hexagon example measurement routine showing how to reduce measurement uncertainty when
$$. measuring circles with less than 90° of arc.
$$.
$$$
. PLEASE NOTE: In order to run this measuremnt routine on-line you will need a hexagon demo block
$$$
. You will also need to edit the loadprobe command and select a valid, calibrated probe
$$. that is relevant for your CMM.
$$.
$$$
==========================================================================================================MODE/MANSNSET/APPRCH,0.0197SNSET/RETRCT,0.0197FEDRAT/POSVEL,MMPS,500FEDRAT/MESVEL,MMPS,4FLY/1V(L1)=VFORM/NOM,ACT,DEV,AMTSNSMNT/XVEC,0,-1,0,ZVEC,0,0,1,MNTLEN,0,0,-3.0315
DMESW/COMAND,'加载测头/D2L30'SNSLCT/S(TIP1)$$.
$$. STEP 1) Align the part in the usual manner.
$$.DMESW/COMAND,'MAN_ALIGN=数组/显示所有参数=否,执行控制=已标记'F(PLN1)=FEAT/PLANE,CART,4.4011,2.6162,0,0,0,1MEAS/PLANE,F(PLN1),3PTMEAS/CART,3.6767,3.7241,0,0,0,1PTMEAS/CART,6.3059,3.6437,0,0,0,1PTMEAS/CART,3.2207,0.4808,0,0,0,1终止测量RECALL/DA(STARTUP)DATDEF/FA(PLN1),DAT(A)D(A1_1)=DATSET/DAT(A),ZDIRD(A1_2)=TRANS/ZORIG,FA(PLN1)D(A1)=TRANS/XORIG,0.0F(LIN1)=FEAT/LINE,UNBND,CART,2.2066,0,-0.2191,1,0,0,0,-1,0MEAS/LINE,F(LIN1),2PTMEAS/CART,2.2066,0,-0.2218,0,-1,0PTMEAS/CART,7.1161,0,-0.2165,0,-1,0终止测量RECALL/DA(A1)DATDEF/FA(PLN1),DAT(A)D(A2_1)=DATSET/DAT(A),ZDIRD(A2_2)=TRANS/ZORIG,FA(PLN1)D(A2_3)=ROTATE/ZAXIS,FA(LIN1),XDIRD(A2_4)=TRANS/YORIG,FA(LIN1)D(A2)=TRANS/XORIG,0.0F(PNT1)=FEAT/POINT,CART,0,0.3715,-1.0652,-1,0,0MEAS/POINT,F(PNT1),1PTMEAS/CART,0,0.3715,-1.0652,-1,0,0终止测量RECALL/DA(STARTUP)DATDEF/FA(PLN1),DAT(A)D(A3_1)=DATSET/DAT(A),ZDIRD(A3_2)=TRANS/ZORIG,FA(PLN1)D(A3_3)=ROTATE/ZAXIS,FA(LIN1),XDIRD(A3_4)=TRANS/YORIG,FA(LIN1)D(A3_5)=TRANS/XORIG,FA(PNT1)D(A3)=TRANS/XORIG,0.0
DMESW/COMAND,'数组结束/标识=MAN_ALIGN'DMESW/COMAND,'安全平面/Z正,50,Z正,0,开'DMESW/COMAND,'DCC_ALIGN=数组/显示所有参数=否,执行控制=已标记'PCD_INTGR=PROMPT/TEXT,$'Changing to DCC mode! Do not continue unless avoidance moves have been added.',$BUTTON,'确定(&O)',1,BUTTON,'取消(&C)',2MODE/AUTOF(PLN1_DCC)=FEAT/PLANE,CART,5.2904,2.1702,0,0,0,1MEAS/PLANE,F(PLN1_DCC),23DMESW/COMAND,'移动/安全平面'PTMEAS/CART,3.1158,0.5151,0,0,0,1PTMEAS/CART,3.5691,1.2565,0,0,0,1PTMEAS/CART,3.59,2.1143,0,0,0,1PTMEAS/CART,3.0762,2.3597,0,0,0,1PTMEAS/CART,2.0391,3.4706,0,0,0,1PTMEAS/CART,2.2736,3.9173,0,0,0,1PTMEAS/CART,3.0396,4.0461,0,0,0,1PTMEAS/CART,4.1454,4.0353,0,0,0,1PTMEAS/CART,4.2174,3.2861,0,0,0,1PTMEAS/CART,5.3965,3.2656,0,0,0,1PTMEAS/CART,6.0791,3.7727,0,0,0,1PTMEAS/CART,7.5706,3.2617,0,0,0,1PTMEAS/CART,9.0989,2.2939,0,0,0,1PTMEAS/CART,8.4432,1.7301,0,0,0,1PTMEAS/CART,7.044,1.9989,0,0,0,1PTMEAS/CART,6.5926,2.7933,0,0,0,1PTMEAS/CART,6.215,2.1579,0,0,0,1PTMEAS/CART,6.1246,1.4266,0,0,0,1PTMEAS/CART,6.7521,1.0986,0,0,0,1PTMEAS/CART,7.4706,0.2302,0,0,0,1PTMEAS/CART,6.2264,0.2851,0,0,0,1PTMEAS/CART,5.4083,0.28,0,0,0,1PTMEAS/CART,4.1914,0.3191,0,0,0,1终止测量RECALL/DA(STARTUP)DATDEF/FA(PLN1_DCC),DAT(A)D(A3_DCC1_1)=DATSET/DAT(A),ZDIRD(A3_DCC1_2)=TRANS/ZORIG,FA(PLN1_DCC)D(A3_DCC1_3)=ROTATE/ZAXIS,FA(LIN1),XDIRD(A3_DCC1_4)=TRANS/YORIG,FA(LIN1)D(A3_DCC1_5)=TRANS/XORIG,FA(PNT1)D(A3_DCC1)=TRANS/XORIG,0.0F(LIN1_DCC)=FEAT/LINE,UNBND,CART,2.2066,0,-0.2,1,0,0,0,-1,0MEAS/LINE,F(LIN1_DCC),6DMESW/COMAND,'移动/安全平面'PTMEAS/CART,2.2066,0,-0.2,0,-1,0PTMEAS/CART,2.6085,0,-0.2,0,-1,0PTMEAS/CART,3.7364,0,-0.2,0,-1,0PTMEAS/CART,5.1908,0,-0.2,0,-1,0PTMEAS/CART,6.4143,0,-0.2,0,-1,0PTMEAS/CART,7.1161,0,-0.2,0,-1,0终止测量RECALL/DA(STARTUP)DATDEF/FA(PLN1_DCC),DAT(A)D(A3_DCC2_1)=DATSET/DAT(A),ZDIRD(A3_DCC2_2)=TRANS/ZORIG,FA(PLN1_DCC)D(A3_DCC2_3)=ROTATE/ZAXIS,FA(LIN1_DCC),XDIRD(A3_DCC2_4)=TRANS/YORIG,FA(LIN1_DCC)D(A3_DCC2_5)=TRANS/XORIG,FA(PNT1)D(A3_DCC2)=TRANS/XORIG,0.0F(PNT1_DCC)=FEAT/POINT,CART,0,0.3715,-1.0652,-1,0,0MEAS/POINT,F(PNT1_DCC),1DMESW/COMAND,'移动/安全平面'PTMEAS/CART,0,0.3715,-1.0652,-1,0,0终止测量RECALL/DA(STARTUP)DATDEF/FA(PLN1_DCC),DAT(A)D(A3_DCC3_1)=DATSET/DAT(A),ZDIRD(A3_DCC3_2)=TRANS/ZORIG,FA(PLN1_DCC)D(A3_DCC3_3)=ROTATE/ZAXIS,FA(LIN1_DCC),XDIRD(A3_DCC3_4)=TRANS/YORIG,FA(LIN1_DCC)D(A3_DCC3_5)=TRANS/XORIG,FA(PNT1_DCC)D(A3_DCC3)=TRANS/XORIG,0.0
DMESW/COMAND,'数组结束/标识=DCC_ALIGN'
文档 否,.. STEP 2) Measure the circle... If you have a CAD model use an AUTO CIRCLE and select the FIXED_RAD best fit math type... If you do not have a CAD model, teach a measured circle and then F9 to edit.. Change the best fit math type to FIXED RAD and key in the correct nominal information. for X, Y, Z, I, J, K and DIAMETER. Select "Regenerate Hit Targets" and click OK. . When prompted "Ok to equally space hits?" answer YES. Re-execute the feature (CTRL+E) to update the measured data.. 移动/安全平面
CIR1 =特征/触测/圆/默认,直角坐标,外,固定半径理论值/<3.8786,-5.7328,0>,<0,0,1>,19.9409,0实际值/<3.8658,-5.7313,0>,<0,0,1>,19.9409,0目标值/<3.8786,-5.7328,0>,<0,0,1>起始角=56.3083,终止角=105.0113角矢量=<1,0,0>方向=逆时针显示特征参数=否显示相关参数=否
文档 否,.. STEP 3) Dimension the FIXED RAD circle to report the location of the radius.
DIM LOC1= 圆 的位置CIR1 单位=英寸 ,$
图示=关 文本=关 倍率=10.00 输出=两者 半角=否
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
X 3.8786 0.0040 -0.0040 3.8658 -0.0128 0.0088 <--------
Y -5.7328 0.0040 -0.0040 -5.7313 0.0015 0.0000 ------#--
终止尺寸 LOC1
文档 否,.. STEP 4) Create a new alignment and origin the relevant axes on the fixed rad circle.
A5 =坐标系/开始,回调:A3_DCC3,列表=是建坐标系/平移,X轴,CIR1建坐标系/平移,Y轴,CIR1坐标系/终止
文档 否,.. STEP 5) Measure the radiu.. If you have a CAD model, Pick a minumum of 3 Auto Vector Points exqually distributed across the radius... If you do not have a CAD model, Open the Parameter Settings Dialog F10 . Select the Probing Tab and . enable polar compensation for the active workplane. Then measure a minium of 3 Points exqually . distributed across the radius... Execute your points..移动/安全平面
PNT2 =特征/触测/矢量点/默认,直角坐标理论值/<-1.9342,9.7811,-0.2>,<-0.1939966,0.9810022,0>实际值/<-1.9252,9.7861,-0.2039>,<-0.1939966,0.9810022,0>目标值/<-1.9342,9.7811,-0.2>,<-0.1939966,0.9810022,0>捕捉=否显示特征参数=否显示相关参数=否移动/安全平面
PNT3 =特征/触测/矢量点/默认,直角坐标理论值/<1.0415,9.9159,-0.2>,<0.1044596,0.9945291,0>实际值/<1.0427,9.9113,-0.2001>,<0.1044596,0.9945291,0>目标值/<1.0415,9.9159,-0.2>,<0.1044596,0.9945291,0>捕捉=否显示特征参数=否显示相关参数=否移动/安全平面
PNT4 =特征/触测/矢量点/默认,直角坐标理论值/<5.1854,8.516,-0.2>,<0.5200707,0.8541232,0>实际值/<5.1939,8.5123,-0.1994>,<0.5200707,0.8541232,0>目标值/<5.1854,8.516,-0.2>,<0.5200707,0.8541232,0>捕捉=否显示特征参数=否显示相关参数=否
文档 否,... STEP 6) Dimension the individual points using Location dimension and select the "Prad" check. box (Polar Radius). This will verify the size of the radius..
DIM LOC2= 点 的位置PNT2 单位=英寸 ,$
图示=关 文本=关 倍率=10.00 输出=两者 半角=否
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
极半径 9.9705 0.0040 -0.0040 9.9736 0.0032 0.0000 --------#
终止尺寸 LOC2
DIM LOC3= 点 的位置PNT3 单位=英寸 ,$
图示=关 文本=关 倍率=10.00 输出=两者 半角=否
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
极半径 9.9705 0.0040 -0.0040 9.9660 -0.0045 0.0005 <--------
终止尺寸 LOC3
DIM LOC4= 点 的位置PNT4 单位=英寸 ,$
图示=关 文本=关 倍率=10.00 输出=两者 半角=否
AX NOMINAL +TOL -TOL MEAS DEV OUTTOL
极半径 9.9705 0.0040 -0.0040 9.9718 0.0013 0.0000 -----#---
终止尺寸 LOC4
文档 否,.. Finally) If you are not using a CAD model. Do not forget to Open the Parameter Settings Dialog F10 . and turn off polar compensation.
这篇关于PC-DMIS 2019 SmallArcAnalysis(大半径小圆弧)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
![BUUCTF靶场[web][极客大挑战 2019]Http、[HCTF 2018]admin](https://i-blog.csdnimg.cn/direct/ed45c0efd0ac40c68b2c1bc7b6d90ebc.png)




![最简单的使用JDBC[连接数据库] mysql 2019年3月18日](https://i-blog.csdnimg.cn/blog_migrate/d10b0c37d5115bce2197b87d8034b833.png)
