本文主要是介绍串口UART模式中断收发数据——华大HC32F460,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、基础知识
二、代码实现
宏定义
串口初始化
定时器初始化
时钟初始化
相关中断回调函数
mian函数
三、问题
1.有个坑
四、结果
一、基础知识
USART1基地址为:0x4001_D000
USART2基地址为:0x4001_D400
USART3基地址为:0x4002_1000
USART4基地址为:0x4002_1400
引脚映射:华大HC32F460与STM32F10x的区别在于:HC32F460有64个引脚支持Fun32~63功能选择,即我们说的重映射,Fun32~63主要为串行通信功能(包含USART,SPI, I2C, I2S, CAN);分为了Fun_Grp1、Fun_Grp2。具体可看<数据手册-引脚功能表>。而STM32F10x的GPIO引脚重映射是有规定的,所以华大的用起来比较灵活。
接收超时定时器通道选择
TIMEOUT 计数器采用Timer0 模块的计数器,具体对应关系如下:
USART1:Timer0 Unit1 A 通道
USART2:Timer0 Unit1 B 通道
USART3:Timer0 Unit2 A 通道
USART4:Timer0 Unit2 B 通道
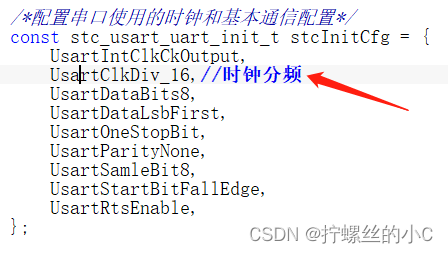
USART串口通信的基本参数配置为一致,也是最常用的模式
UsartIntClkCkOutput:时钟为内部时钟输出
UsartClkDiv_16:16分频
UsartDataBits8:8位数据位
UsartDataLsbFirst:低位在前
UsartOneStopBit:1位停止位
UsartParityNone:无奇偶校验
UsartSamleBit8:8位采样
UsartStartBitFallEdge:起始位检测下降沿
UsartRtsEnable:RTS允许
二、代码实现
本样例主要展示USART外设配置为USART外设配置为UART模式时通过中断方式收发数据。
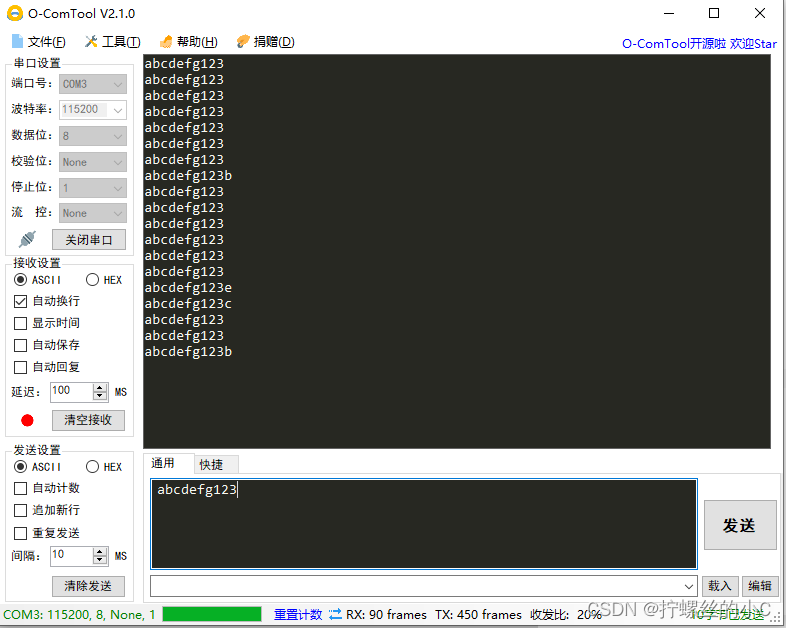
串口助手软件配置端口参数:
波特率:115200
数据位:8
校验位:None
停止位:1
宏定义
/* USART channel definition */
#define USART_CH (M4_USART4)
/* USART baudrate definition */
#define USART_BAUDRATE (115200ul)
/* USART Interrupt Number */
#define USART_RX_IRQn (Int000_IRQn)
#define USART_ERR_IRQn (Int001_IRQn)
#define USART_RTO_IRQn (Int002_IRQn)
#define USART_TX_IRQn (Int003_IRQn)
#define USART_CMP_IRQn (Int004_IRQn)
/* USART RX Port/Pin definition */
#define USART_RX_PORT (PortE)
#define USART_RX_PIN (Pin14)
#define USART_RX_FUNC (Func_Usart4_Rx)#define USART_TX_PORT (PortE)
#define USART_TX_PIN (Pin15)
#define USART_TX_FUNC (Func_Usart4_Tx)/* USART interrupt number */
#define USART_RI_NUM (INT_USART4_RI)
#define USART_EI_NUM (INT_USART4_EI)
#define USART_RTO_NUM (INT_USART4_RTO)
#define USART_TI_NUM (INT_USART4_TI)
#define USART_TCI_NUM (INT_USART4_TCI)#define set Ok
#define reset Error#define ENCODER_LEN 6static uint16_t u16RxData;串口初始化
/*串口初始化*/
void UART_Init(void)
{en_result_t enRet = Ok;stc_irq_regi_conf_t stcIrqRegiCfg;/*配置串口使用的时钟和基本通信配置*/const stc_usart_uart_init_t stcInitCfg = {UsartIntClkCkOutput,UsartClkDiv_16,//时钟分频UsartDataBits8,UsartDataLsbFirst,UsartOneStopBit,UsartParityNone,UsartSamleBit8,UsartStartBitFallEdge,UsartRtsEnable,};/*打开时钟*/PWC_Fcg1PeriphClockCmd(PWC_FCG1_PERIPH_USART4, Enable);/*配置相应的IO作为串口的RX引脚*/PORT_SetFunc(USART_TX_PORT, USART_TX_PIN, USART_TX_FUNC, Disable);PORT_SetFunc(USART_RX_PORT, USART_RX_PIN, USART_RX_FUNC, Disable);/*初始化串口配置*/enRet = USART_UART_Init(USART_CH, &stcInitCfg);while (enRet != Ok);/*串口波特率设置*/enRet = USART_SetBaudrate(USART_CH, USART_BAUDRATE);while (enRet != Ok);/*设置串口接收中断*/stcIrqRegiCfg.enIRQn = USART_RX_IRQn;stcIrqRegiCfg.pfnCallback = &Usart4RxIrqCallback;stcIrqRegiCfg.enIntSrc = USART_RI_NUM;enIrqRegistration(&stcIrqRegiCfg);NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);/*设置串口接收错误中断*/stcIrqRegiCfg.enIRQn = USART_ERR_IRQn; /* 中断号,可通过参考手册查阅对应的中断号 */stcIrqRegiCfg.pfnCallback = &Usart4ErrIrqCallback; /* 中断回调函数 */stcIrqRegiCfg.enIntSrc = USART_EI_NUM; /* 错误中断向量号,可通过参考手册查阅对应的中断号*/enIrqRegistration(&stcIrqRegiCfg);NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);/* 配置中断优先级 */NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn); /*先清一下这个中断的标志位(置零)*/NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn); /*在使能这个中断*//*设置接收超时中断*/stcIrqRegiCfg.enIRQn = USART_RTO_IRQn; /* 中断号,可通过参考手册查阅对应的中断号 */stcIrqRegiCfg.pfnCallback = &Usart4TimeoutIrqCallback; /* 中断回调函数 */stcIrqRegiCfg.enIntSrc = INT_USART4_RTO; /* 错误中断向量号,可通过参考手册查阅对应的中断号*/enIrqRegistration(&stcIrqRegiCfg);NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT); /* 配置中断优先级 */NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn); /*先清一下这个中断的标志位(置零)*/NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn); /*在使能这个中断*//*设置串口发送中断*/stcIrqRegiCfg.enIRQn = USART_TX_IRQn; /* 中断号,可通过参考手册查阅对应的中断号 */stcIrqRegiCfg.pfnCallback = &UsartTxIrqCallback; /* 中断回调函数 */stcIrqRegiCfg.enIntSrc = USART_TI_NUM; /* 错误中断向量号,可通过参考手册查阅对应的中断号*/enIrqRegistration(&stcIrqRegiCfg);NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT); /* 配置中断优先级 */NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn); /*先清一下这个中断的标志位(置零)*/NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn); /*在使能这个中断*//*设置串口发送完成中断*/stcIrqRegiCfg.enIRQn = USART_CMP_IRQn; /* 中断号,可通过参考手册查阅对应的中断号 */stcIrqRegiCfg.pfnCallback = &UsartTxCmpltIrqCallback; /* 中断回调函数 */stcIrqRegiCfg.enIntSrc = USART_TCI_NUM; /* 错误中断向量号,可通过参考手册查阅对应的中断号*/enIrqRegistration(&stcIrqRegiCfg);NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT); /* 配置中断优先级 */NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn); /*先清一下这个中断的标志位(置零)*/NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn); /*在使能这个中断*/USART_FuncCmd(USART_CH, UsartTx, Enable);//使能发送USART_FuncCmd(USART_CH, UsartRx, Enable);//使能接收USART_FuncCmd(USART_CH, UsartRxInt, Enable);//使能接收中断USART_FuncCmd(USART_CH, UsartTimeOut, Enable);//使能超时USART_FuncCmd(USART_CH, UsartTimeOutInt, Enable);//使能超时中断
}定时器初始化
/*usart timer0初始化*/
static void Usart_Timer0_Init(void)
{stc_clk_freq_t stcClkTmp;stc_tim0_base_init_t stcTimerCfg;stc_tim0_trigger_init_t StcTimer0TrigInit;MEM_ZERO_STRUCT(stcClkTmp);MEM_ZERO_STRUCT(stcTimerCfg);MEM_ZERO_STRUCT(StcTimer0TrigInit);/* Timer0 peripheral enable */PWC_Fcg2PeriphClockCmd(PWC_FCG2_PERIPH_TIM02, Enable);/* Clear CNTAR register for channel A */
// TIMER0_WriteCntReg(LCD_TMR_UNIT, Tim0_ChannelA, 0u);TIMER0_WriteCntReg(M4_TMR02, Tim0_ChannelB, 0u);/* Config register for channel A */stcTimerCfg.Tim0_CounterMode = Tim0_Async;stcTimerCfg.Tim0_AsyncClockSource = Tim0_XTAL32;stcTimerCfg.Tim0_ClockDivision = Tim0_ClkDiv8;stcTimerCfg.Tim0_CmpValue = 32000u;TIMER0_BaseInit(M4_TMR02, Tim0_ChannelB, &stcTimerCfg);/* Clear compare flag */TIMER0_ClearFlag(M4_TMR02, Tim0_ChannelB);/* Config timer0 hardware trigger */StcTimer0TrigInit.Tim0_InTrigEnable = false;StcTimer0TrigInit.Tim0_InTrigClear = true;StcTimer0TrigInit.Tim0_InTrigStart = true;StcTimer0TrigInit.Tim0_InTrigStop = false;TIMER0_HardTriggerInit(M4_TMR02, Tim0_ChannelB, &StcTimer0TrigInit);
}
时钟初始化
/*时钟初始化*/
static void ClkInit(void)
{stc_clk_xtal_cfg_t stcXtalCfg;stc_clk_mpll_cfg_t stcMpllCfg;en_clk_sys_source_t enSysClkSrc;stc_clk_sysclk_cfg_t stcSysClkCfg;MEM_ZERO_STRUCT(enSysClkSrc);MEM_ZERO_STRUCT(stcSysClkCfg);MEM_ZERO_STRUCT(stcXtalCfg);MEM_ZERO_STRUCT(stcMpllCfg);/* Set bus clk div. */stcSysClkCfg.enHclkDiv = ClkSysclkDiv1; /* Max 168MHz */stcSysClkCfg.enExclkDiv = ClkSysclkDiv2; /* Max 84MHz */stcSysClkCfg.enPclk0Div = ClkSysclkDiv1; /* Max 168MHz */stcSysClkCfg.enPclk1Div = ClkSysclkDiv2; /* Max 84MHz */stcSysClkCfg.enPclk2Div = ClkSysclkDiv4; /* Max 60MHz */stcSysClkCfg.enPclk3Div = ClkSysclkDiv4; /* Max 42MHz */stcSysClkCfg.enPclk4Div = ClkSysclkDiv2; /* Max 84MHz */CLK_SysClkConfig(&stcSysClkCfg);/* Switch system clock source to MPLL. *//* Use Xtal as MPLL source. */stcXtalCfg.enMode = ClkXtalModeOsc;stcXtalCfg.enDrv = ClkXtalLowDrv;stcXtalCfg.enFastStartup = Enable;CLK_XtalConfig(&stcXtalCfg);CLK_XtalCmd(Enable);/* MPLL config. */stcMpllCfg.pllmDiv = 1ul;stcMpllCfg.plln = 50ul;stcMpllCfg.PllpDiv = 4ul;stcMpllCfg.PllqDiv = 4ul;stcMpllCfg.PllrDiv = 4ul;CLK_SetPllSource(ClkPllSrcXTAL);CLK_MpllConfig(&stcMpllCfg);/* flash read wait cycle setting */EFM_Unlock();EFM_SetLatency(EFM_LATENCY_5);EFM_Lock();/* Enable MPLL. */CLK_MpllCmd(Enable);/* Wait MPLL ready. */while (Set != CLK_GetFlagStatus(ClkFlagMPLLRdy)){}/* Switch system clock source to MPLL. */CLK_SetSysClkSource(CLKSysSrcMPLL);
}相关中断回调函数
串口发送空中断,串口发送完成中断
串口接收中断,串口接收错误中断,串口接收超时中断
/*串口接收中断回调函数RX*/
static void Usart4RxIrqCallback(void)
{if (Set == USART_GetStatus(USART_CH, UsartRxNoEmpty)){u16RxData = USART_RecData(USART_CH);//取出数据buffer = u16RxData;USART_FuncCmd(USART_CH, UsartTx, Enable);USART_SendData(USART_CH, buffer);}
}/*串口接收错误中断回调函数RX ERR*/
static void Usart4ErrIrqCallback(void)
{if (Set == USART_GetStatus(USART_CH, UsartFrameErr)) USART_ClearStatus(USART_CH, UsartFrameErr);if (Set == USART_GetStatus(USART_CH, UsartParityErr)) USART_ClearStatus(USART_CH, UsartParityErr);if (Set == USART_GetStatus(USART_CH, UsartOverrunErr)) USART_ClearStatus(USART_CH, UsartOverrunErr);if (Set == USART_GetStatus(USART_CH, UsartRxNoEmpty)) USART_ClearStatus(USART_CH, UsartRxNoEmpty);if (Set == USART_GetStatus(USART_CH, UsartTxComplete)) USART_ClearStatus(USART_CH, UsartTxComplete);if (Set == USART_GetStatus(USART_CH, UsartTxEmpty)) USART_ClearStatus(USART_CH, UsartTxEmpty);if (Set == USART_GetStatus(USART_CH, UsartRxTimeOut)) USART_ClearStatus(USART_CH, UsartRxTimeOut);if (Set == USART_GetStatus(USART_CH, UsartRxMpb)) USART_ClearStatus(USART_CH, UsartRxMpb);
}/*串口接收超时中断回调RX TIMEOUT*/
static void Usart4TimeoutIrqCallback(void)
{TIMER0_Cmd(M4_TMR02, Tim0_ChannelB,Disable);USART_ClearStatus(USART_CH, UsartRxTimeOut);
}/*串口发送中断回调函数TX*/
static void UsartTxIrqCallback(void)
{USART_SendData(USART_CH, u16RxData);USART_FuncCmd(USART_CH, UsartTxEmptyInt, Disable); USART_FuncCmd(USART_CH, UsartTxCmpltInt, Enable);
}/*串口发送完成中断回调函数TX CAM*/
static void UsartTxCmpltIrqCallback(void)
{USART_FuncCmd(USART_CH,UsartTx,Disable);USART_FuncCmd(USART_CH,UsartTxCmpltInt,Disable);
}mian函数
static uint8_t u8RxData;int32_t main(void)
{//时钟初始化ClkInit();//串口初始化UART_Init();//定时器0初始化Usart_Timer0_Init();while(1){;}}三、问题
1.有个坑
USART的波特率需将串口时钟频率降低。
在我的代码里,波特率设置的USART_SetBaudrate的SetUartBaudrate里
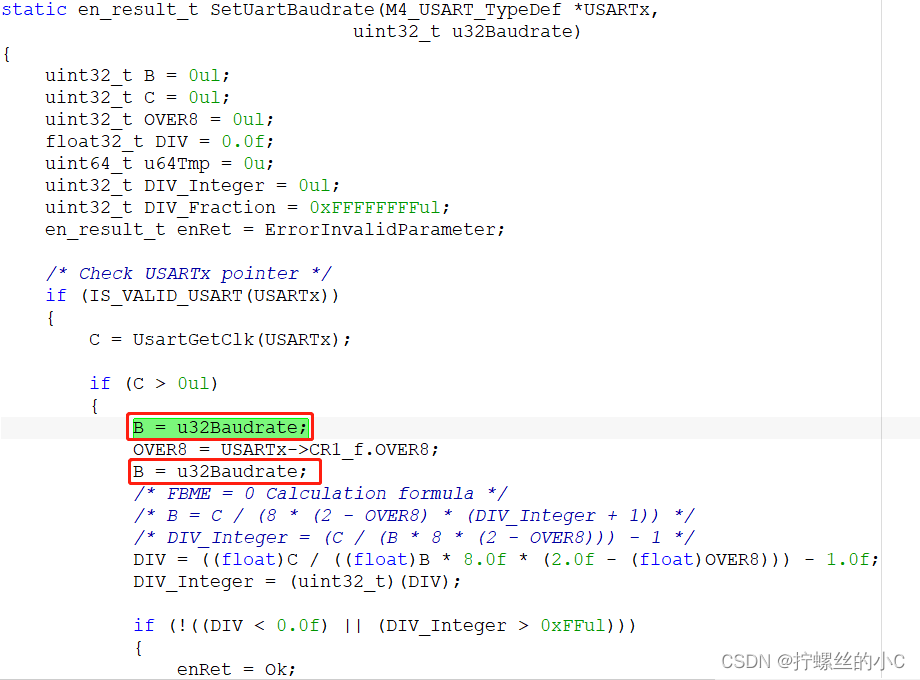
如果只有一个B = u32Baudrate;就会跳过???????
所以我多写了一个B = u32Baudrate;
防止代码在此发生错误
四、结果
这篇关于串口UART模式中断收发数据——华大HC32F460的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





