本文主要是介绍镭神智能CH32激光雷达在Ubuntu18.04系统下的配置(含静态IP设置),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
镭神智能CH32激光雷达在ROS端的配置(含静态IP设置)
- 设置静态IP地址
- 设置
- 验证
- 软件操作实例
本文作者将CH32安装在了轮趣(wheeltec)的小车上,用网线与主板 Jetson Xavier NX相连接,ubuntu版本为18.04,购买雷达附带的CH32手册配置教程较为简略,本文进行一个详细的步骤说明。
设置静态IP地址
设置
首先点击屏幕右上角的编辑连接,之后出现如下图所示的图片:
点击左下角“+”,创建以太网的连接类型,
因为激光雷达型号为CH32,因此命名及配置信息如下所示:


设置完成后,修改bashrc文件:
sudo gedit ~/.bashrc
将
export ROS_MASTER_URI=http://192.168.0.100:11311
export ROS_HOSTNAME=192.168.0.100
修改为:
export ROS_MASTER_URI=http://localhost:11311
export ROS_HOSTNAME=localhost
修改完成后,输入source ~/.bashrc,并重启激光雷达。
重启后,在系统屏幕右上角选择网络CH32连接,打开终端使用ifconfig,查看有线IP是否设置成功:
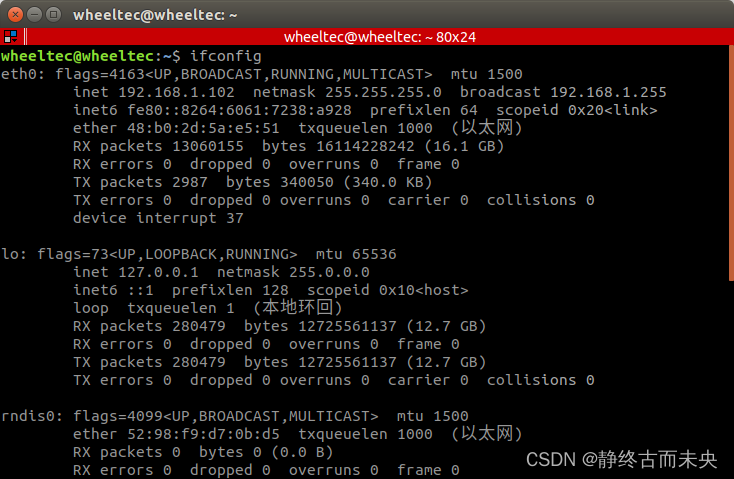
如图所示,eth0 中,IP地址为192.168.1.102,即为设置成功。
验证
方法一:
打开终端,输入ping 192.168.1.200(电脑IP设定为192.168.1.102,雷达IP为192.168.1.200)
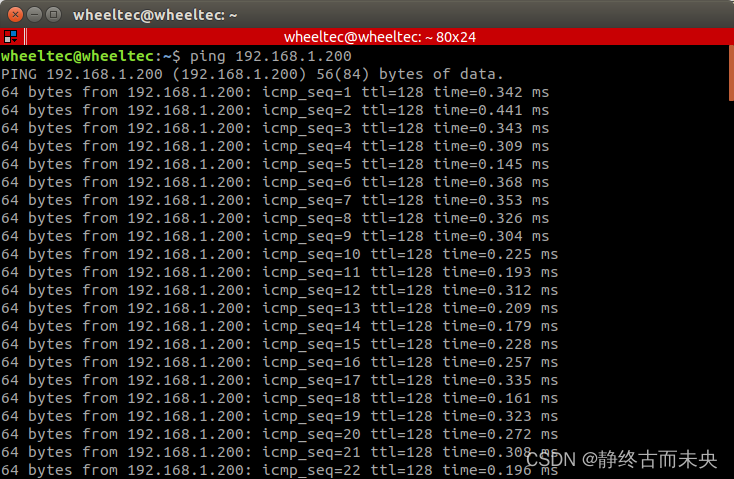
如上图所示,即为ping通,说明正常。
方法二:
输入:
sudo tcpdump -n -i eth0
eth0为有线网络设备名,可用ifconfig查看网络名称。
若没有安装, tcpdump ,则使用命令安装:
sudo apt-get install tcpdump
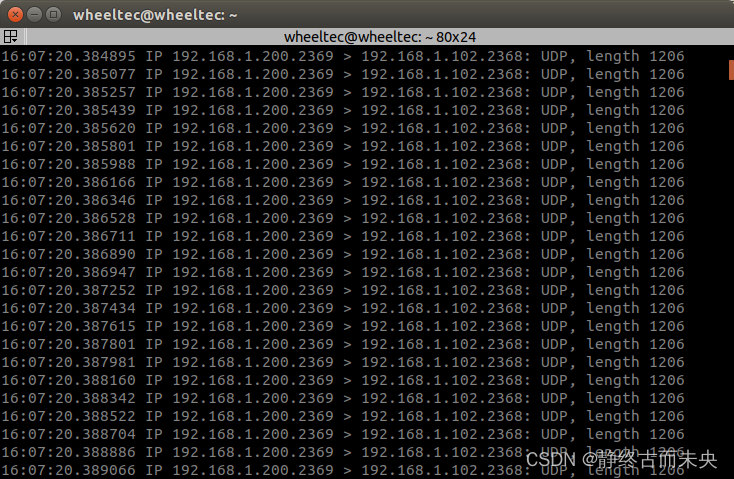
如图显示,雷达发送到目的端数据包为1206个字节,表示数据发送正常。
软件操作实例
1.建立操作空间,构建编译环境
mkdir -p ~/lslidar_ws/src
cd ~/lslidar_ws/src
工作空间可以任意命名。
2.下载雷达驱动
将附带的驱动程序拷入到新建立的工作空间src下,并解压。
3.编译打包
cd ~/lslidar_ws
sudo apt-get install libpcap-dev ###安装libcap
catkin_make
4.运行程序
source ~/lslidar_ws/devel/setup.bash
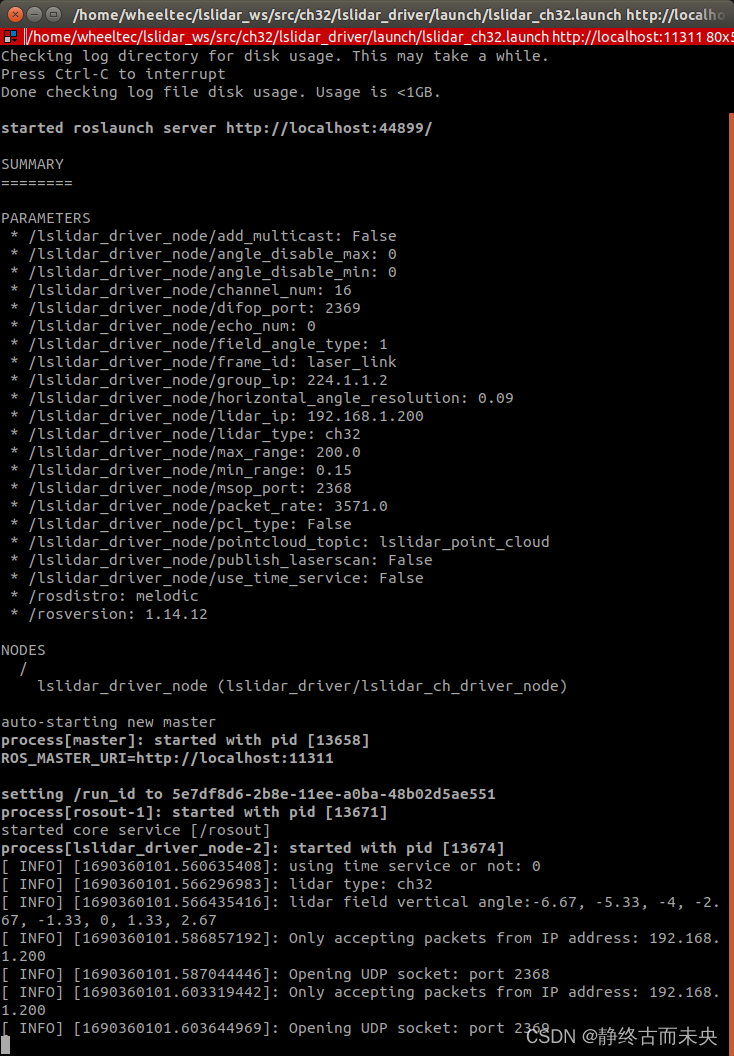
roslaunch lslidar_driver lslidar_ch32.launch
输入命令后,显示如图所示:
新建一个终端,输入:rviz
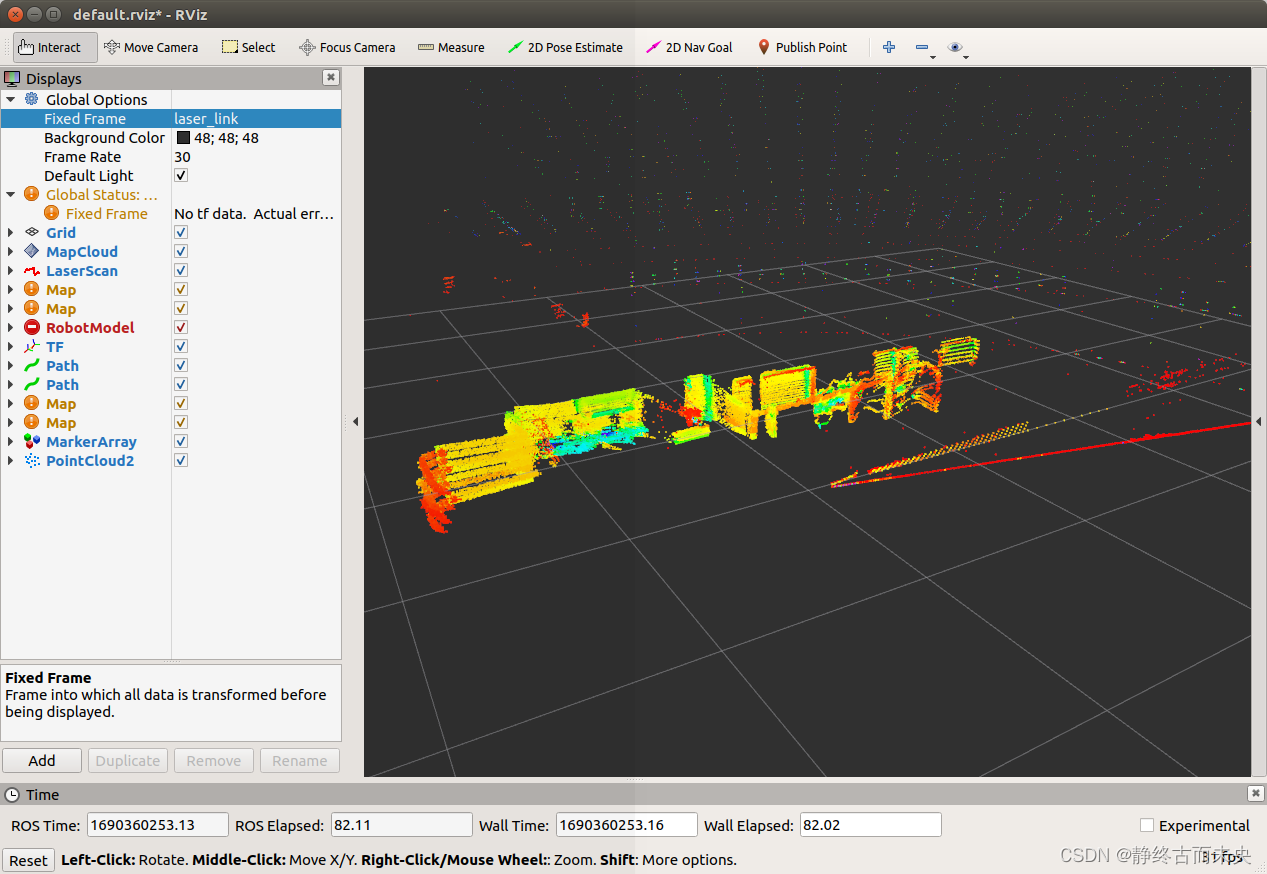
5.显示雷达检测到的数据
效果如图所示:
这篇关于镭神智能CH32激光雷达在Ubuntu18.04系统下的配置(含静态IP设置)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




