本文主要是介绍UWB 技术在机器人和移动领域的应用题】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
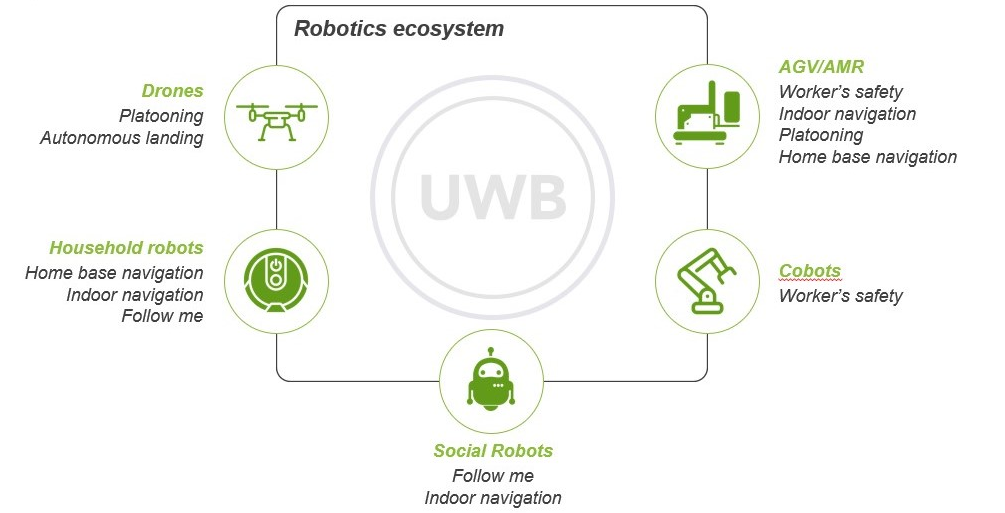
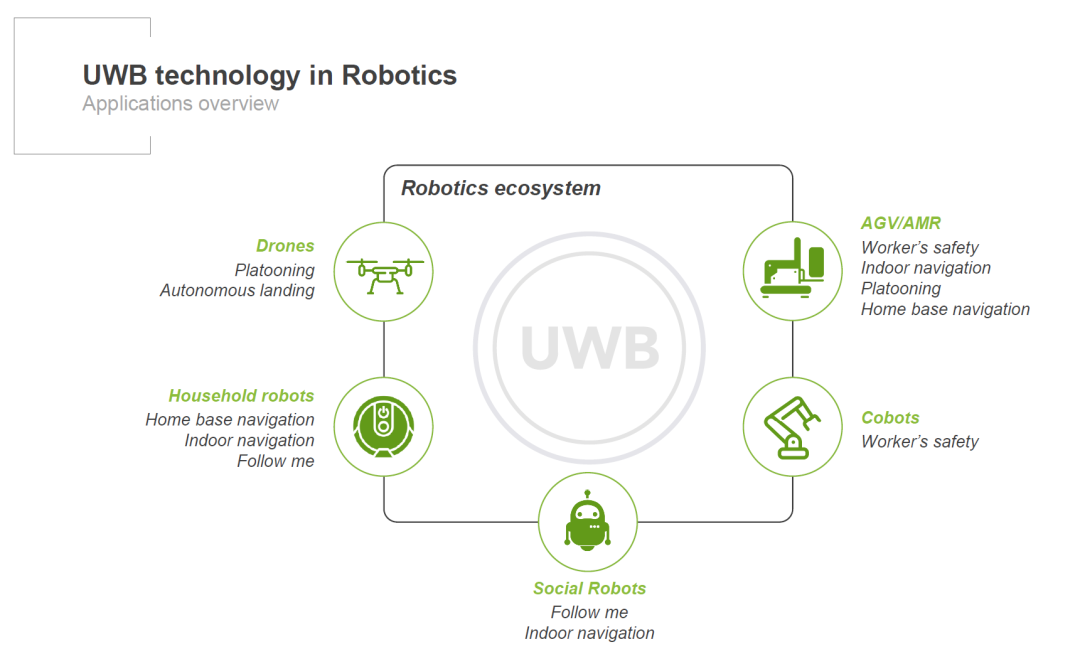
多年来,机器人生态系统不断增长,不同的应用程序也在不断增长。如今,机器人出现在许多不同的领域,例如私人家庭、商业场所、仓库和医疗场所。他们要么自主工作,要么与我们并肩工作,帮助我们完成任务。
根据 Statista 1 的数据,预计 2023 年机器人市场总收入将达到 373.7 亿美元左右,该市场以服务机器人为主(约占收入的 75%)。这个巨大的市场由工业物联网、边缘计算、5G、人工智能和智能移动等多种趋势塑造,并受到家庭/社交机器人、自主移动机器人(AMR)、协作机器人(Cobot)和无人机等各种应用的推动。

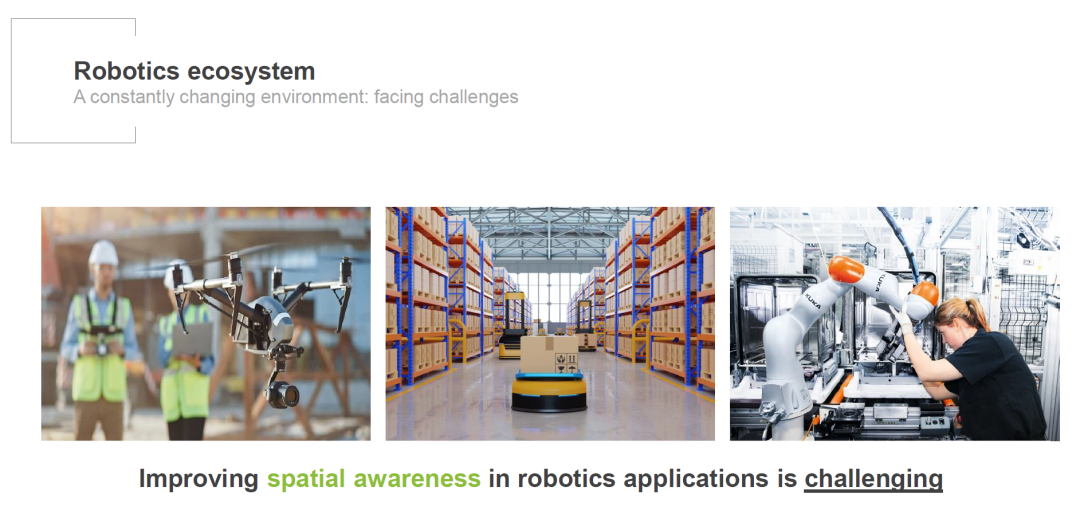
提高机器人应用中的空间意识可能非常具有挑战性,但对于支持机器人的操作至关重要。事实上,机器人的功能和能力近年来不断发展:新的应用程序和用例已经出现,机器人现在需要自主行驶并以多种不同的方式与人互动。
-
自主着陆:
-
物流中的有效负载交付(无人机)
-
悬停并降落在室内地面站(无人机)
-
盒子里的无人机用例(无人机)
-
-
列队行驶:
-
仓库多有效负载交付(AGV/AMR)
-
飞行蜂窝网络(无人机)
-
环境监测(无人机)
-
娱乐(空中表演)(无人机)
-
-
工人安全:
-
如果工人处于危险区域,请停止机器(AGV/AMR、协作机器人)
-
让机器人与附近工人保持安全距离(AGV/AMR、协作机器人)
-
-
跟我来
-
在工业环境中移动的重负载(AGV/AMR)
-
个人协助机器人(社交机器人)
-
-
基地导航
-
电量耗尽返回充电站(AGV/AMR、家用机器人)
-
完成任务后返回储藏室(AGV/AMR、家用机器人)
-
-
室内导航
-
工业和家庭环境中的精确自主导航(AGV/AMR、家用机器人)
-
-
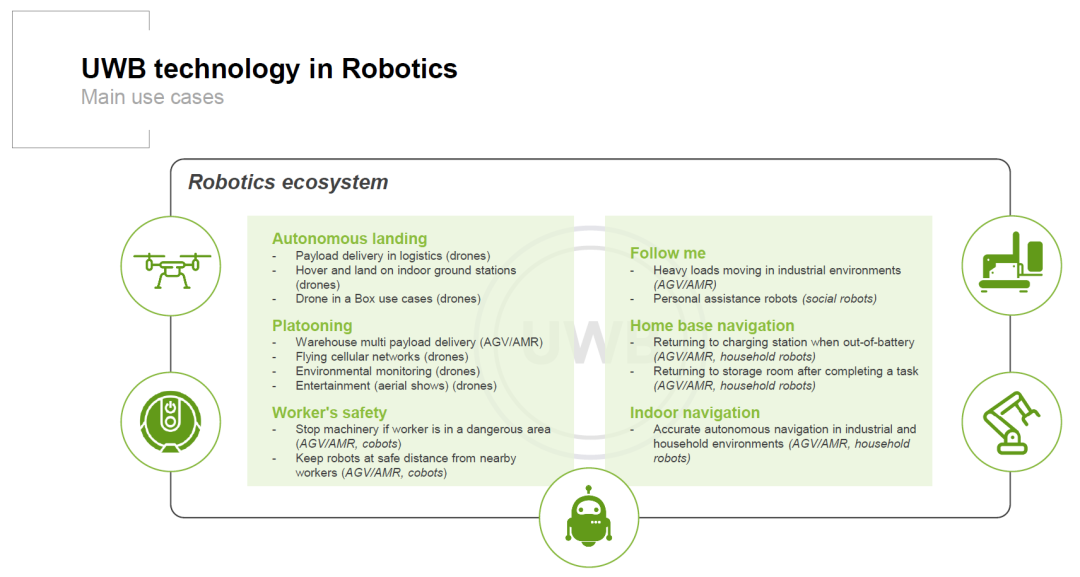
跟随我:在此用例中,机器人在操作环境中移动时,需要跟随人类或另一个机器人。集成此功能对于个人辅助机器人或在工业环境中移动的重负载至关重要。
-
家庭基站导航:在此用例中,机器人需要自主导航到特定位置或家庭基站。例如,当电池耗尽时,它可以返回充电站,或者在完成任务后返回储藏室。
-
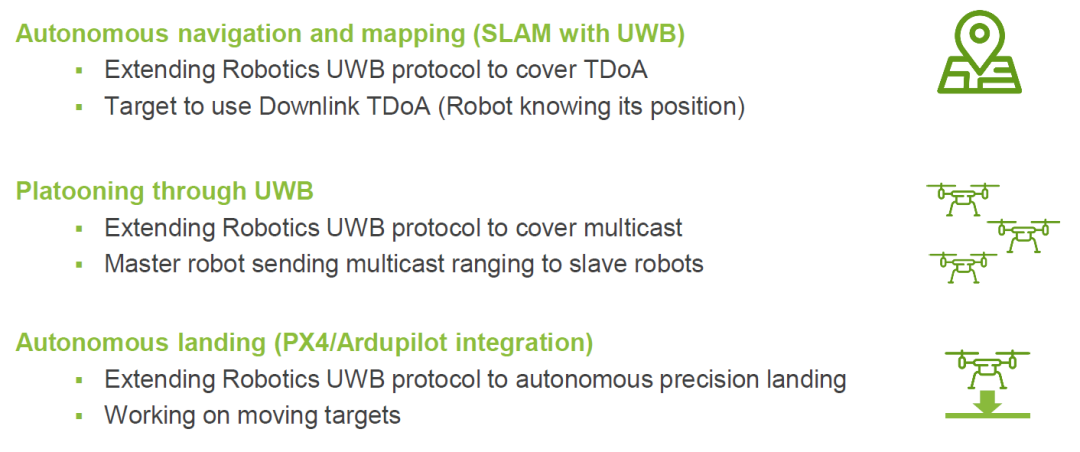
室内导航:为了执行分配的任务,机器人需要相对于环境定位自己,并自主导航到家庭或工业环境中的一个或多个目标位置。在无法使用GPS的室内环境中,UWB提供了可扩展、实时且准确的定位技术,可以让机器人准确地知道自己每时每刻的位置。
-
自主着陆:飞行机器人或无人机有望自主工作。这项任务的关键是它们能够在静态或移动平台上精确着陆。这使得物流中的有效负载交付、室内地面站上的悬停和着陆以及盒中无人机用例等用例成为可能。
-
编队:机器人可能需要一起工作,有一个领导者来领导它们,甚至以特定的编队工作才能实现目标。这在仓库多有效负载交付、飞行蜂窝网络和娱乐(例如无人机空中表演)方面有着巨大的应用。
-
工人的安全:当工人在危险的机器人或机器附近操作时,安全至关重要。机器人可以检测附近的工人,并在不满足安全条件时采取适当行动;例如,如果检测到工人处于危险区域,则停止操作,或者始终使机器人与附近工人保持安全距离。
如何将UWB 子系统集成到最常见的机器人操作系统(ROS2、PX4 等)中
UWB技术移动应用
-
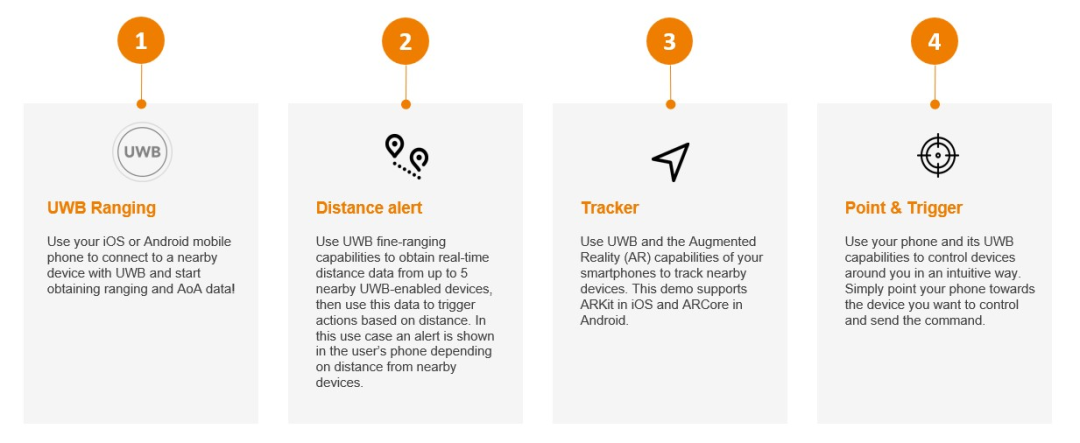
UWB 测距:使用您的 iOS 或 Android 手机连接到附近带有 UWB 的设备,并开始获取测距和迎角数据!
-
距离警报:使用 UWB 精细测距功能从附近最多 5 个支持 UWB 的设备获取实时距离数据,然后使用该数据根据距离触发操作。在此用例中,根据与附近设备的距离,用户的手机中会显示警报。
-
跟踪器:使用智能手机的 UWB 和增强现实 (AR) 功能来跟踪附近的设备。该演示支持 iOS 中的 ARKit 和 Android 中的 ARCore。
-
Point & Trigger:使用您的手机及其 UWB 功能以直观的方式控制您周围的设备。只需将手机指向您要控制的设备并发送命令即可。
借助 UWB 技术,您将获得准确、实时的定位信息,可用于预测您的需求并自动执行操作,而不会影响安全性。将安全汽车访问、免提逻辑和物理访问以及室内定位提升到一个新的水平!
这篇关于UWB 技术在机器人和移动领域的应用题】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




