本文主要是介绍零基础无实物一步一步学PLCS7-1200仿真(十)-两个1200单边S7通信,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
项目要求:通过S7通信,完成PLC1的开关按下后,PL2的LED灯点亮。
项目目的:学习通信基本原理,通信相关的指令。
项目功能:通过S7通信,主CPU只有启动按钮,从CPU只有灯。主CPU操作点击启动按钮后,从CPU通过通信收到指令,点亮其控制的灯。
完成了基本指令的学习,让我们来学习一下通信。S7-1200系列的CPU具备了网络通信的功能。本项目来源于西门子自动化挑战赛,信息化网络化赛道。通过最简单的S7通信,最简单的编程学习PLC 通信的原理。
一、硬件电路
硬件电路非常简单,借鉴之前的电动控制电路。这里特殊强调一下PLC的型号要选1215系列的CPU。这个系列的CPU有两个profinet接口,在做编程调试时候会非常方便。
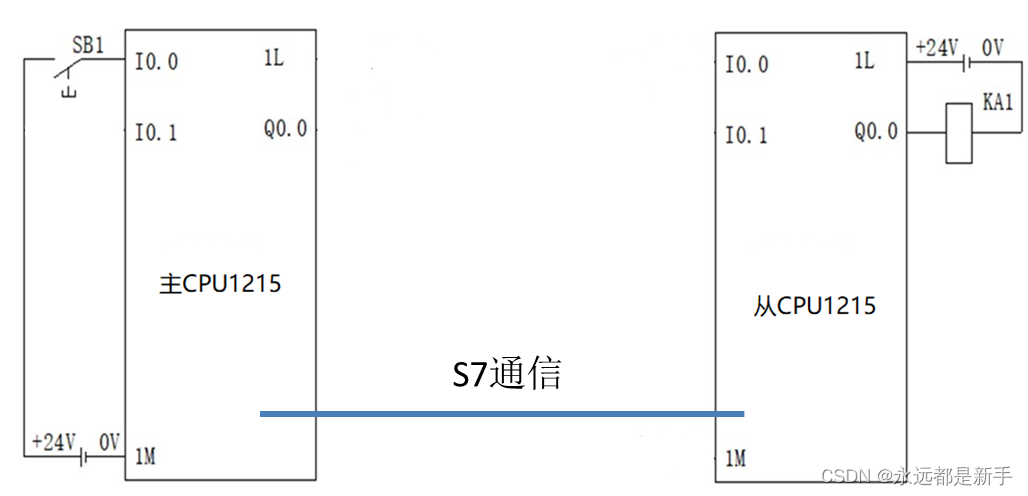
如项目要求,图中左边主CPU只连接了一个输入按钮,图中右边从CPU只连接了一个输出继电器。项目最终效果是手动按下左边的按钮,主CPU检测到输入的按钮之后通过通讯线,将指令传给从CPU,CPU通过通信线接收到指令后,控制自身的输出给继电器的线圈通电。
二、PLC程序
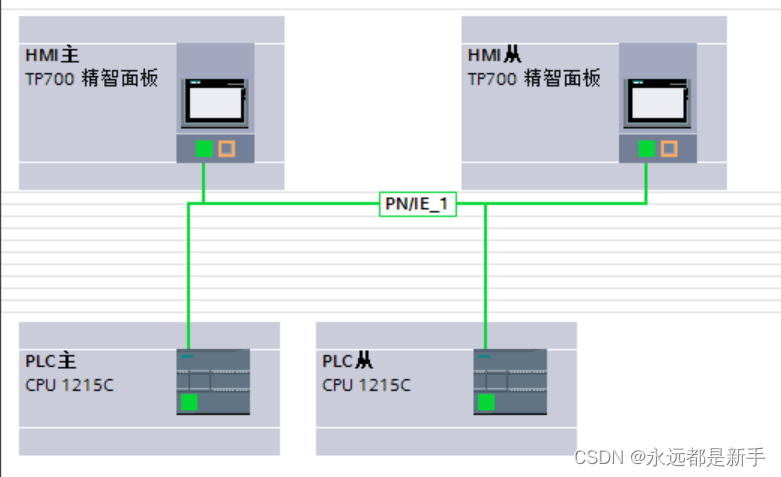
想要通信,需要将通信线连接好,将2个PLC和2个HMI触摸屏通过网线连接起来构成网络。
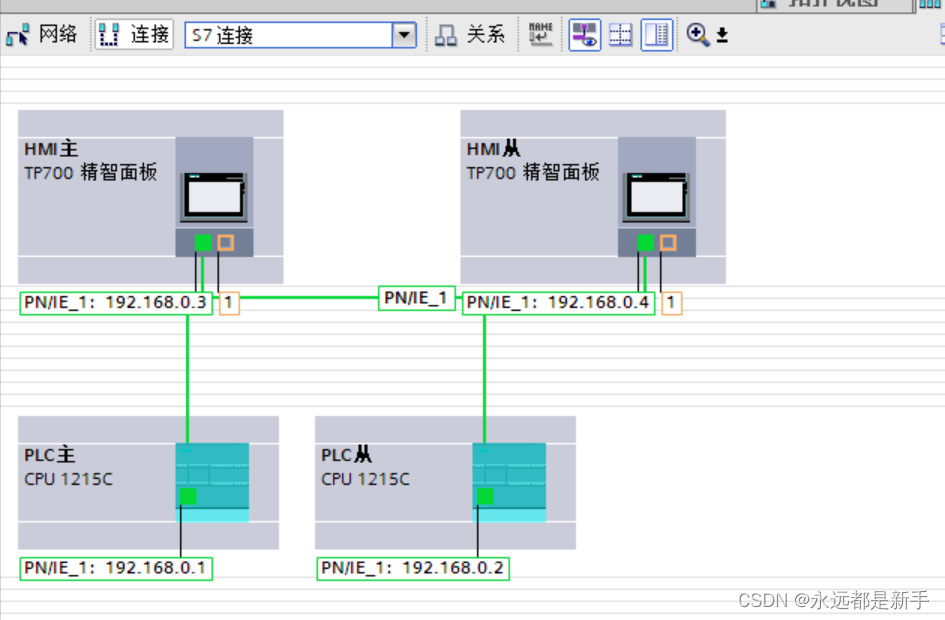
组网时候需要对每个CPU的IP地址和要通信的IP地址进行设置配对。
之后,就可以进行PLC的变成了。主CPU程序如下:
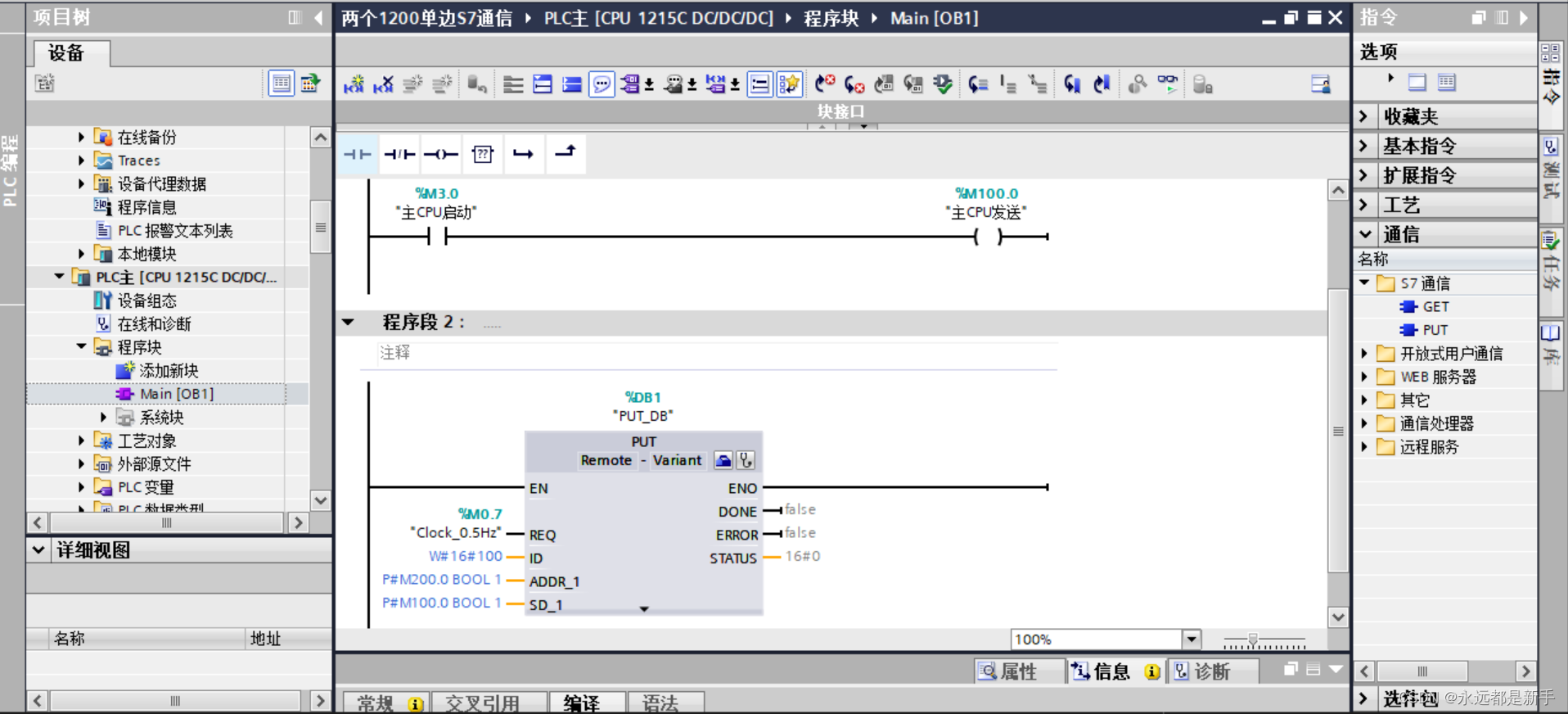
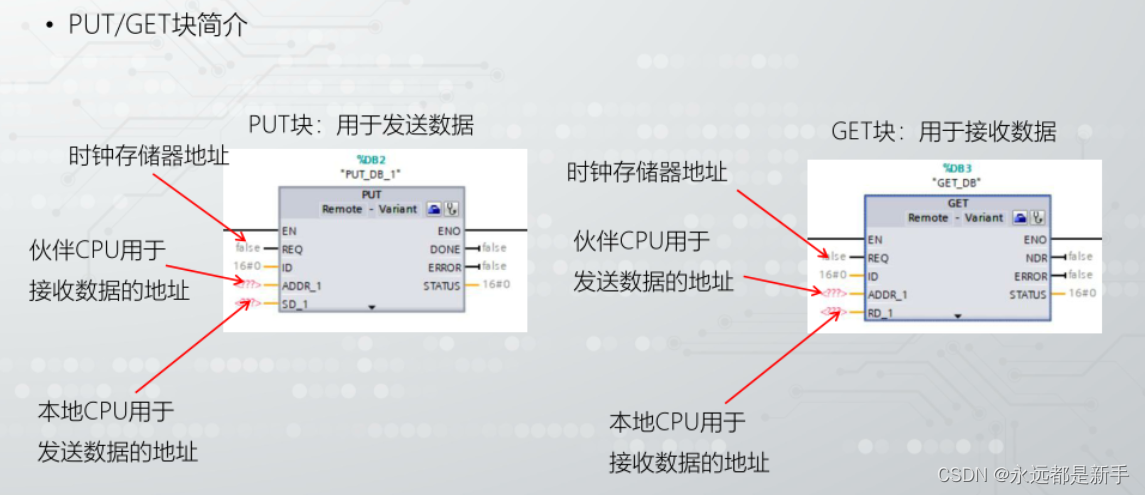
S7通信使用的是右侧指令中的通信类指令,选择S7通信,本项目中使用其中的PUT和GET指令,PUT为发送用在主CPU中,GET为接收用在从CPU中。
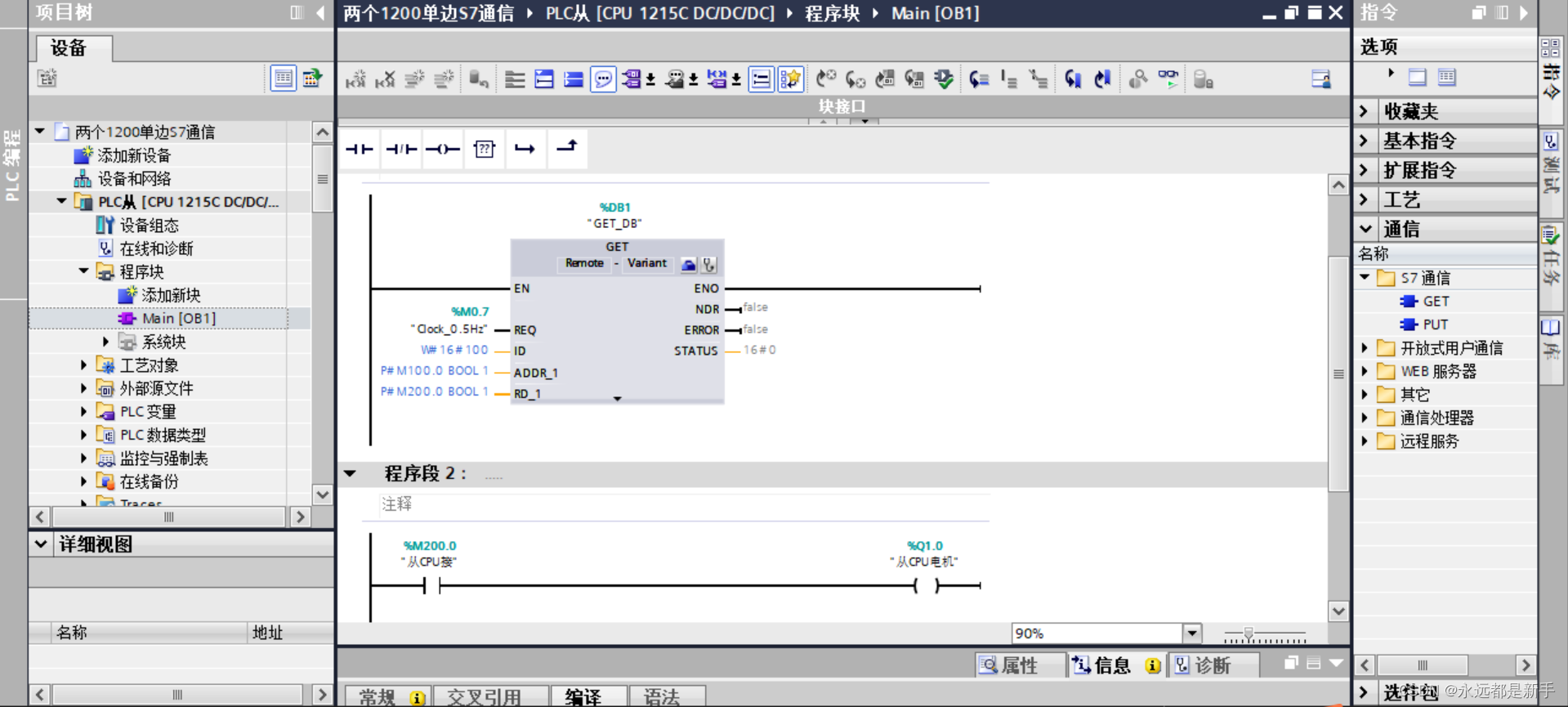
从CPU的程序如下:
三、PLC和HMI联动仿真效果
笔者还没试验出来如何能仿真多个HMI画面,故只能主CPU仿真HMI画面,从CPU打开PLC程序进行在线监测。同时手动操作主CPU端的按钮,观察从CPU的输出状态,可以看到点击按钮后和响应会有一定的延迟,这是正常的,这种通信方式必然要比本地一个PLC的控制要快。笔者在实物的试验过程中也发现按下一个实体按钮后,从CPU响应的速度确实跟仿真的效果一样有一定的延迟。
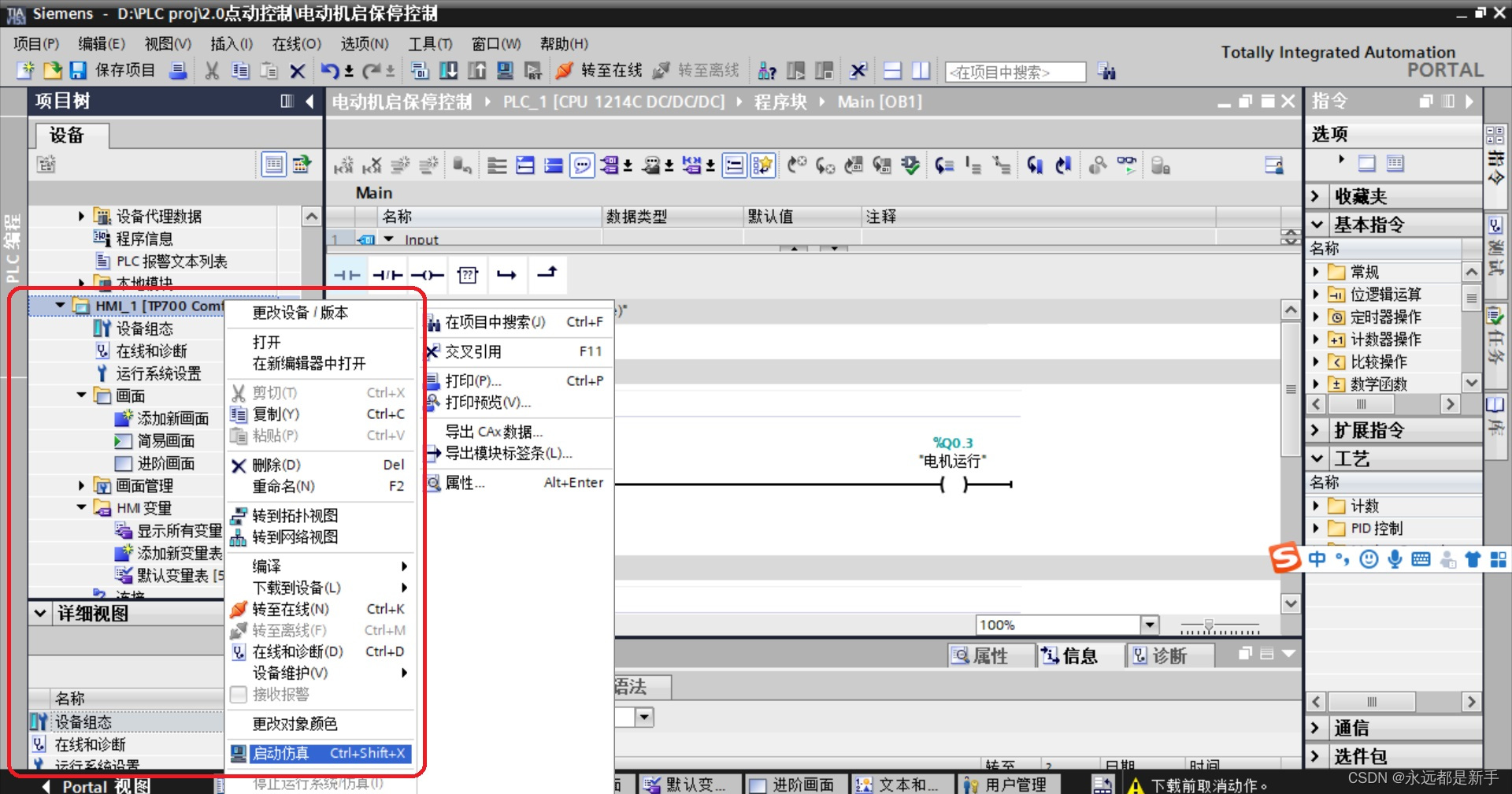
程序使用说明:下载压缩包后,直接打开程序按照如下步骤操作。分别在PLC程序和HMI程序上右键点击启动仿真,即可在弹出的仿真界面点击按钮查看仿真效果。

仿真程序下载请点击下方链接:
https://download.csdn.net/download/m0_57441179/87355087
这篇关于零基础无实物一步一步学PLCS7-1200仿真(十)-两个1200单边S7通信的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






