本文主要是介绍安防监控项目---web网页通过A9控制Zigbee终端节点的风扇,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- 一、zigbee的CGI接口
- 二、请求线程和硬件控制
- 三、现象展示
- 总结
前言
书接上期,我们可以看一下前面的功能设计的部分,网页端的控制还有一个,那就是通过网页来控制zigbee上的风扇节点,这部分的工作量是相当大的,既要实现HTML发送控制命令到A9平台进行接收,又要实现A9平台串口通信控制zigbee协调器,通过zigbee协调器控制zigbee终端节点(这一步是建立在zigbee协调器和终端节点调试好的基础上的);最终呢实现网页控制zigbee节点,这也实现了无线控制!
一、zigbee的CGI接口
第一步呢还是先来看命令字是怎样下发的:
#include <stdio.h>
#include "cgic.h"
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <unistd.h>
#include <stdio.h>
#include <errno.h>
#include <sys/ipc.h>
#include <sys/msg.h>#define N 8
struct msg
{long type;long msgtype;unsigned char text[N];
};
int cgiMain()
{ key_t key;char buf[N];char sto_no[2];int msgid;struct msg msg_buf;memset(&msg_buf,0,sizeof(msg_buf));cgiFormString("fan",buf,N);cgiFormString("store",sto_no,2);if((key = ftok("/tmp", 'g')) < 0){perror("ftok");exit(1);}if((msgid = msgget(key, 0666)) < 0){perror("msgget");exit(1);}bzero (msg_buf.text, sizeof (msg_buf.text));switch (buf[0]){case '0':{msg_buf.text[0] = (0 << 6) | (2 << 4) | (0 << 0);break;}case '1':{msg_buf.text[0] = (0 << 6) | (2 << 4) | (1 << 0);break;}}msg_buf.type = 1L;msg_buf.msgtype = 4L;msgsnd(msgid, &msg_buf,sizeof(msg_buf)-sizeof(long),0);sto_no[0] -= 48;cgiHeaderContentType("text/html\n\n"); fprintf(cgiOut, "<HTML><HEAD>\n"); fprintf(cgiOut, "<TITLE>My CGI</TITLE></HEAD>\n"); fprintf(cgiOut, "<BODY>"); fprintf(cgiOut, "<H2>send sucess</H2>");//fprintf(cgiOut, "<a href='.html'>返回</a>"); fprintf(cgiOut, "<meta http-equiv=\"refresh\" content=\"1;url=../a9_zigbee%d.html\">", sto_no[0]);fprintf(cgiOut, "</BODY>\n"); fprintf(cgiOut, "</HTML>\n"); return 0;
}
这里呢我也没有给出过多的注释,其实流程和前面的led和beep的代码基本一致,且框架结构也都一致;这就是一个好的框架所带来的优势,使得开发起来比较容易;
二、请求线程和硬件控制
请求线程只需要在switch…case语句中添加控制类型即可;这里控制的流程直接写在了switch中,也可以将其写在单独的处理线程中;这里用到了Linux下的串口编程,所以需要包含头文件linuxuart.h这个头文件;
#include "data_global.h"
#include "linuxuart.h"//消息队列id
extern int msgid;
//ipc对象键值
extern key_t key;
//锁资源
extern pthread_mutex_t mutex_client_request,mutex_refresh,mutex_sqlite,mutex_transfer,mutex_analysis,mutex_sms,mutex_buzzer,mutex_led,mutex_camera;
//条件变量
extern pthread_cond_t cond_client_request,cond_refresh,cond_sqlite,cond_transfer,cond_analysis,cond_sms,cond_buzzer,cond_led,cond_camera;
//模块的控制命令字
extern unsigned char cmd_led;
extern unsigned char cmd_buzzer;
extern unsigned char cmd_fan;//GPRS模块的电话号
extern char recive_phone[12] ;
extern char center_phone[12] ;//消息队列通信结构体
struct msg msgbuf;void *pthread_client_request(void *arg)
{if((key = ftok("/tmp",'g')) < 0){perror("ftok failed .\n");exit(-1);}msgid = msgget(key,IPC_CREAT|IPC_EXCL|0666); //检测消息队列中是否有这个键值,如果有则返回对应的-1,没有则创建并返回创建消息队列的idif(msgid == -1) {if(errno == EEXIST){ //如果已经存在msgid = msgget(key,0777); //设置权限为0777}else{perror("fail to msgget");exit(1);}}printf("pthread_client_request\n");while(1){bzero(&msgbuf,sizeof(msgbuf)); //清理操作,但一般使用memset,功能更加强大一点printf("wait form client request...\n"); msgrcv (msgid, &msgbuf, sizeof (msgbuf) - sizeof (long), 1L, 0); //从消息队列中读取消息printf ("Get %ldL msg\n", msgbuf.msgtype); //打印消息类型printf ("text[0] = %#x\n", msgbuf.text[0]); //打印消息内容//判断消息类型,从而确定是哪一个设备switch(msgbuf.msgtype){case 1L://1L的类型是led的消息类型,此时上锁,等待消息内容也就是控制命令字复制完成后解锁,通过pthread_cond_signal唤醒pthread_led.c这个led线程,进行led的具体硬件操作pthread_mutex_lock(&mutex_led);printf("hello led\n");cmd_led = msgbuf.text[0];pthread_mutex_unlock(&mutex_led);pthread_cond_signal(&cond_led);break;case 2L://2L表示beep的消息类型//这里呢相信大家天赋异禀,看懂了上面led的,beep也不是问题pthread_mutex_unlock(&mutex_buzzer);printf("hello beep1\n");pthread_mutex_lock(&mutex_buzzer);cmd_buzzer = msgbuf.text[0];pthread_mutex_unlock(&mutex_buzzer);pthread_cond_signal(&cond_buzzer);break;case 3L:pthread_mutex_lock(&mutex_led);printf("hello seg\n");cmd_seg = msgbuf.text[0];pthread_mutex_unlock(&mutex_led);pthread_cond_signal(&cond_led);break;case 4L:pthread_mutex_lock(&mutex_sqlite);printf("hello fan\n");cmd_fan = msgbuf.text[0];int fan_fd = open_port("/dev/ttyUSB0"); //打开设备if(fan_fd < 0){printf("open failed\n");}set_com_config(fan_fd, 115200, 8, 'N', 1); //设置串口参数char cmdbuf[4] = {0};if(cmd_fan == 0x21){strcpy(cmdbuf,"1\n"); //注意点,一定要加上\n,因为串口助手是默认添加\n的,所以这里我们需要手动添加write(fan_fd,cmdbuf,sizeof(cmdbuf)/sizeof(cmdbuf[0]));sleep(2);}if(cmd_fan == 0x20){strcpy(cmdbuf,"0\n");write(fan_fd,cmdbuf,sizeof(cmdbuf)/sizeof(cmdbuf[0]));sleep(2);}char buf[32] = {0};//get data from zigbeeread(fan_fd,&buf,sizeof(buf));printf("sizeof(buf) = %d.\n",sizeof(buf));printf(">>>>>>%s\n",buf);sleep(1);pthread_mutex_unlock(&mutex_sqlite);break;default:break;}}
}
#endif
接下来看一下linux下的串口编程,为什么要学习这个呢,其实就是要通过USB去和zigbee模块通信,那么无非就是设置通信速率,校验位,停止位等这些参数:
先看一下linuxuart.h文件:
#ifndef __LINUX_UART_H_
#define __LINUX_UART_H_#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>#include <termios.h>
#include <string.h>
#include "data_global.h"extern int set_com_config(int fd, int baud_rate, int data_bits, char parity, int stop_bits);
extern int open_port(char *com_port);
extern void USB_UART_Config(char* path, int baud_rate);
#endif
再来看一下linuxuatr.c文件:
#include "linuxuart.h"int set_com_config(int fd, int baud_rate, int data_bits, char parity, int stop_bits)
{struct termios new_cfg, old_cfg;int speed;/*保存原有串口配置*/if (tcgetattr(fd, &old_cfg) != 0){perror("tcgetattr");return -1;}new_cfg =old_cfg;/*配置为原始模式*/cfmakeraw(&new_cfg);new_cfg.c_cflag &= ~CSIZE;/*设置波特率*/switch (baud_rate){case 2400:{speed = B2400;break; }case 4800:{speed = B4800;break;}case 9600:{speed = B9600;break;}case 19200:{speed = B19200;break;}case 38400:{speed = B38400;break;}default:case 115000:{speed = B115200;break;}}cfsetispeed(&new_cfg, speed);cfsetospeed(&new_cfg, speed);/*设置数据位*/switch (data_bits){case 7:{new_cfg.c_cflag |= CS7;break;} default: case 8:{new_cfg.c_cflag |= CS8;break;}}/*设置奇偶校验位*/switch (parity){default:case 'n':case 'N':{new_cfg.c_cflag &= ~PARENB;new_cfg.c_iflag &= ~INPCK;break;}case 'o':case 'O':{new_cfg.c_cflag |= (PARODD |PARENB);new_cfg.c_iflag |= INPCK;break;}case 'e':case 'E':{new_cfg.c_cflag |= PARENB;new_cfg.c_cflag &= ~PARODD;new_cfg.c_iflag |= INPCK;break;}case 's':case 'S':{new_cfg.c_cflag &= ~PARENB;new_cfg.c_cflag &= ~CSTOPB;break;}}/*设置停止位*/switch (stop_bits){default:case 1:{new_cfg.c_cflag &= ~CSTOPB;break;} case 2:{new_cfg.c_cflag |= CSTOPB;break;}}/*设置等待时间和最小接收字符*/new_cfg.c_cc[VTIME] = 0;new_cfg.c_cc[VMIN] = 1;tcflush(fd, TCIFLUSH);if ((tcsetattr(fd, TCSANOW, &new_cfg)) != 0){perror("tcsetattr");return -1;}return 0;
}int open_port(char *com_port)
{int fd;/*打开串口*/fd = open(com_port, O_RDWR|O_NOCTTY|O_NDELAY);if (fd < 0){perror("open serial port");return -1;}/*恢复串口阻塞状态*/if (fcntl(fd, F_SETFL, 0) < 0){perror("fcntl F_SETFL\n");}/*判断是否为终端设备*/if (isatty(fd) == 0){perror("This is not a terminal device");}return fd;
}/*--------------------CH340Ƥ׃---------------------------*/
void USB_UART_Config(char* path, int baud_rate)
{int fd;fd = open_port(path);if(fd < 0){printf("open %s failed\n",path);return ;}if (set_com_config(fd, baud_rate, 8, 'N', 1) < 0){perror("set_com_config");return ;}close(fd);return ;
}
这些函数是不是挺熟悉的,其实就是我们经常使用的串口助手呗!软件化了,没有图形化界面了!
三、现象展示
风扇静止的时候如下:
下图是风扇转动起来的图片:
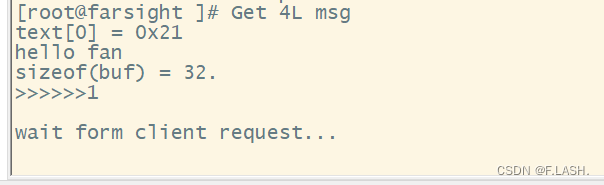
下图是终端显示的控制命令字:
打开显示:
关闭显示:
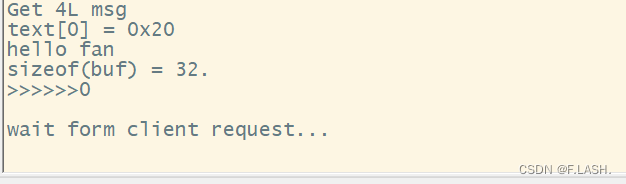
这里也可以看出跟代码信息是一致的;消息类型是4L,控制命令字为0x21和0x20;且打印信息也正确;
总结
本期的分享就到这里结束了,需要注意的是zigbee大家必须先调整好,保证其正常工作,进而学习Linux串口编程,再将这些融合到项目中,就能够实现网页控制zigbee终端节点硬件了;最后,各位小伙伴们如果有收获,可以点赞收藏哦,你们的认可是我创作的动力,一起加油!
这篇关于安防监控项目---web网页通过A9控制Zigbee终端节点的风扇的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




