本文主要是介绍驾驶车辆扣分,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
驾驶车辆扣分


这个答案是一年
1、假一就是提供假材料申领驾驶证的,一年内不得报考。2、吊二就是吊销驾驶证后两年内不得报考。3、撤三指的是被撤销驾驶证的,三年内不得报考。4、醉五指的是醉驾被吊销驾照的,五年内不得报考。5、逃终身指的是交通肇事逃逸的,终身不能报考驾驶证。
我又看了一下,确实有假一,我弄错了。我把假一和撤三弄混了。现在说一下假一和撤三的区别:假一,申请人在考试过程中有贿赂、舞弊行为的,取消考试资格,一年内不得再次申领机动车驾驶证。
而撤三,是说你拿到驾照之后,被发现以前是通过作弊、贿赂等手段拿到的驾照,这时候执法部门会撤销你的驾照,并且三年内不得再次申领机动车驾驶证。
假一 :是交虚假材料考驾照被发现,一年后不得重新申请
吊二 :是在被吊销驾驶证后 ,二年内不得重新申请
撤三 :是在被撤销驾驶证后 ,三年内不得重新申请
逃终生:发生车祸事故逃逸的 ,终生不得重新申请

城市快速路
城市快速路,属于快速路的一种,也是快速公路的主体,位居城市道路四个等级中的顶端。城市道路中设有中央分隔带,具有双向四车道以上的规模、全部或部分采用立体交叉与控制出入、供车辆以较高速度行驶的道路。主要作用是保证汽车畅通连续地行驶,提高城市内部的运输效率。
11



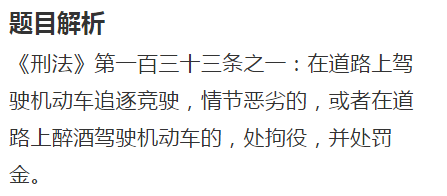



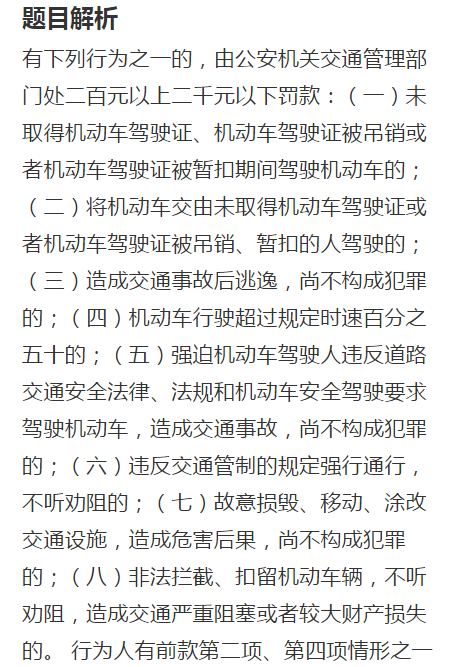




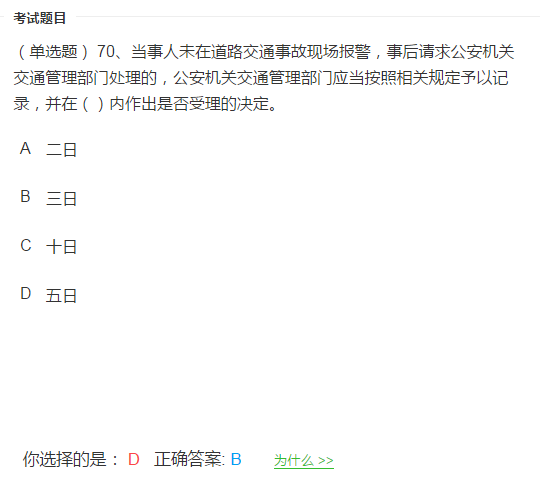
《中华人民共和国道路交通安全法》第九十一条 饮酒后驾驶机动车的,处暂扣六个月机动车驾驶证,并处一千元以上二千元以下罚款。因饮酒后驾驶机动车被处罚,再次饮酒后驾驶机动车的,处十日以下拘留,并处一千元以上二千元以下罚款,吊销机动车驾驶证。
根据我国国家标准化管理委员会发布的《车辆驾驶人员血液、呼气酒精含量阈值与检验》,
饮酒驾车:血液中酒精含量达到20-80mg/100ml。
醉酒驾车:血液中酒精含量大于80mg/100ml。
醉酒驾车的,会被吊销驾驶证,5年内不得重新取得驾驶证;还会触犯危险驾驶罪,可能被处以拘役、并处罚金。





这篇关于驾驶车辆扣分的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









