本文主要是介绍ROS使用cv::waitKey()对程序进行 暂停/开始的注意事项,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
cv::waitKey()函数的作用为延迟显示
当k>0时,作用为延迟显示(单位为ms)
cvWaitKey(k);//延迟 /ms当k=0时,作用为阻塞。
cvWaitKey(0);//阻塞
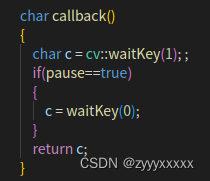
想通过cv::waitKey()配合ROS spIn进行控制暂停开始操作的话,需要注意,请将cvWaitKey设置在回调函数中(如下图),否则只能进行暂停,无法开始(因为waitkey导致程序一直阻塞在一处,无法在进行后续赋值操作)。
这篇关于ROS使用cv::waitKey()对程序进行 暂停/开始的注意事项的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





