本文主要是介绍AT32固件库外设使用,ArduinoAPI接口移植,模块化,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 一、ArduinoAPI移植
- 一、通用定时器使用
- 1.计时
- 1.
- 2.ETR外部时钟计数
- 4.ArduinoAPI - timer
- 三、ADC
- 1.ADC初始化(非DMA)
- 2.ADC_DMA 规则通道扫描
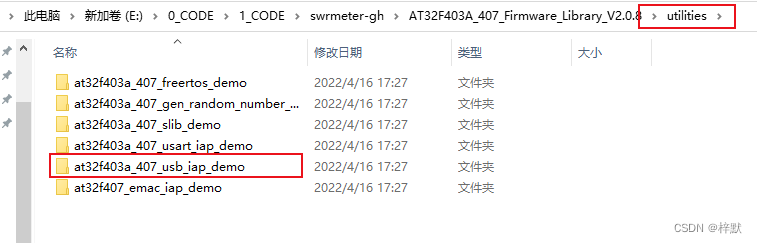
- 六、USB HID IAP
- 1.准备好Bootloader和app
- 2.配置好时钟,一定要打开USB
- 3.将生成的时钟配置复制到bootloader和app对应位置
- 4 设置bootloader和app的起始位置
- 5 使用IAP Programmer下载,地址要设置为app地址
一、ArduinoAPI移植
通过arduinoapi实现封装,实现底层分离,支持arduino生态,
通过固件库模块化外设,由ArduinoAPI调用
参考FastShift的封装方式,由于F403A固件库升级,底层需要重新封装
一、通用定时器使用
1.计时
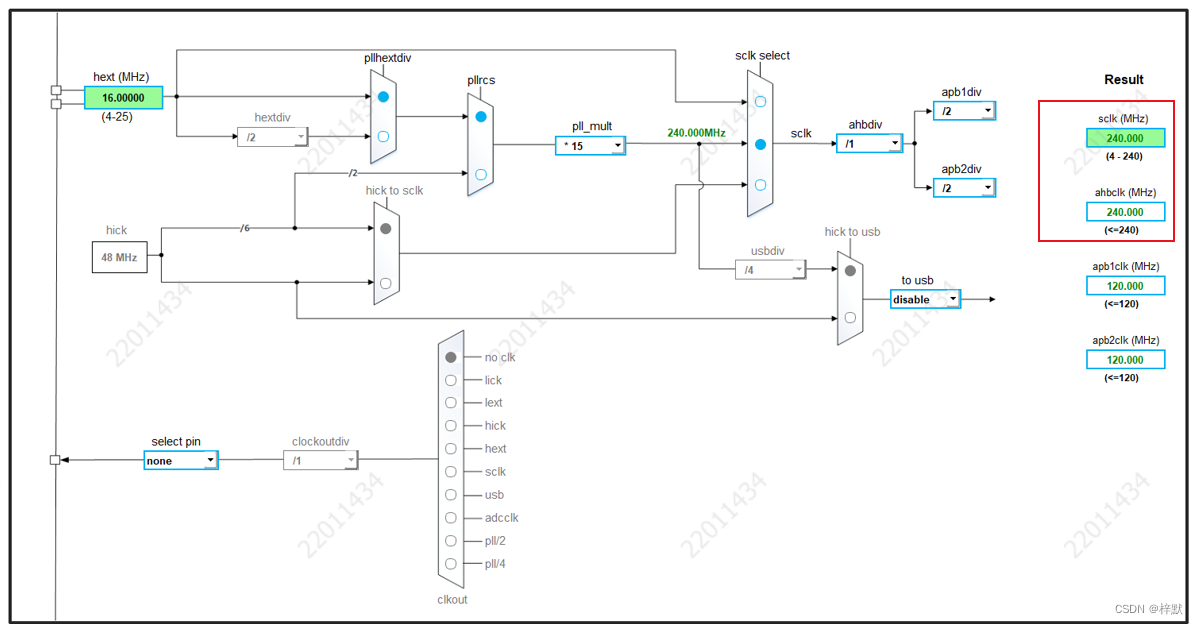
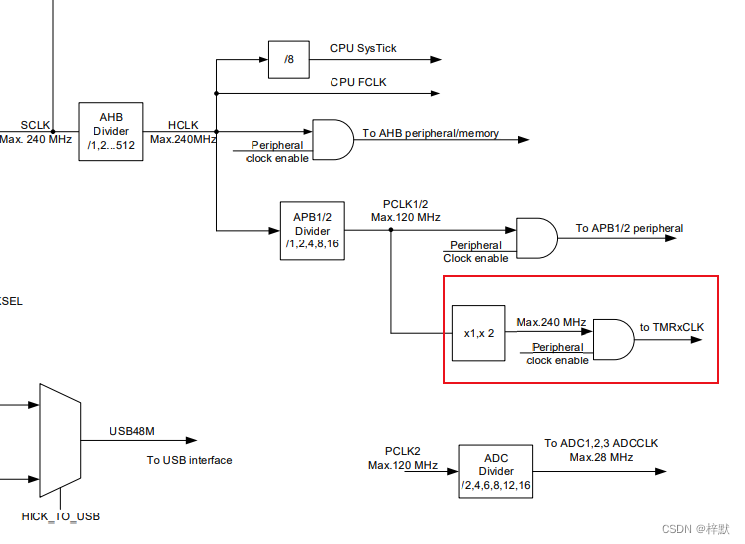
由图可以看出AHB时钟为240M
定时器时钟为240M
时间计算
Tout= ((arr+1)(psc+1))/Tclk;
Tclk:TIM3的输入时钟频率(单位为MHz)。
Tout:TIM3溢出时间(单位为us)。
例:计时1ms,输入时钟频率为240MHz。
arr = 239,psc = 999。
Tout = ((arr+1)(psc+1))/Tclk = ((239+1) *(240+1))/240=1000(us)=1(ms)
void trm3_int_init(u16 arr, u16 psc)
{/* enable tmr1 clock */crm_periph_clock_enable(CRM_TMR3_PERIPH_CLOCK, TRUE);tmr_base_init(TMR3, arr, psc);tmr_cnt_dir_set(TMR3, TMR_COUNT_UP);tmr_interrupt_enable(TMR3, TMR_OVF_INT, TRUE);/* tmr1 overflow interrupt nvic init */nvic_priority_group_config(NVIC_PRIORITY_GROUP_0);nvic_irq_enable(TMR3_GLOBAL_IRQn, 1, 0);/* enable tmr3 */tmr_counter_enable(TMR3, TRUE);
}void TMR3_GLOBAL_IRQHandler(void)
{ TMR3->ists = 0;;lv_tick_inc(1);
}
1.
2.ETR外部时钟计数
对于外部脉冲(方波)计数,通用的方法为捕获比较方式,由于项目对于脉冲的精度要求比较高,在快速搭建代码测试过后,发现该方法并不能满足需求,进而寻求计数更为精确的方法----ETR计数。
定时器实际就是一个计数器
可选内部、外部、内部触发输入用作计数时钟
即使用外部触发ETR作为计数器触发源
参考https://blog.csdn.net/u010650845/article/details/81781670
4.ArduinoAPI - timer
void Timer_SetInterrupt(TIM_TypeDef* TIMx, uint32_t Time, Timer_CallbackFunction_t Function)
{uint16_t period = 0;uint16_t prescaler = 0;uint32_t clock = TIMER_GET_CLOCK_MAX(TIMx);if(!IS_TMR_ALL_PERIPH(TIMx) || Time == 0){return;}/*将定时中断时间转换为重装值和时钟分频值*/Timer_TimeFactorization(Time,clock,&period,&prescaler);/*定时中断配置*/Timer_SetInterruptBase(TIMx,period,prescaler,Function,TIMER_PREEMPTIONPRIORITY_DEFAULT,TIMER_SUBPRIORITY_DEFAULT);
}三、ADC
1.ADC初始化(非DMA)
/*** @brief ADC 配置* @param ADCx: ADC地址* @retval 无*/
void ADCx_Init(adc_type* ADCx)
{adc_base_config_type adc_base_struct;if(ADCx == ADC1){crm_periph_clock_enable(CRM_ADC1_PERIPH_CLOCK, TRUE);}else if(ADCx == ADC2){crm_periph_clock_enable(CRM_ADC2_PERIPH_CLOCK, TRUE);}else if(ADCx == ADC3){crm_periph_clock_enable(CRM_ADC3_PERIPH_CLOCK, TRUE);}else{return;}/* select combine mode */adc_combine_mode_select(ADC_INDEPENDENT_MODE);adc_base_default_para_init(&adc_base_struct);adc_base_struct.sequence_mode = FALSE;adc_base_struct.repeat_mode = FALSE;adc_base_struct.data_align = ADC_RIGHT_ALIGNMENT;adc_base_struct.ordinary_channel_length = 1;adc_base_config(ADCx, &adc_base_struct);adc_resolution_set(ADCx, ADC_RESOLUTION_12B);adc_ordinary_conversion_trigger_set(ADCx, ADC_ORDINARY_TRIG_TMR1CH1, ADC_ORDINARY_TRIG_EDGE_NONE);adc_dma_mode_enable(ADCx, FALSE);adc_dma_request_repeat_enable(ADCx, FALSE);adc_interrupt_enable(ADCx, ADC_OCCO_INT, FALSE);adc_enable(ADCx, TRUE);while(adc_flag_get(ADCx, ADC_RDY_FLAG) == RESET);/* adc calibration */adc_calibration_init(ADCx);while(adc_calibration_init_status_get(ADCx));adc_calibration_start(ADCx);while(adc_calibration_status_get(ADCx));}/*** @brief 获取 ADC 值* @param ADCx: ADC地址* @param ADC_Channel: ADC通道* @retval 无*/
uint16_t ADCx_GetValue(adc_type* ADCx, uint16_t ADC_Channel)
{
#if 0adc_ordinary_channel_set(ADCx, (adc_channel_select_type)ADC_Channel, 1, ADC_SAMPLETIME_47_5);adc_ordinary_software_trigger_enable(ADCx, TRUE);while(!adc_flag_get(ADCx, ADC_OCCE_FLAG));
#endifreturn adc_ordinary_conversion_data_get(ADCx);}
2.ADC_DMA 规则通道扫描
通道注册API
pinMode(PWR_FWD_L_Pin, INPUT_ANALOG_DMA);pinMode(PWR_FWD_M_Pin, INPUT_ANALOG_DMA);pinMode(PWR_RET_L_Pin, INPUT_ANALOG_DMA);pinMode(PWR_RET_M_Pin, INPUT_ANALOG_DMA);
pinMode会调用ADC_DMA_Register
/*** @brief 注册需要DMA搬运的ADC通道* @param ADC_Channel:ADC通道号* @retval 见ADC_DMA_Res_Type*/
ADC_DMA_Res_Type ADC_DMA_Register(uint8_t ADC_Channel)
{
#if 1/*初始化ADC通道列表*/static bool isInit = false;if(!isInit){uint8_t i;for(i = 0; i < ADC_DMA_REGMAX; i++){ADC_DMA_RegChannelList[i] = 0xFF;}isInit = true;}/*是否是合法ADC通道*/if(!IS_ADC_CHANNEL(ADC_Channel))return ADC_DMA_RES_NOT_ADC_CHANNEL;/*是否已在引脚列表重复注册*/if(ADC_DMA_SearchChannel(ADC_Channel) != -1)return ADC_DMA_RES_DUPLICATE_REGISTRATION;/*是否超出最大注册个数*/if(ADC_DMA_RegCnt >= ADC_DMA_REGMAX)return ADC_DMA_RES_MAX_NUM_OF_REGISTRATIONS_EXCEEDED;/*写入注册列表*/ADC_DMA_RegChannelList[ADC_DMA_RegCnt] = ADC_Channel;/*注册个数+1*/ADC_DMA_RegCnt++;
#endifreturn ADC_DMA_RES_OK;
}
ADC_DMA_Init函数必须放到所有ADC_DMA引脚注册完之后
/**
* @brief ADC DMA 配置 配置ADC和对应DMA,固定ADC1 如果不需要DMA则使用ADCx_Init函数* 需要放到初始化最后,或者所有ADC_DMA引脚注册完之后* @param 无* @retval 无*/
void ADC_DMA_Init(void)
{uint8_t index;dma_init_type dma_init_structure;adc_base_config_type adc_base_struct;/*CLOCK CONFIG*/crm_periph_clock_enable(CRM_ADC1_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_DMA1_PERIPH_CLOCK, TRUE);/*INTERUPT COFIG*/nvic_irq_enable(DMA1_Channel1_IRQn, 0, 0);/*DMA CONFIG*/dma_reset(DMA1_CHANNEL1);dma_default_para_init(&dma_init_structure);dma_init_structure.buffer_size = ADC_DMA_RegCnt;dma_init_structure.direction = DMA_DIR_PERIPHERAL_TO_MEMORY;dma_init_structure.memory_base_addr = (uint32_t)ADC_DMA_ConvertedValue;dma_init_structure.memory_data_width = DMA_MEMORY_DATA_WIDTH_HALFWORD;dma_init_structure.memory_inc_enable = TRUE;dma_init_structure.peripheral_base_addr = (uint32_t) (&(ADC1->odt));dma_init_structure.peripheral_data_width = DMA_PERIPHERAL_DATA_WIDTH_HALFWORD;dma_init_structure.peripheral_inc_enable = FALSE;dma_init_structure.priority = DMA_PRIORITY_HIGH;dma_init_structure.loop_mode_enable = TRUE;dma_init(DMA1_CHANNEL1, &dma_init_structure);dma_interrupt_enable(DMA1_CHANNEL1, DMA_FDT_INT, TRUE);dma_channel_enable(DMA1_CHANNEL1, TRUE);/*ADC CONFIG*/adc_combine_mode_select(ADC_INDEPENDENT_MODE);adc_base_default_para_init(&adc_base_struct);adc_base_struct.sequence_mode = TRUE;adc_base_struct.repeat_mode = TRUE;adc_base_struct.data_align = ADC_RIGHT_ALIGNMENT;adc_base_struct.ordinary_channel_length = ADC_DMA_RegCnt;adc_base_config(ADC1, &adc_base_struct);for(index = 0; index < ADC_DMA_RegCnt; index++){adc_ordinary_channel_set(ADC1,(adc_channel_select_type)ADC_DMA_RegChannelList[index],index + 1,ADC_SAMPLETIME_41_5);}adc_ordinary_conversion_trigger_set(ADC1, ADC12_ORDINARY_TRIG_SOFTWARE, TRUE);adc_dma_mode_enable(ADC1, TRUE);adc_enable(ADC1, TRUE);adc_calibration_init(ADC1);while(adc_calibration_init_status_get(ADC1));adc_calibration_start(ADC1);while(adc_calibration_status_get(ADC1));}两种方式 :1 DMA完成中断中再次软件触发,实现循环采样,中断频率较高
2 ADC_DMA_GetValue中软件触发,需要获取数据时才开启采集
通过CONFIG_ADC_CIRCLE_ENABLE 进行切换
void DMA1_Channel1_IRQHandler(void)
{if(dma_flag_get(DMA1_FDT1_FLAG) != RESET){dma_flag_clear(DMA1_FDT1_FLAG);#if (CONFIG_ADC_CIRCLE_ENABLE == 1)adc_ordinary_software_trigger_enable(ADC1, TRUE);
#elsedma_trans_complete_flag = 1;
#endif}
}
/*** @brief 获取DMA搬运的ADC值* @param ADC_Channel:ADC通道号* @retval ADC值*/
uint16_t ADC_DMA_GetValue(uint8_t ADC_Channel)
{int16_t index;if(!IS_ADC_CHANNEL(ADC_Channel))return 0;index = ADC_DMA_SearchChannel(ADC_Channel);if(index == -1)return 0;#if (CONFIG_ADC_CIRCLE_ENABLE == 0) adc_ordinary_software_trigger_enable(ADC1, TRUE);while(dma_trans_complete_flag == 0);dma_trans_complete_flag = 0;
#endifreturn ADC_DMA_ConvertedValue[index];
}
六、USB HID IAP
1.准备好Bootloader和app
2.配置好时钟,一定要打开USB
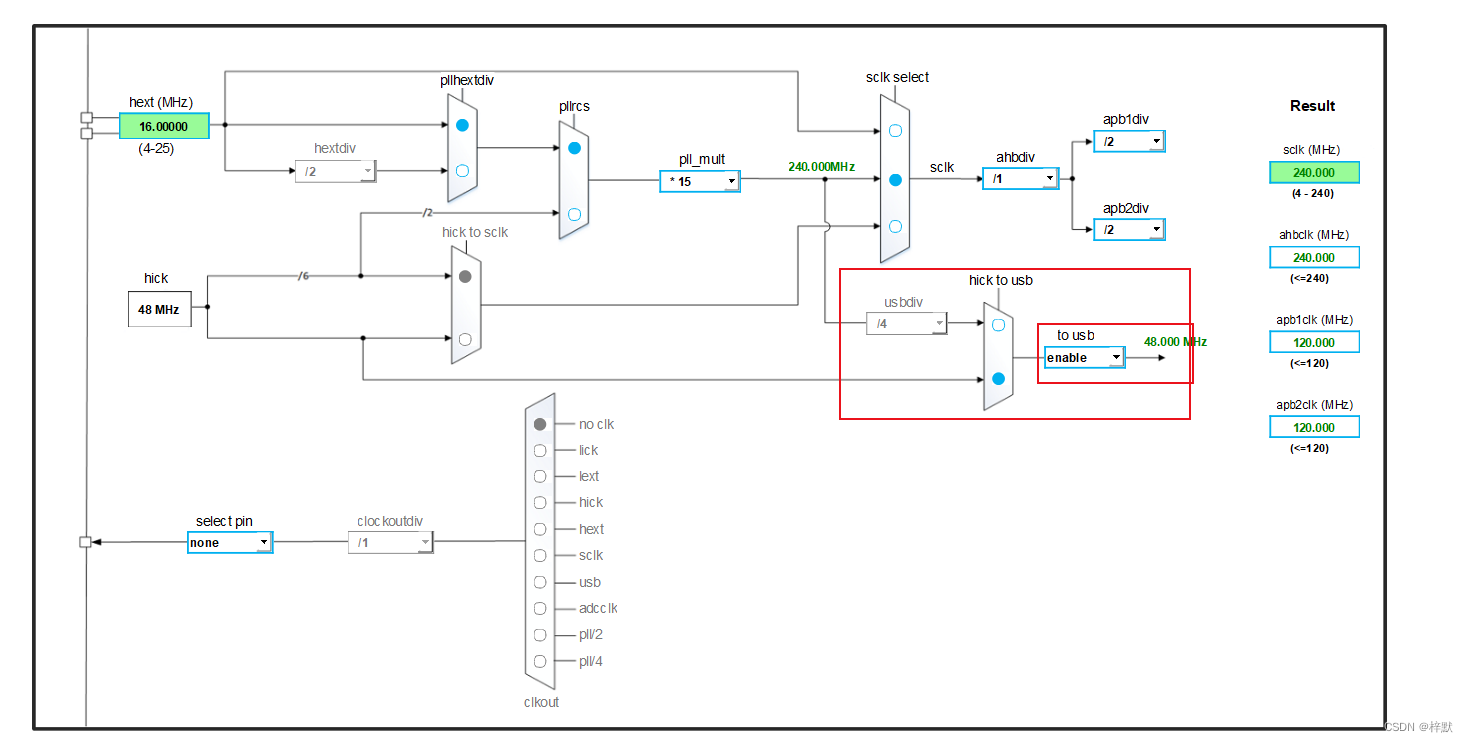
3.将生成的时钟配置复制到bootloader和app对应位置
设置正确才能正确识别HID设备,并且免驱,否则无法识别usb
void system_clock_config(void)
{/* reset crm */crm_reset();/* enable hext */crm_clock_source_enable(CRM_CLOCK_SOURCE_HEXT, TRUE);/* wait till hext is ready */while(crm_hext_stable_wait() == ERROR){}/* config pll clock resource */crm_pll_config(CRM_PLL_SOURCE_HEXT, CRM_PLL_MULT_15, CRM_PLL_OUTPUT_RANGE_GT72MHZ);/* enable pll */crm_clock_source_enable(CRM_CLOCK_SOURCE_PLL, TRUE);/* wait till pll is ready */while(crm_flag_get(CRM_PLL_STABLE_FLAG) != SET){}/* config ahbclk */crm_ahb_div_set(CRM_AHB_DIV_1);/* config apb2clk */crm_apb2_div_set(CRM_APB2_DIV_2);/* config apb1clk */crm_apb1_div_set(CRM_APB1_DIV_2);/* enable auto step mode */crm_auto_step_mode_enable(TRUE);/* select pll as system clock source */crm_sysclk_switch(CRM_SCLK_PLL);/* wait till pll is used as system clock source */while(crm_sysclk_switch_status_get() != CRM_SCLK_PLL){}/* disable auto step mode */crm_auto_step_mode_enable(FALSE);/* update system_core_clock global variable */system_core_clock_update();
}
4 设置bootloader和app的起始位置
bootloader
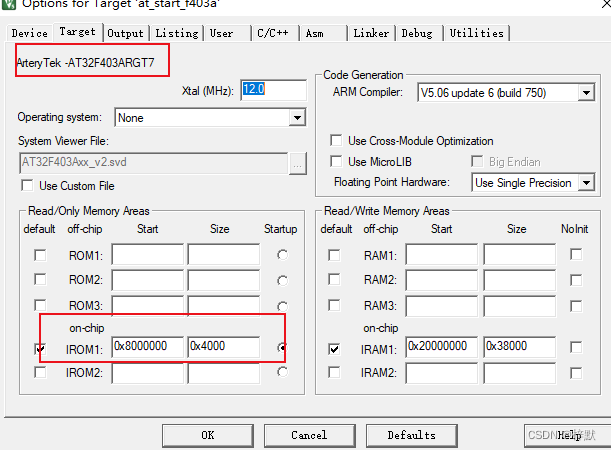
app
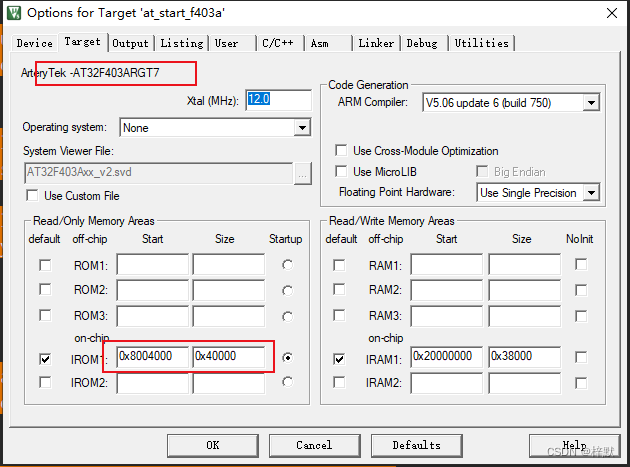
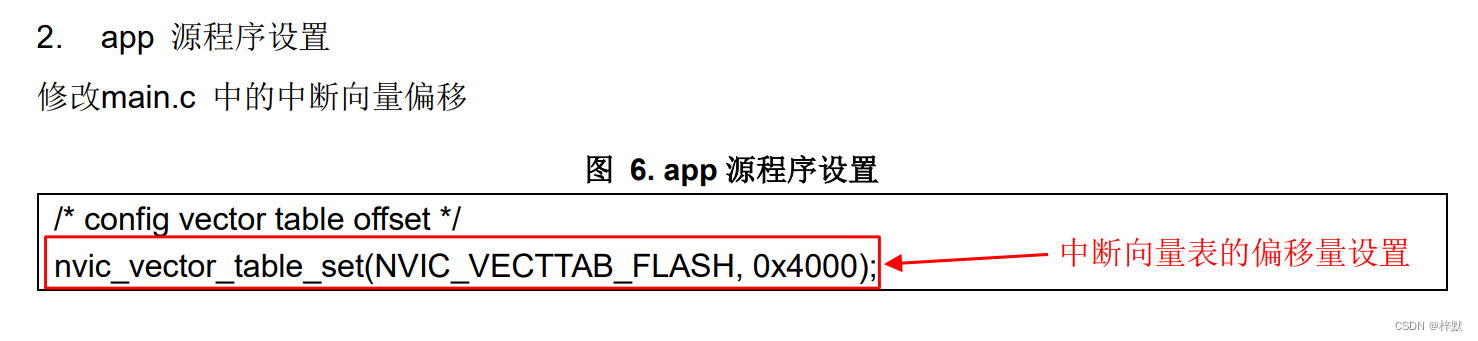
保持一致
5 使用IAP Programmer下载,地址要设置为app地址

这篇关于AT32固件库外设使用,ArduinoAPI接口移植,模块化的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







