本文主要是介绍梅尔倒谱系数MFCC由浅入深(超详细),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
MFCC梅尔倒谱系数(Mel-scale Frequency Cepstral Coefficients)
在语音识别(Speech Recognition)和话者识别(Speaker Recognition)方面,最常用到的语音特征就是梅尔倒谱系数(Mel-scale Frequency Cepstral Coefficients,简称MFCC)。根据人耳听觉机理的研究发现,人耳对不同频率的声波有不同的听觉敏感度。从200Hz到5000Hz的语音信号对语音的清晰度影响对大。两个响度不等的声音作用于人耳时,则响度较高的频率成分的存在会影响到对响度较低的频率成分的感受,使其变得不易察觉,这种现象称为掩蔽效应。由于频率较低的声音在内耳蜗基底膜上行波传递的距离大于频率较高的声音,故一般来说,低音容易掩蔽高音,而高音掩蔽低音较困难。在低频处的声音掩蔽的临界带宽较高频要小。所以,人们从低频到高频这一段频带内按临界带宽的大小由密到疏安排一组带通滤波器,对输入信号进行滤波。将每个带通滤波器输出的信号能量作为信号的基本特征,对此特征经过进一步处理后就可以作为语音的输入特征。由于这种特征不依赖于信号的性质,对输入信号不做任何的假设和限制,又利用了听觉模型的研究成果。因此,这种参数比基于声道模型的LPCC相比具有更好的鲁邦性,更符合人耳的听觉特性,而且当信噪比降低时仍然具有较好的识别性能。
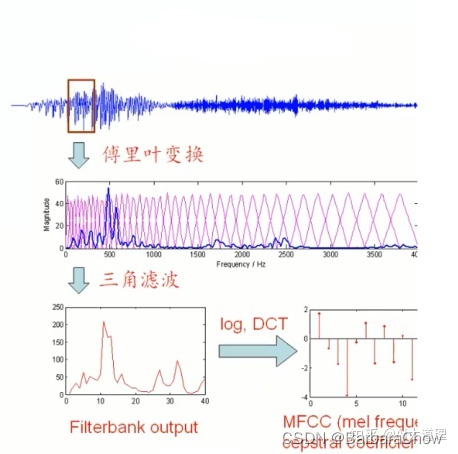
具体再看个图,或等读完全文再看这个图加深理解:
前言
需要了解的几个概念:
(1)同态处理
同态处理,也叫同态滤波,是一种将卷积关系变换为求和关系的分离处理技术。数字信号处理领域有一项重要任务,即解卷积,即将参与卷积的各个分量分开。在语音信号处理中,解卷积有两种,一种是线性预测,另一种是同态处理。
大概步骤为:
f(x,y)→DFT→H(u,v)→log→(DFT)-1→exp→g(x,y)
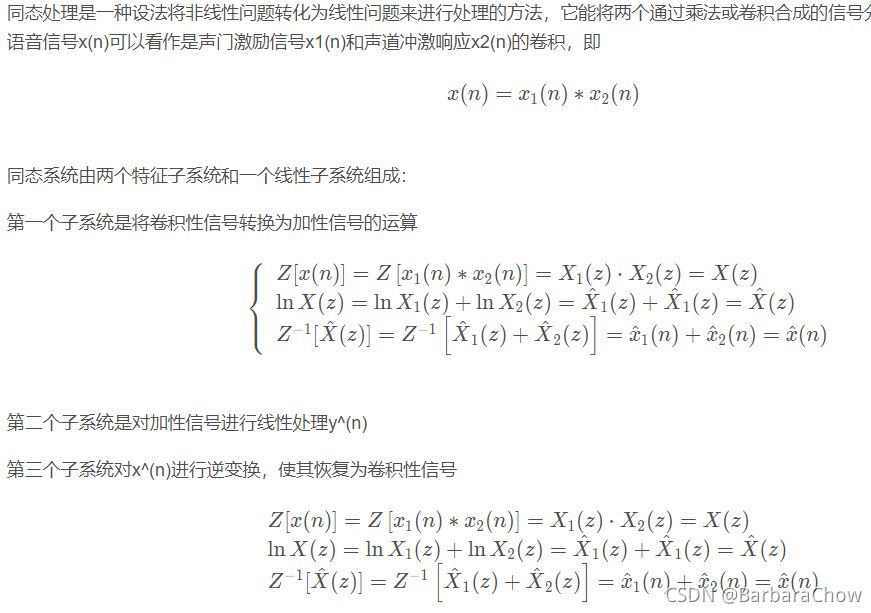
此时x(n)^也是一种时域序列,但他们所处的离散域和原下x(n)的域不同,所以把它称作复倒谱频域,简称复倒谱(Complex Cepstrum),有时也叫对数复倒谱。在绝大多数数字信号处理中,X(z),Y(z)等的收敛域均在单位圆内,所以Z变换可以为FFT变换,若FFT变换后只取实数部分,则最后得到为倒频谱,简称倒谱。
例如:采样频率16000Hz的语音信号,分离其声门激励信号和声道冲激响应,绘制其频谱。
clear all; clc; close all;
y=load('su1.txt'); % 读入数据
fs=16000; nfft=1024; % 采样频率和FFT的长度
time=(0:nfft-1)/fs; % 时间刻度
figure(1), subplot 211; plot(time,y,'k'); % 画出信号波形
title('信号波形'); axis([0 max(time) -0.7 0.7]);
ylabel('幅值'); xlabel(['时间/s' 10 '(a)']); grid;
figure(2)
nn=1:nfft/2; ff=(nn-1)*fs/nfft; % 计算频率刻度
Y=log(abs(fft(y))); % 按式(1)取实数部分
subplot 211; plot(ff,Y(nn),'k'); hold on; % 画出信号的频谱图
z=ifft(Y); % 按式(1)求取倒谱
figure(1), subplot 212; plot(time,z,'k'); % 画出倒谱图
title('信号倒谱图'); axis([0 time(512) -0.2 0.2]); grid;
ylabel('幅值'); xlabel(['倒频率/s' 10 '(b)']);
mcep=29; % 分离声门激励脉冲和声道冲激响应
zy=z(1:mcep+1);
zy=[zy' zeros(1,1000-2*mcep-1) zy(end:-1:2)']; % 构建声道冲激响应的倒谱序列
ZY=fft(zy); % 计算声道冲激响应的频谱
figure(2), % 画出声道冲激响应的频谱,用灰线表示
line(ff,real(ZY(nn)),'color',[.6 .6 .6],'linewidth',3);
grid; hold off; ylim([-4 5]);
title('信号频谱(黑线)和声道冲激响频谱(灰线)')
ylabel('幅值'); xlabel(['频率/Hz' 10 '(a)']); ft=[zeros(1,mcep+1) z(mcep+2:end-mcep)' zeros(1,mcep)]; % 构建声门激励脉冲的倒谱序列
FT=fft(ft); % 计算声门激励脉冲的频谱
subplot 212; plot(ff,real(FT(nn)),'k'); grid;% 画出声门激励脉冲的频谱
title('声门激励脉冲频谱')
ylabel('幅值'); xlabel(['频率/Hz' 10 '(b)']);
结果:


(2)离散余弦变换(Discrete Cosine Transform, DCT)
离散余弦变换经常用于信号处理和图像处理,用来对信号和图像进行有损数据压缩,这是由于离散余弦变换具有很强的"能量集中"特性:大多数的自然信号(包括声音和图像)的能量都集中在离散余弦变换后的低频部分,实际就是对每帧数据在进行一次降维。
对能量进行DCT变换。因为不同的Mel滤波器是有交集的,因此它们是相关的,我们可以用DCT变换去掉这些相关性,从而后续的建模时可以利用这一点(比如常见的GMM声学模型我们可以使用对角的协方差矩阵,从而简化模型)。
MFCC基本概述
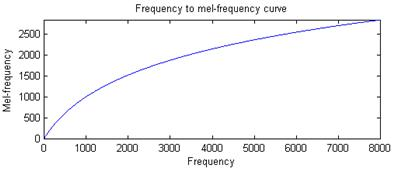
梅尔倒谱系数(Mel-scale Frequency Cepstral Coefficients,简称MFCC)是在Mel标度频率域提取出来的倒谱参数,Mel标度描述了人耳频率的非线性特性,它与频率的关系可用下式近似表示:

Mel频率与线性频率的关系:
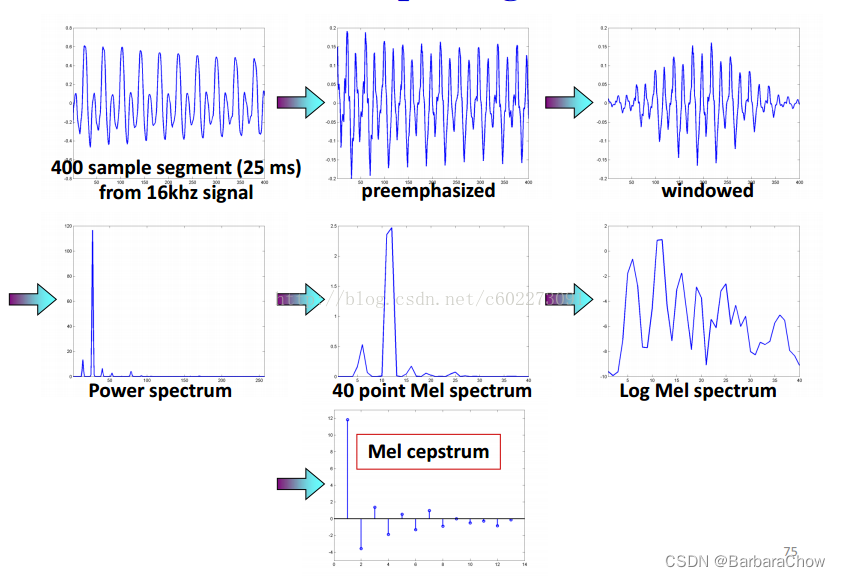
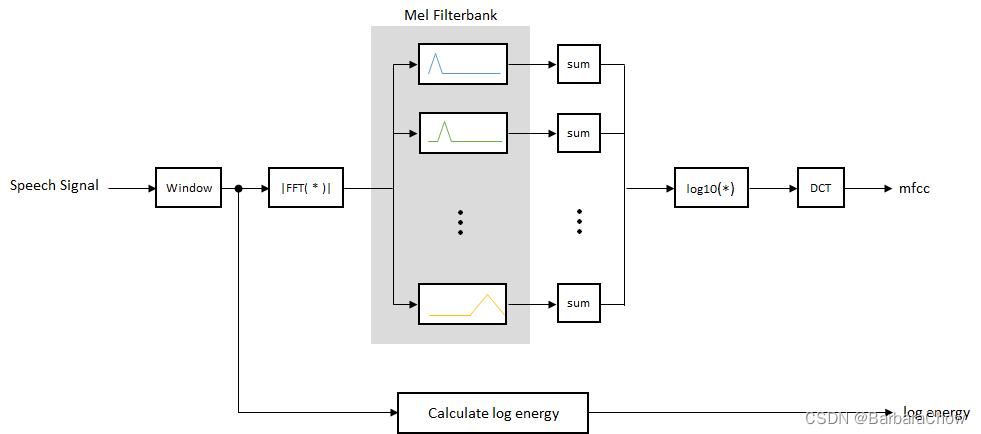
MFCC计算过程
流程图:
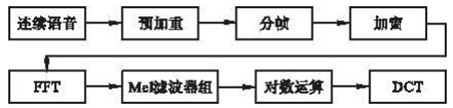
1.预处理
预处理包括预加重、分帧、加窗。
(1)预加重
预加重的目的是提升高频部分,使信号的频谱变得平坦,保持在低频到高频的整个频带中,能用同样的信噪比求频谱。同时,也是为了消除发生过程中声带和嘴唇的效应,来补偿语音信号受到发音系统所抑制的高频部分,也为了突出高频的共振峰。预加重处理其实是将语音信号通过一个高通滤波器:
时域表示形式:

(2)分帧
由于语音信号的非平稳特性 和 短时平稳特性,将语音信号分分帧。
一帧有N个采样点,如N的值为256或512,涵盖的时间约为20~30ms左右。为了避免相邻两帧的变化过大,平缓过度,因此会让两相邻帧之间有一段重叠区域,此重叠区域包含了M个取样点,通常M的值约为N的1/2或1/3。通常语音识别所采用语音信号的采样频率为8KHz或16KHz,以8KHz来说,若帧长度为256个采样点,则对应的时间长度是256/8000×1000=32ms。
(3)加窗
为了缓解频谱泄漏。将每一帧乘以一个窗函数,如汉明窗,海宁窗。假设分帧后的信号为S(n), n=0,1…,N-1, N为帧的大小,那么乘上汉明窗W(n):
2.频域变换及能量求取
(1)FFT
由于信号在时域上的变换通常很难看出信号的特性,所以通常将它转换为频域上的能量分布来观察,不同的能量分布,就能代表不同语音的特性。所以在乘上汉明窗后,每帧还必须再经过快速傅里叶变换以得到在频谱上的能量分布。对分帧加窗后的各帧信号进行快速傅里叶变换得到各帧的频谱。

式中x(n)为输入的语音信号,N表示傅里叶变换的点数。
(2)谱线能量
对FFT后的频谱取模平方得到语音信号的谱线能量。
3.计算通过Mel滤波器的能量
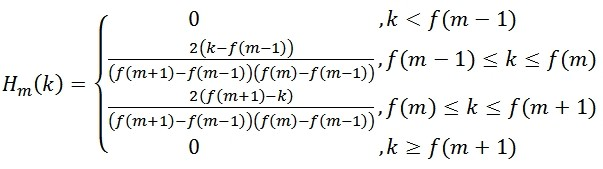
将能量谱通过一组Mel尺度的三角形滤波器组,定义一个有M个滤波器的滤波器组(滤波器的个数和临界带的个数相近),采用的滤波器为三角滤波器,中心频率为f(m) 。M通常取22-26。各f(m)之间的间隔随着m值的减小而缩小,随着m值的增大而增宽,如图所示:
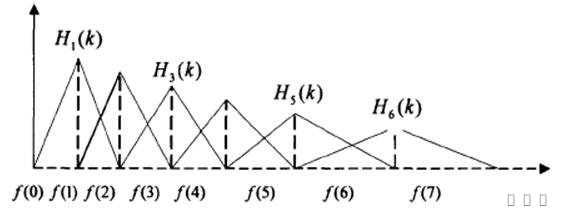
三角滤波器的频率响应定义为:
三角带通滤波器有三个主要目的:
-
三角形是低频密、高频疏的,这可以模仿人耳在低频处分辨率高的特性;
-
对频谱进行平滑化,并消除谐波的作用,突显原先语音的共振峰。(因此一段语音的音调或音高,是不会呈现在 MFCC 参数内,换句话说,以 MFCC 为特征的语音辨识系统,并不会受到输入语音的音调不同而有所影响;在每个三角形内积分,就可以消除精细结构,只保留音色的信息)
-
还可以减少数据量,降低运算量。
计算每个滤波器组输出的对数能量为:

深入内容:mel三角滤波器原理和设计
1.为什么会产生出Mel 这种尺度的机制呢?
Mel就是单词Melody(调,旋律)的简写,是根据人耳的听觉感知刻画出来的频率。
- 人耳朵具有特殊的功能,可以使得人耳朵在嘈杂的环境中,以及各种变异情况下仍能正常的分辨出各种语音
- 其中,耳蜗有关键作用,耳蜗实质上的作用相当于一个滤波器组,耳蜗的滤波作用是在对数频率尺度上进行的,在1000HZ以下为线性尺度,1K HZ以上为对数尺度,使得人耳对低频信号敏感,高频信号不敏感。
例如,人们可以比较容易地发现500和1000Hz的区别,但很难发现7500和8000Hz的区别。
2.Mel刻度定义:
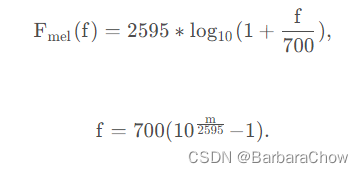
有时,还会写成:
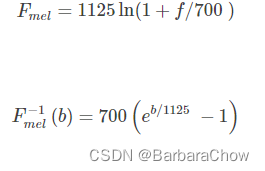
区别也看显然,一个是log以10为底,一个是ln。
mel频率是Hz的非线性变换log,对于以mel scale为单位的信号,可以做到人们对于相同频率差别的信号的感知能力几乎相同。
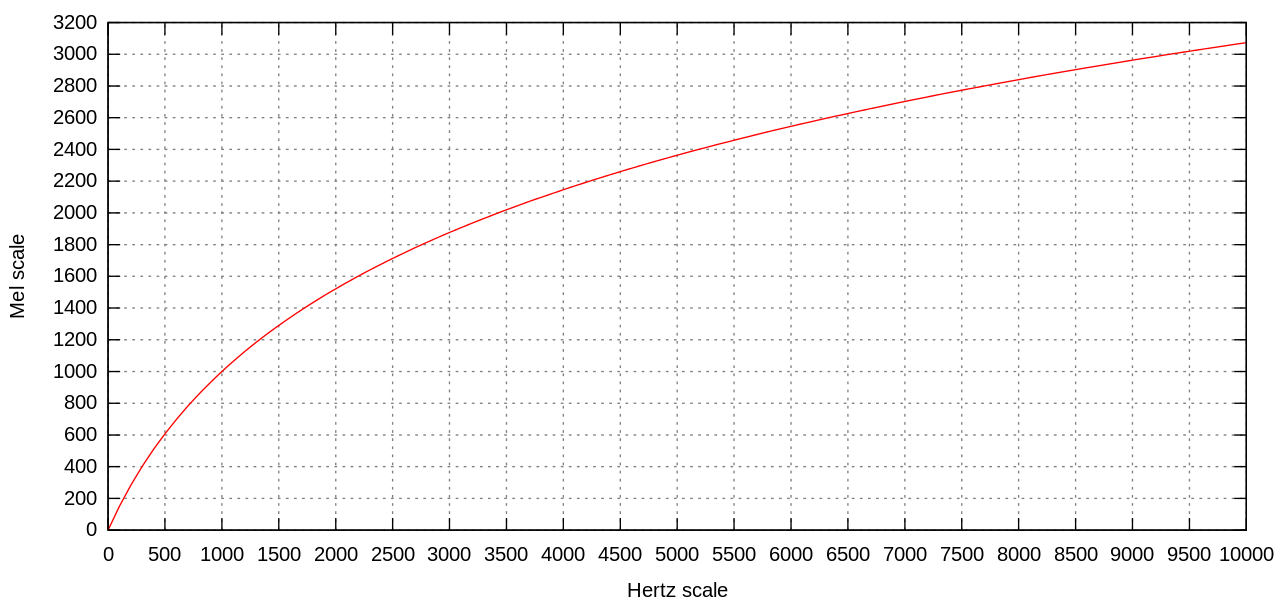
当频率较小时,mel随Hz变化较快(人耳对低频音调的感知较灵敏);
当频率很大时,mel的上升很缓慢,曲线的斜率很小。
我们一般用三角滤波器来设计mel滤波器组,当然也可以用其他的滤波器,三角是mel设计时最常用的。
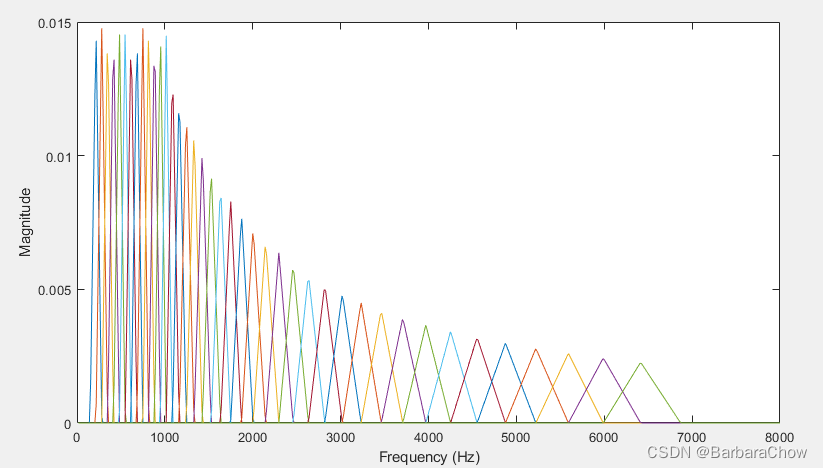
如下图所示,40个三角滤波器组成滤波器组,低频处滤波器密集,门限值大,高频处滤波器稀疏,门限值低。恰好对应了频率越高人耳越迟钝这一客观规律。该滤波器形式叫做等面积梅尔滤波器(Mel-filter bank with same bank area),在人声领域(语音识别,说话人辨认)等领域应用广泛。
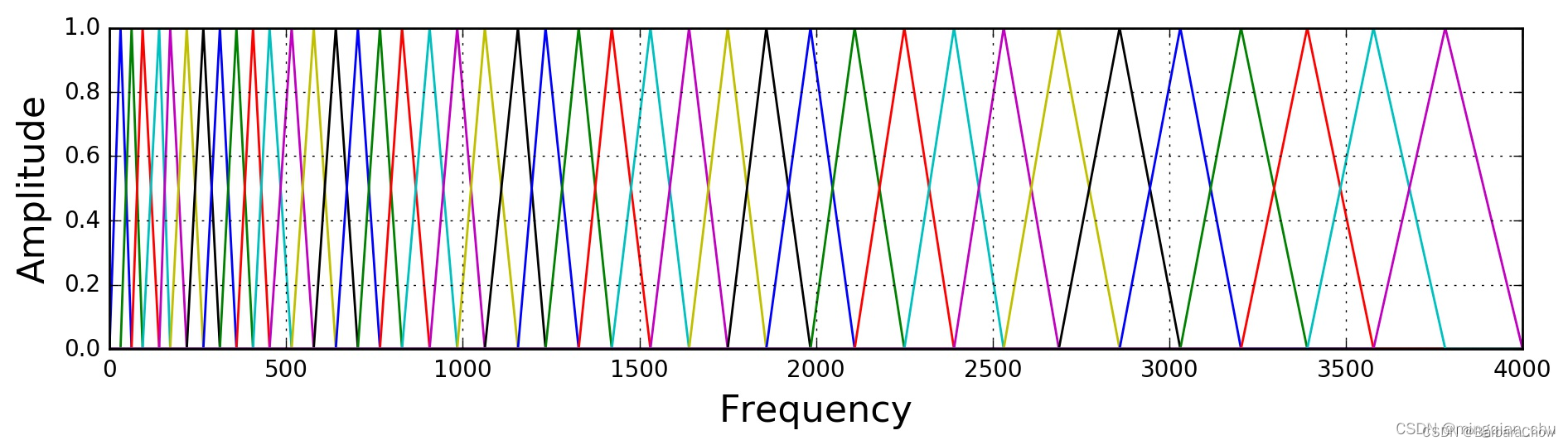
但是如果用到非人声领域,常用的就是等高梅尔滤波器组(Mel-filter bank with same bank height),如下图:
3.mel滤波器的实现:
(1)确定最低频率(0HZ),最高频率(fs/2),Mel滤波器个数M(如23);
(2)转换最低频率和最高频率的Mel(f);
low_freq_mel = 0
high_freq_mel = 2595 * np.log10(1 + (fs / 2) / 700)
print(low_freq_mel, high_freq_mel)
(3)计算相连两个Mel滤波器中心Mel频率的距离,在Mel频率上,两两之间的中心频率是等间距的;
d = (high_mel - low_mel ) / M+1
(4)将每个中心Mel频率转化为频率f(非等间距);
nfilt = 40 #滤波器个数
mel_points = np.linspace(low_freq_mel, high_freq_mel, nfilt + 2) # 所有的mel中心点,为了方便后面计算mel滤波器组,左右两边各补一个中心点
hz_points = 700 * (10 ** (mel_points / 2595) - 1)
(5)计算频率所对应的FFT中点的下标;
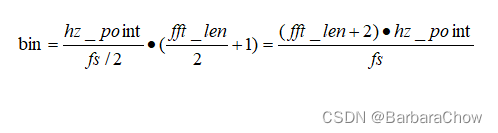
fbank = np.zeros((nfilt, int(NFFT / 2 + 1))) # 各个mel滤波器在能量谱对应点的取值
bin = (hz_points / (fs / 2)) * (NFFT / 2) # 各个mel滤波器中心点对应FFT的区域编码,找到有值的位置
for i in range(1, nfilt + 1):left = int(bin[i-1])center = int(bin[i])right = int(bin[i+1])for j in range(left, center):fbank[i-1, j+1] = (j + 1 - bin[i-1]) / (bin[i] - bin[i-1])for j in range(center, right):fbank[i-1, j+1] = (bin[i+1] - (j + 1)) / (bin[i+1] - bin[i])
print(fbank)
matlab版实现:
fs=8000;
fl=0; fh=fs/2;
bl=1125*log(1+fl/700);%将频率转换为Mel频率
bh=1125*log(1+fh/700);
p=24;%滤波器个数
nfft=256;%FFT点数
B=bh-bl;
y=linspace(0,B,p+2);%产生0到B之间p+2个数
Fb=700*(exp(y/1125)-1);%将Mel频率转换为频率
W2=nfft/2+1;%fs/2内对应的FFT点数
df=fs/nfft;
freq=(0:W2-1)*df;%采样频率值
bank=zeros(24,W2);%生成一个24行W2列的全零数组
for k=2:p+1%why从2开始?因为k-1f1=Fb(k-1); f2=Fb(k+1); f0=Fb(k);n1=floor(f1/df)+1;%f(m-1)在频域中的谱线索引号n2=floor(f2/df)+1;%f(m+1)在频域中的谱线索引号n0=floor(f0/df)+1;%f(m)在频域中的谱线索引号。f(m)是从0开始,而在MATLAB中数组的索引是从1开始,所以要加1,否则会出现index=0的错误for i=1 : W2if i>=n1 & i<=n0bank(k-1,i)=(i-n1)/(n0-n1);elseif i>n0 & i<=n2bank(k-1,i)=(n2-i)/(n2-n0);endendplot(freq,bank(k-1,:),'r','linewidth',2); hold on
end
grid;
4. 对数能量取log, 计算DCT倒谱
(1)对能量取log
对于滤波器组的能量,我们对它取log。这也是受人类听觉的启发:人类对于声音大小(loudness)的感受不是线性的。为了使人感知的大小变成2倍,我们需要提高8倍的能量。这意味着如果声音原来足够响亮,那么再增加一些能量对于感知来说并没有明显区别。log这种压缩操作使得我们的特征更接近人类的听觉。为什么是log而不是立方根呢?因为log可以让我们使用倒谱均值减(cepstral mean subtraction)这种信道归一化技术(这可以归一化掉不同信道的差别)。
(2)DCT
经离散余弦变换(DCT)得到MFCC系数 :

将上述的对数能量带入离散余弦变换,求出L阶的Mel参数。L阶指MFCC系数阶数,通常取12-16。这里M是三角滤波器个数。
Deltas和Delta-Deltas特征
Deltas和Delta-Deltas通常也叫(一阶)差分系数和二阶差分(加速度)系数。MFCC特征向量描述了一帧语音信号的功率谱的包络信息,但是语音识别也需要帧之间的动态变化信息,比如MFCC随时间的轨迹,实际证明把MFCC的轨迹变化加入后会提高识别的效果。因此我们可以用当前帧前后几帧的信息来计算Delta和Delta-Delta:
上式得到的dt是Delta系数,计算第t帧的Delta需要t-N到t+N的系数,N通常是2。如果对Delta系数dt再使用上述公式就可以得到Delta-Delta系数,这样我们就可以得到3*12=36维的特征。上面也提到过,我们通常把能量也加到12维的特征里,对能量也可以计算一阶和二阶差分,这样最终可以得到39维的MFCC特征向量。
实现
MATLAB
注:在提取MFCC参数之前需要加载并使用VOICEBOX工具包
Df=5;
fs=8000;
N=fs/Df;
t=0:1./fs:(N-1)./fs;
x=sin(2*pi*200*t);
bank=melbankm(24,256,8000,0,0.5,'t');%Mel滤波器的阶数为24,fft变换的长度为256,采样频率为8000Hz
%归一化mel滤波器组系数
bank=full(bank);
bank=bank/max(bank(:));
% DCT系数,12*p
for k=1:12
n=0:23;
dctcoef(k,:)=cos((2*n+1)*k*pi/(2*24));
end
%归一化倒谱提升窗口
w=1+6*sin(pi*[1:12]./12);
%w=w/max(w);
%语音信号分帧
xx=enframe(x,256,80);%对x 256点分为一帧
%计算每帧的MFCC参数
for i=1:size(xx,1)
y=xx(i,:);
s=y'.*hamming(256);
t=abs(fft(s));%fft快速傅立叶变换
t=t.^2;
c1=dctcoef*log(bank*t(1:129));
c2=c1.*w';
end
plot(c2);title('MFCC');
Python实现方法
import numpy as np
from scipy import signal
from scipy.fftpack import dct
import pylab as pltdef enframe(wave_data, nw, inc, winfunc):'''将音频信号转化为帧。参数含义:wave_data:原始音频型号nw:每一帧的长度(这里指采样点的长度,即采样频率乘以时间间隔)inc:相邻帧的间隔(同上定义)'''wlen=len(wave_data) #信号总长度if wlen<=nw: #若信号长度小于一个帧的长度,则帧数定义为1nf=1else: #否则,计算帧的总长度nf=int(np.ceil((1.0*wlen-nw+inc)/inc))pad_length=int((nf-1)*inc+nw) #所有帧加起来总的铺平后的长度zeros=np.zeros((pad_length-wlen,)) #不够的长度使用0填补,类似于FFT中的扩充数组操作pad_signal=np.concatenate((wave_data,zeros)) #填补后的信号记为pad_signalindices=np.tile(np.arange(0,nw),(nf,1))+np.tile(np.arange(0,nf*inc,inc),(nw,1)).T #相当于对所有帧的时间点进行抽取,得到nf*nw长度的矩阵indices=np.array(indices,dtype=np.int32) #将indices转化为矩阵frames=pad_signal[indices] #得到帧信号win=np.tile(winfunc,(nf,1)) #window窗函数,这里默认取1return frames*win #返回帧信号矩阵Df=5
fs=8000
N=fs/Df
t = np.arange(0,(N-1)/fs,1/fs)
wave_data=np.sin(2*np.pi*200*t)
#预加重
#b,a = signal.butter(1,1-0.97,'high')
#emphasized_signal = signal.filtfilt(b,a,wave_data)
#归一化倒谱提升窗口
lifts=[]
for n in range(1,13):lift =1 + 6 * np.sin(np.pi * n / 12)lifts.append(lift)
#print(lifts) #分帧、加窗
winfunc = signal.hamming(256)
X=enframe(wave_data, 256, 80, winfunc) #转置的原因是分帧函数enframe的输出矩阵是帧数*帧长
frameNum =X.shape[0] #返回矩阵行数18,获取帧数
#print(frameNum)
for i in range(frameNum):y=X[i,:]#fftyf = np.abs(np.fft.fft(y)) #print(yf.shape)#谱线能量yf = yf**2#梅尔滤波器系数nfilt = 24low_freq_mel = 0NFFT=256high_freq_mel = (2595 * np.log10(1 + (fs / 2) / 700)) # 把 Hz 变成 Melmel_points = np.linspace(low_freq_mel, high_freq_mel, nfilt + 2) # 将梅尔刻度等间隔hz_points = (700 * (10**(mel_points / 2595) - 1)) # 把 Mel 变成 Hzbin = np.floor((NFFT + 1) * hz_points / fs)fbank = np.zeros((nfilt, int(np.floor(NFFT / 2 + 1))))for m in range(1, nfilt + 1):f_m_minus = int(bin[m - 1]) # leftf_m = int(bin[m]) # centerf_m_plus = int(bin[m + 1]) # rightfor k in range(f_m_minus, f_m):fbank[m - 1, k] = (k - bin[m - 1]) / (bin[m] - bin[m - 1])for k in range(f_m, f_m_plus):fbank[m - 1, k] = (bin[m + 1] - k) / (bin[m + 1] - bin[m])filter_banks = np.dot(yf[0:129], fbank.T)filter_banks = np.where(filter_banks == 0, np.finfo(float).eps, filter_banks) # 数值稳定性filter_banks = 10 * np.log10(filter_banks) # dB filter_banks -= (np.mean(filter_banks, axis=0) + 1e-8)#print(filter_banks)#DCT系数num_ceps = 12c2 = dct(filter_banks, type=2, axis=-1, norm='ortho')[ 1 : (num_ceps + 1)] # Keep 2-13c2 *= lifts
print(c2)
plt.plot(c2)
plt.show()总结
因此,MFCC的全部组成其实是由: N维MFCC参数(N/3 MFCC系数+ N/3 一阶差分参数+ N/3 二阶差分参数)+帧能量(此项可根据需求替换)。
这里的帧能量是指一帧的音量(即能量),也是语音的重要特征,而且非常容易计算。因此,通常再加上一帧的对数能量(定义:一帧内信号的平方和,再取以10为底的对数值,再乘以10)使得每一帧基本的语音特征就多了一维,包括一个对数能量和剩下的倒频谱参数。另外,解释下最开始说的40维是怎么回事,假设离散余弦变换的阶数取13,那么经过一阶二阶差分后就是39维了再加上帧能量总共就是40维,当然这个可以根据实际需要动态调整。
相关资料:
http://practicalcryptography.com/miscellaneous/machine-learning/guide-mel-frequency-cepstral-coefficients-mfccs/
这篇关于梅尔倒谱系数MFCC由浅入深(超详细)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






