本文主要是介绍自动驾驶系列(十)编写电动车ROS节点(刹车),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、硬件控制协议
对于不同的设备,底层的通讯方式都不一致,因此需要根据具体硬件具体分析。本系统 采用了1个CAN盒子控制转向,1路DA控制油门,另外一路DA控制刹车。
1,转向协议
CAN协议获取当前状态的帧ID是0x322,发送控制指令的ID是0x215。500kbps。
一条十六进制控制码是 00 31 X1 X2 Y1 00 00 00。
其中X1*256+X2=控制角度 Y1控制角速度。
2,油门协议
串口转DA控制模块,设置波特率9600bps。
一条十六进制控制码是 01 06 00 00 X1 X2 Y1 Y2。
其中,X1*256+X2控制DA输出电压。空载测试大约 5km/h对应 01 99,10km/h对应 03 33。
Y1和Y2分别是对前八位数据进行CRC校验后的输出结果。
3,刹车协议
串口转DA控制模块,设置波特率9600bps。
启动刹车:01 06 00 00 0c cd 4d 5f。
取消刹车:01 06 00 00 00 00 89 ca。
二、ROS节点接收速度控制消息
对于ROS节点的编写规则,可以参考本系列第二讲中推荐的ros基本教程。
首先创建功能包,实现监听cmd_vel消息,命名为bjtucar:
cd ~/catkin_ws/src
catkin_create_pkg bjtucar std_msgs std_msgs roscpp
创建节点订阅文件myCar.cpp
cd ~/catkin_ws/src/bjtucar/src/
gedit myCar.cpp在文件中粘贴以下内容:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
void cmd_vel_callback(const geometry_msgs::Twist& vel_cmd)
{ROS_INFO("I heard: [%f]", vel_cmd.linear.y);ROS_INFO("I heard: [%f]", vel_cmd.linear.x);std::cout << "Twist Received " << std::endl;
}
int main( int argc, char* argv[] )
{ros::init(argc, argv, "myCar" );ros::NodeHandle n;ros::Subscriber sub = n.subscribe("/turtle1/cmd_vel", 1000, cmd_vel_callback);while( n.ok() ){ros::spin();}return 1;
}
在CMakeList.txt文件最后增加代码:
add_executable(bjtucar ./src/myCar.cpp)
target_link_libraries(bjtucar ${catkin_LIBRARIES})重新编译
cd ~/catkin_ws
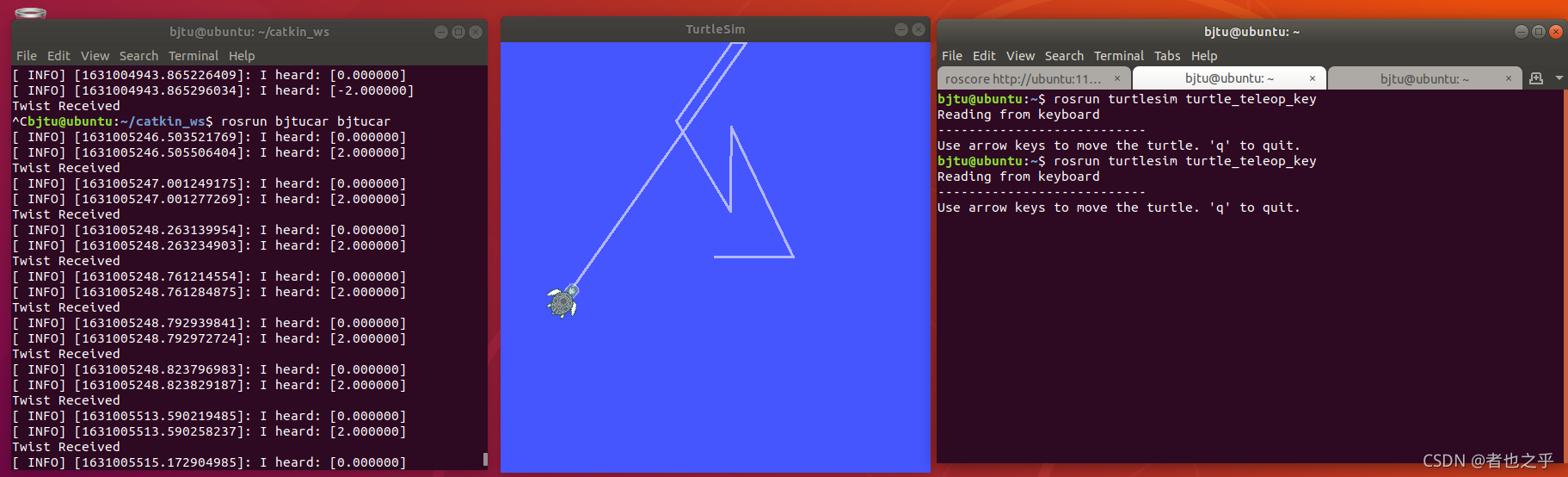
catkin_make测试:打开4个终端,分别运行以下节点
启动内核: roscore
启动仿真乌龟节点: rosrun turtlesim turtlesim_node
启动键盘控制节点: rosrun turtlesim turtle_teleop_key
启动myCar节点: rosrun bjtucar bjtucar
可以通过输入方向键,发送cmd_vel消息,myCar节点监听该消息后打印出来。
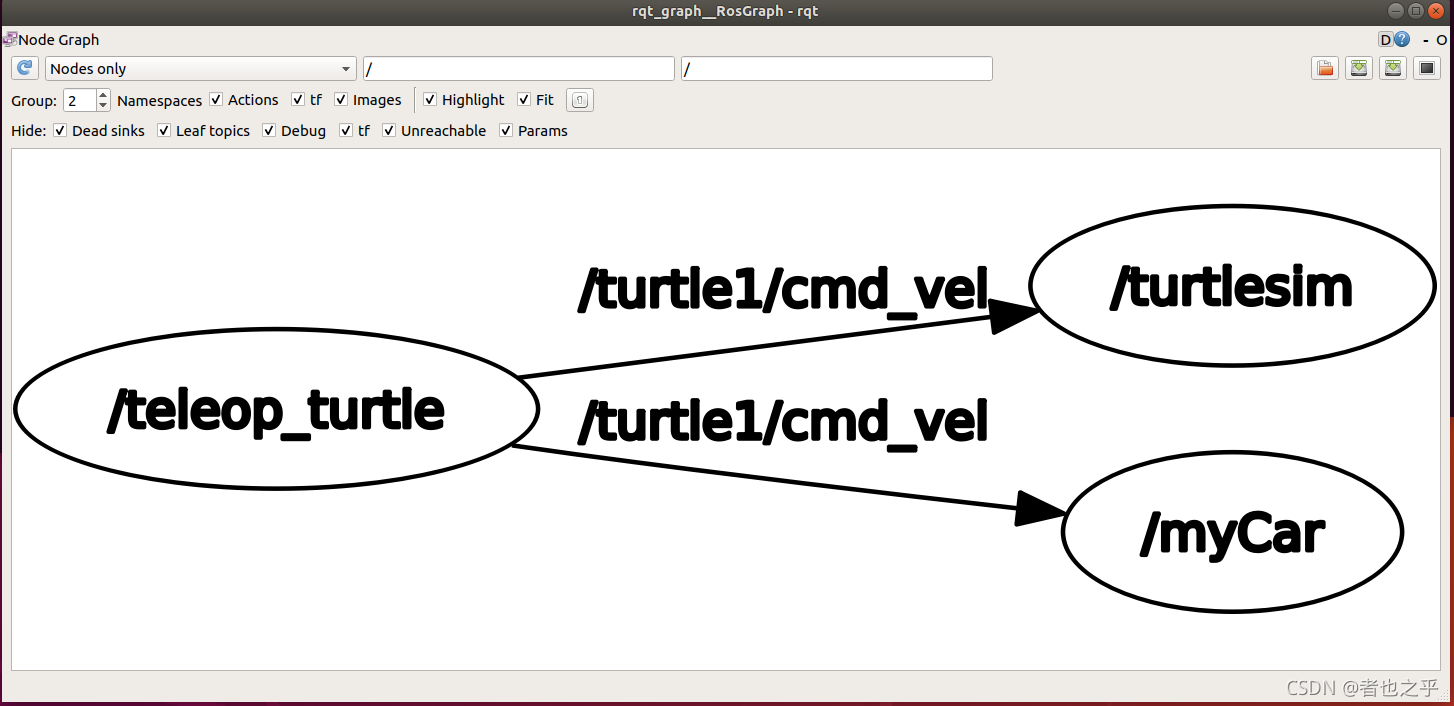
新终端,rqt_graph查看当前节点状态
三、ROS节点控制刹车
控制油门和刹车,都需要添加串口节点,我们先假设配置油门是串口1,刹车是串口2。首先按照一个串口添加。
3.1添加串口功能
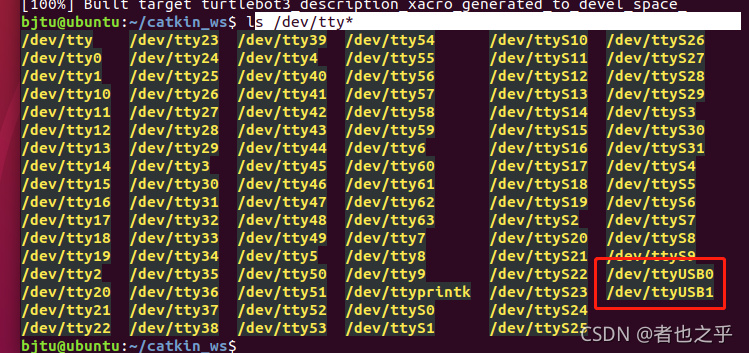
查看串口设备,修改串口名称:ls /dev/tty*。 一般是ttyACM0 或者 ttyUSB0。

#include <ros/ros.h>
#include <geometry_msgs/Twist.h>#include <serial/serial.h>
serial::Serial ser; //声明串口对象 1
void cmd_vel_callback(const geometry_msgs::Twist& vel_cmd)
{ROS_INFO("I heard: [%f]", vel_cmd.linear.y);ROS_INFO("I heard: [%f]", vel_cmd.linear.x);std::cout << "Twist Received " << std::endl;
}
int main( int argc, char* argv[] )
{ros::init(argc,argv,"serial_port");//设置串口属性,并打开串口ser.setPort("/dev/ttyACM0");ser.setBaudrate(9600);serial::Timeout to = serial::Timeout::simpleTimeout(100);ser.setTimeout(to);try{ser.open();}catch (serial::IOException& e){ROS_ERROR_STREAM("Unable to open port ");return -1;}//检测串口是否已经打开,并给出提示信息if(ser.isOpen()){ROS_INFO_STREAM("Serial Port initialized");}else{return -1;}ros::init(argc, argv, "myCar" );ros::NodeHandle n;ros::Subscriber sub = n.subscribe("/turtle1/cmd_vel", 1000, cmd_vel_callback);while( n.ok() ){ros::spin();}return 1;
}修改CMakeList.txt文件,添加了serial的包依赖。
cmake_minimum_required(VERSION 3.0.2)
project(bjtucar)find_package(catkin REQUIRED COMPONENTSserialroscppstd_msgsstd_msgs
)catkin_package(
)include_directories(
# include${catkin_INCLUDE_DIRS}
)add_executable(bjtucar ./src/myCar.cpp)
target_link_libraries(bjtucar ${catkin_LIBRARIES})安装serial包,再次编译通过。
sudo apt-get install ros-melodic-serial
cd ~/catkin
catkin_make启动内核节点:roscore
启动myCar节点: rosrun bjtucar bjtucar

修改USB权限: sudo chmod 666 /dev/ttyUSB0
再次运行,成功。

3.2串口调试工具cutecom
(1)终端下载命令:sudo apt-get install cutecom
(2)通过终端打开软件:sudo cutecom (需要root权限,否则无法打开串口)
3.3输出控制指令
当键盘按下”↑“时,刹车踏板松开。当键盘按下”↓“时,刹车踩下。
修改myCar.cpp文件内容如下:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>#include <serial/serial.h>
serial::Serial ser; //声明串口对象 1//static unsigned char doBrake[8]; //分配静态存储空间
unsigned char doBrake[8]={0x01, 0x06, 0x00, 0x00, 0x0c, 0xcd, 0x4d, 0x5f};
unsigned char noBrake[8]={0x01, 0x06, 0x00, 0x00, 0x00, 0x00, 0x89, 0xca};//int doBrake[8]={1, 6, 0, 0, 12, 205, 77, 95};
//int noBrake[8]={1, 6, 0, 0, 0, 0, 137, 202};
void cmd_vel_callback(const geometry_msgs::Twist& vel_cmd)
{ROS_INFO("I heard: [%f]", vel_cmd.linear.y);ROS_INFO("I heard: [%f]", vel_cmd.linear.x);std::cout << "Twist Received " << std::endl;if(vel_cmd.linear.x>0)ser.write(noBrake,8);else if(vel_cmd.linear.x<0)ser.write(doBrake,8);else;
}
int main( int argc, char* argv[] )
{ros::init(argc,argv,"serial_port");//设置串口属性,并打开串口ser.setPort("/dev/ttyUSB0");ser.setBaudrate(9600);serial::Timeout to = serial::Timeout::simpleTimeout(100);ser.setTimeout(to);try{ser.open();}catch (serial::IOException& e){ROS_ERROR_STREAM("Unable to open port ");return -1;}//检测串口是否已经打开,并给出提示信息if(ser.isOpen()){ROS_INFO_STREAM("Serial Port initialized");}else{return -1;}ros::init(argc, argv, "myCar" );ros::NodeHandle n;ros::Subscriber sub = n.subscribe("/turtle1/cmd_vel", 1000, cmd_vel_callback);while( n.ok() ){ros::spin();}return 1;
}重新编译
cd ~/catkin
catkin_make测试:
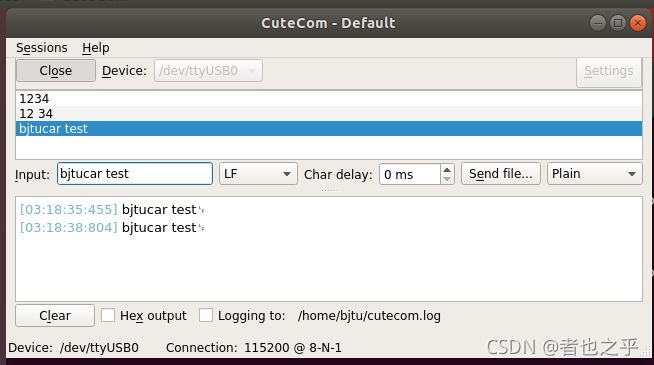
1,用两个串口模块连接到电脑端。并查看串口号。ttyUSB0的输出用导线连接到ttyUSB1的输入。
2,打开串口调试工具,监控串口ttyUSB1。
sudo cutecom
3,依次启动节点
启动内核: roscore
启动键盘控制节点: rosrun turtlesim turtle_teleop_key
启动myCar节点: rosrun bjtucar bjtucar
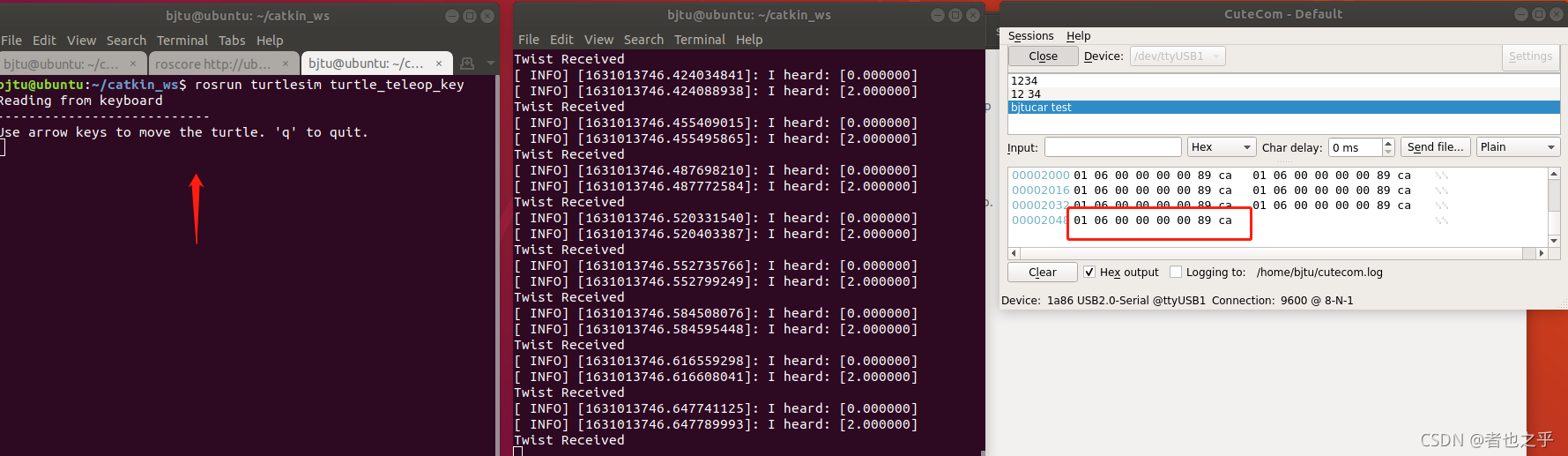
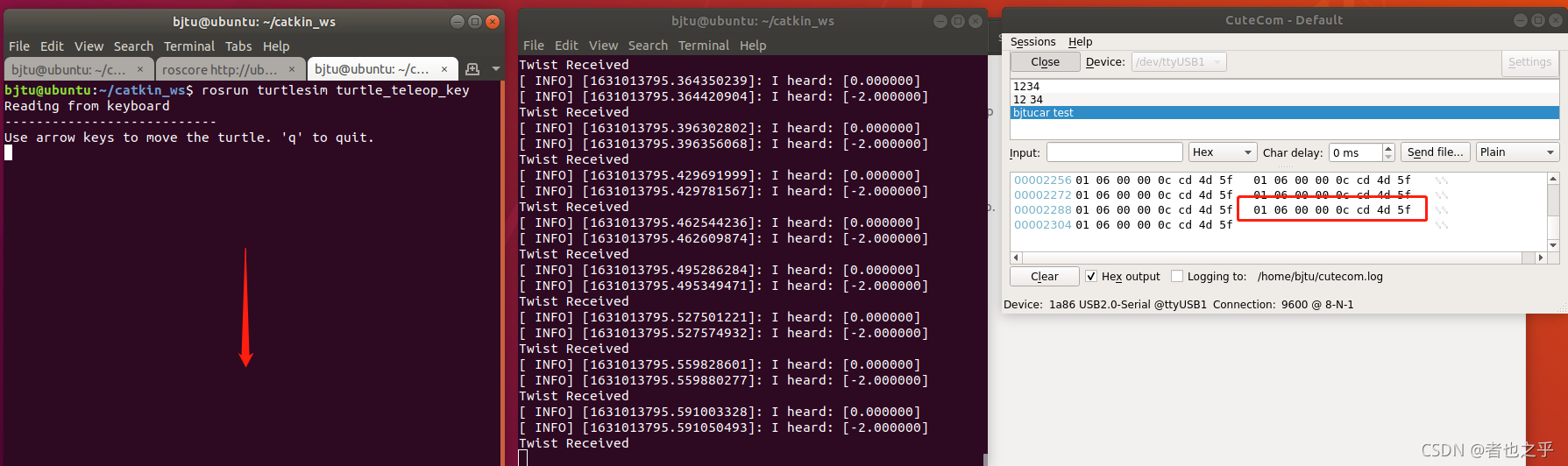
在键盘输入的终端,分别输入方向按键,可以监控到串口出不同的刹车指令。
这篇关于自动驾驶系列(十)编写电动车ROS节点(刹车)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



