本文主要是介绍Betaflight关于STM32F405 SBUS协议兼容硬件电气特性问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Betaflight关于STM32F405 SBUS协议兼容硬件电气特性问题
- 1. 源由
- 2. 储备知识
- 2.1 三态逻辑(Tri-state Logic)
- 2.1 上拉 (Pull-up)
- 2.2 下拉 (Pull-down)
- 2.3 Current Sink
- 2.4 Current Source
- 2.5 GPIO输入模式
- 2.6 GPIO输出模式
- 3. FPV系统协议简介
- 3.1 TX Protocols – communication between radio transmitter (TX) and radio receiver (RX)
- 3.2 RX Protocols – communication between radio receiver (RX) and flight controller (FC)
- 3.3 ESC Protocols – communication between FC and ESC
- 4. 分析
- 4.1 硬件方案
- 4.2 接收机sbus翻转
- 4.3 飞控固件
- 5. 实测4.4.2固件
- 5.1 固件编译
- 5.2 配置ELRS接收机
- 5.3 配置F405飞控
- 5.4 实测结果
- 6. 总结
- 7. 参考资料
1. 源由
最近遇到一个问题:
1)现象:STM32F405飞控,无法接sbus接收机。
2)原因:与通常F405飞控差异是没有sbus接口。
为了更好的解释这个问题,先储备一些基础知识。
2. 储备知识
2.1 三态逻辑(Tri-state Logic)
通常MCU的GPIO会设计成三态,此时信号取决于外部电路逻辑。
- 逻辑0 (connection to ground)
- 逻辑1 (connection to VCC, mostly through resistor)
- 高阻 (High-impedance, also called “floating”, “Hi-Z”, “tri-stated”)
注:高阻态是一种信号线共享的机制,当需要使用信号线是进行拉高、拉低输出信号。高阻时放弃信号线使用权。
2.1 上拉 (Pull-up)
通过上拉电阻,将信号线拉至默认输出状态。MCU控制器设计时也有内部上拉选项,相当于外部上拉电阻的效果。
2.2 下拉 (Pull-down)
通过下拉电阻,将信号线拉至默认输出状态。MCU控制器设计时也有内部下拉选项,相当于外部下拉电阻的效果。
2.3 Current Sink
通常指IO能够承受多少负载电流,超出负载将会损坏IO(芯片)。
2.4 Current Source
通常指IO能提供的负载的驱动能力,超出负债将无法工作。
2.5 GPIO输入模式
- High-impedance (often the default – floats if not driven)
- Pull-up (internal resistor connected to VCC)
- Pull-down (internal resistor connected to Ground)
2.6 GPIO输出模式
- Push-pull输出: 常见GPIO配置方式,具备Current Sink/Source能力
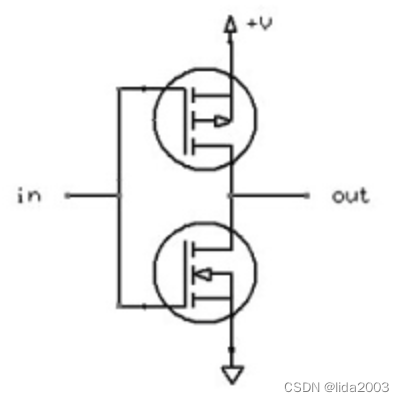
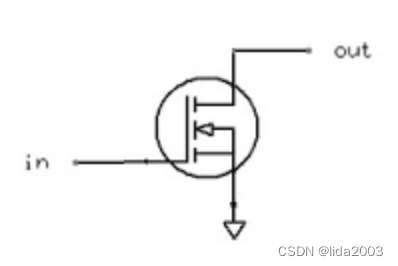
- Open-Drain输出: 相当于一个对地的开关,具备Current Sink能力
Open-drain
Open-drain with internal pull-up // 常用于通信,比如:I2C
注:Open-Collector是BJT,Open-Drain指FET 【 2 】 ^{【2】} 【2】。
3. FPV系统协议简介
3.1 TX Protocols – communication between radio transmitter (TX) and radio receiver (RX)
- ACCST (Frsky)
- ACCESS (Frsky)
- DSM (Spektrum)
- DSM2 (Spektrum)
- DSMX (Spektrum)
- AFHDS (Flysky)
- AFHDS 2A (Flysky)
- A-FHSS (Hitec)
- FASST (Futaba)
- Hi-Sky (Deviation / Devo)
3.2 RX Protocols – communication between radio receiver (RX) and flight controller (FC)
- PWM (universal)
- PPM or CPPM (universal)
- SBUS (Futaba, Frsky)
- IBUS (Flysky)
- XBUS (JR)
- MSP (Multiwii)
- CRSF (ExpressLRS, TBS Crossfire and Tracer)
- SPEKTRUM1024 (Spektrum DSM2)
- SPEKTRUM2048 (Spektrum DSMX)
- FPort (Frsky)
- SPI_RX (universal) – More detail in this article
- GHST (ImmersionRC Ghost)
3.3 ESC Protocols – communication between FC and ESC
- PWM
- Oneshot (Oneshot42, Oneshot125)
- Multishot
- Proshot
- Dshot (Dshot150, Dshot300, Dshot600, Dshot1200)
4. 分析
回到本文的主要目标:没有sbus焊盘的F405飞控与sbus接收机通信。
首先,从前面储备知识我们了解到以下几个信息:
- SBUS 是接收机与飞控之间的协议
- MCU的GPIO作为输入:可以处于高组态,根据外部信号的变化而感知高低电平
- SBUS协议是futaba编制RC控制协议 【 5 】 ^{【5】} 【5】,未减少干扰使用低电平有效 【 1 】【 3 】 ^{【1】【3】} 【1】【3】
4.1 硬件方案
市面上常见的处理方法:采用一个转换器进行转换。

除了上述硬件方法以外,其实还有两个思路可以考虑:
- 接收机信号输出时进行信号翻转
- 飞控端协议解析时,进行信号翻转
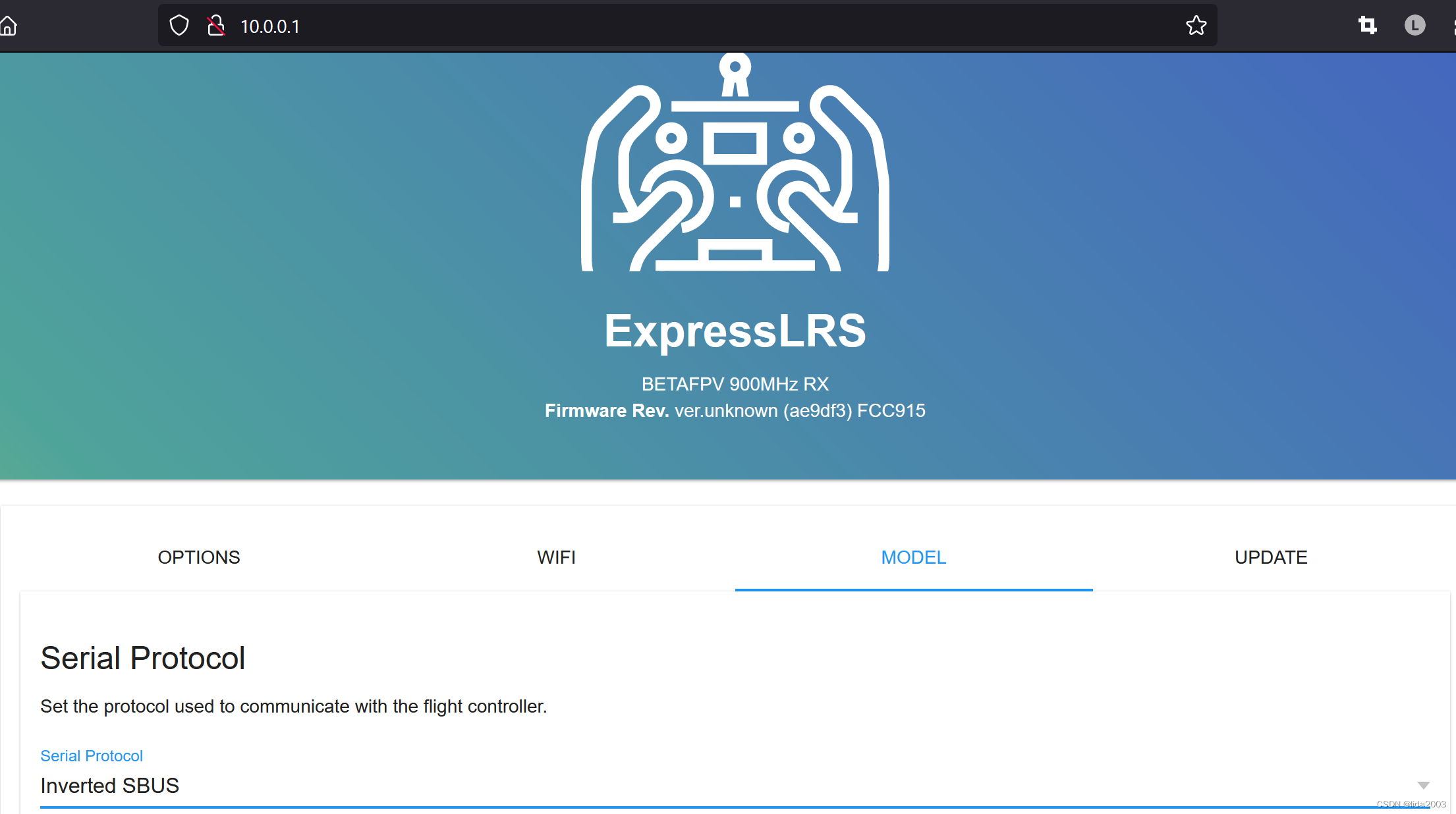
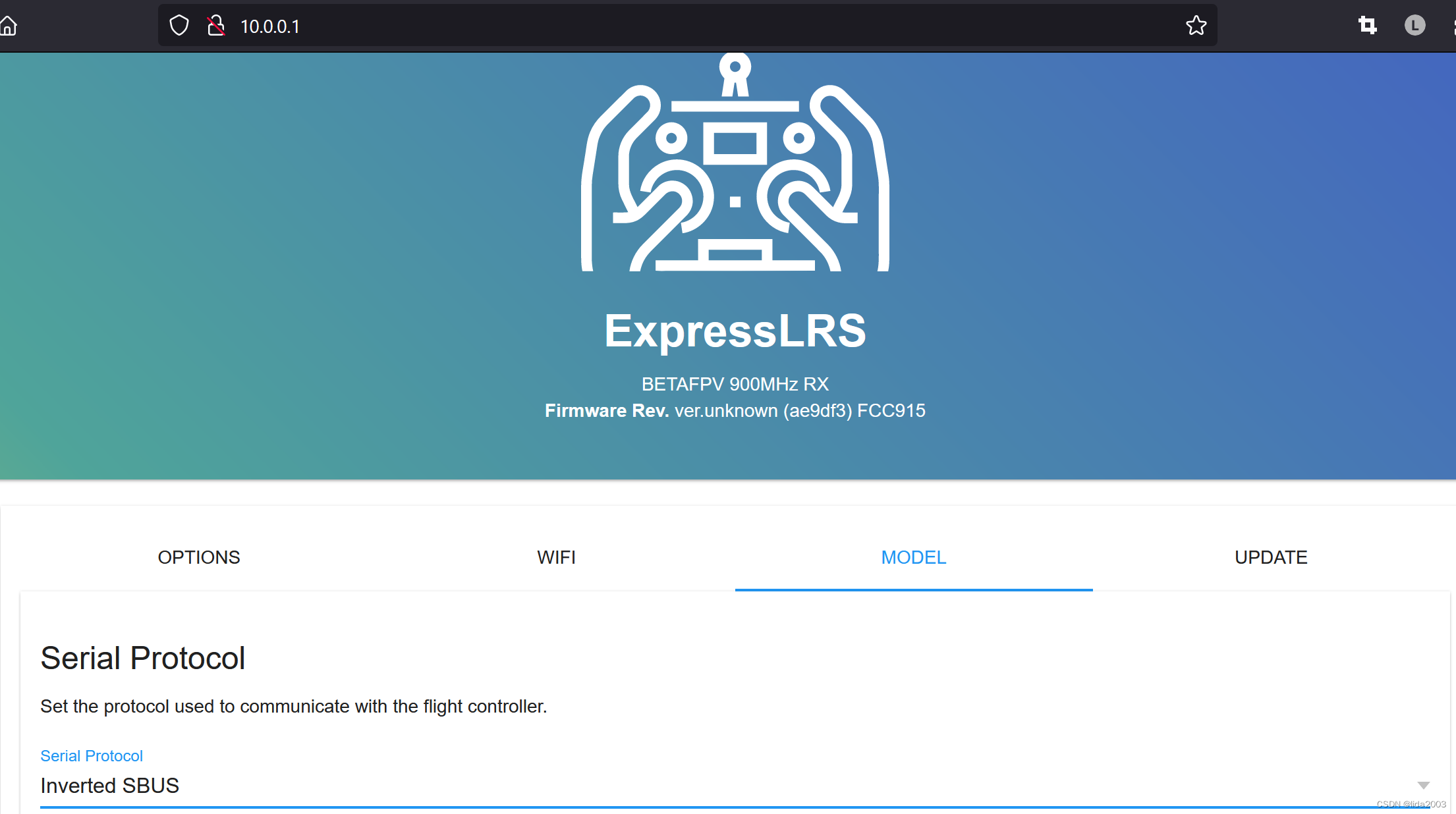
4.2 接收机sbus翻转
ELRS接收机配置inverted sbus信号。
4.3 飞控固件
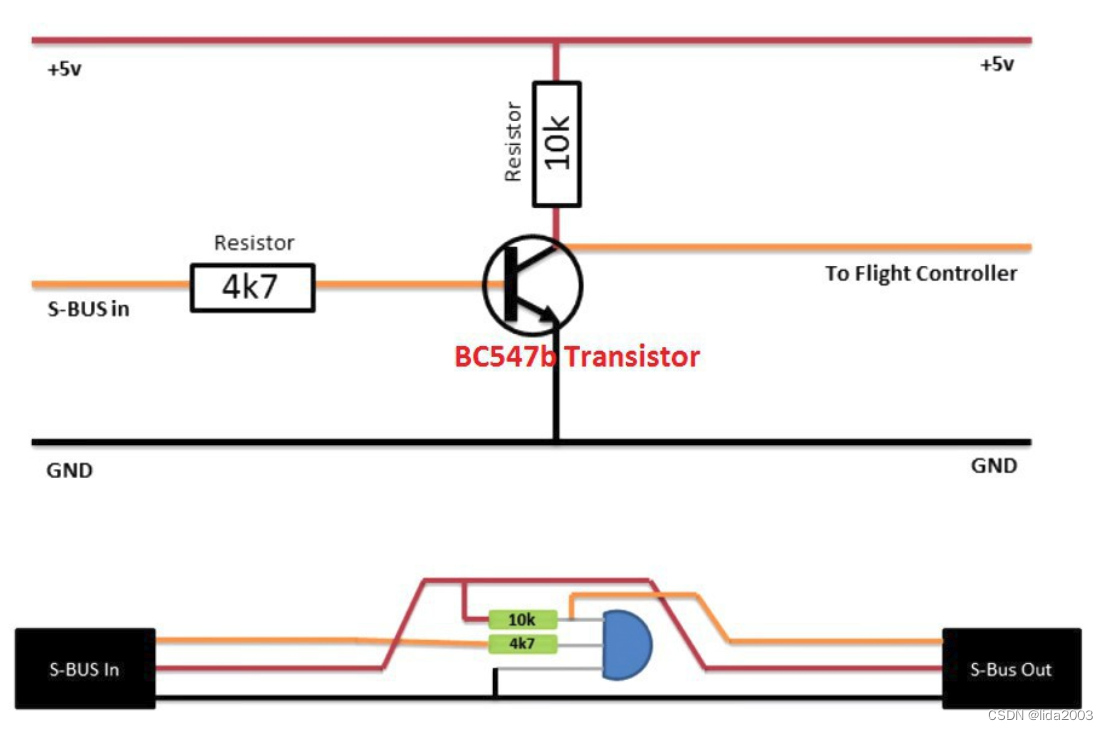
经过调查后发现:F405芯片与F3/F7不一样,芯片内部没有反向器。通常STM32F405的飞控板都是通过一个外置反向电路,来转换接收机的sbus信号。
来自参考资料【1】
A serial signal is composed of a series of High and Low electrical signals sent down a wire. In the standard serial protocol, a high signal is 0 and low is 1. In an inverted signal this is reversed so that a high is 1 and low is 0. You might think it makes more sense that low should always be 0 and high be 1 but electronics engineers decided that standard serial protocol should be the former.To convert a standard serial signal to an inverted signal you run it through an inverter chip (which can be as simple as a single transistor) which will simply change all high signals to low and vice versa.
F3 and F7 chips have inbuilt inverters on their hardware uarts, which enable them to transmit or receive serial signals in any polarity. For some reason, F4’s were designed without that feature and thus do not support inverted signals on their uarts.
通常“硬”的不行,我们总希望“软”的能解决。这个思路在软件技术发展条件下,确实能解决或者绕过很多硬件问题。这也是GPIO(General Purpose IO)的一些优势。
经代码分析,曾经F411的时代,确实有软串口来进行串口的扩展。同时也支持了采用定时器方案进行sbus协议解析。
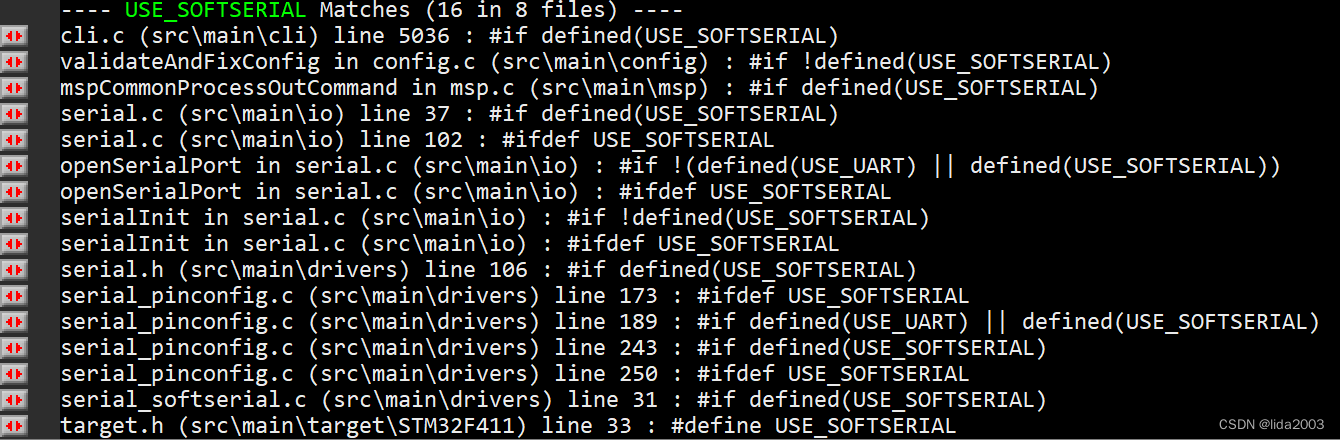
主要配置内容有以下几点:
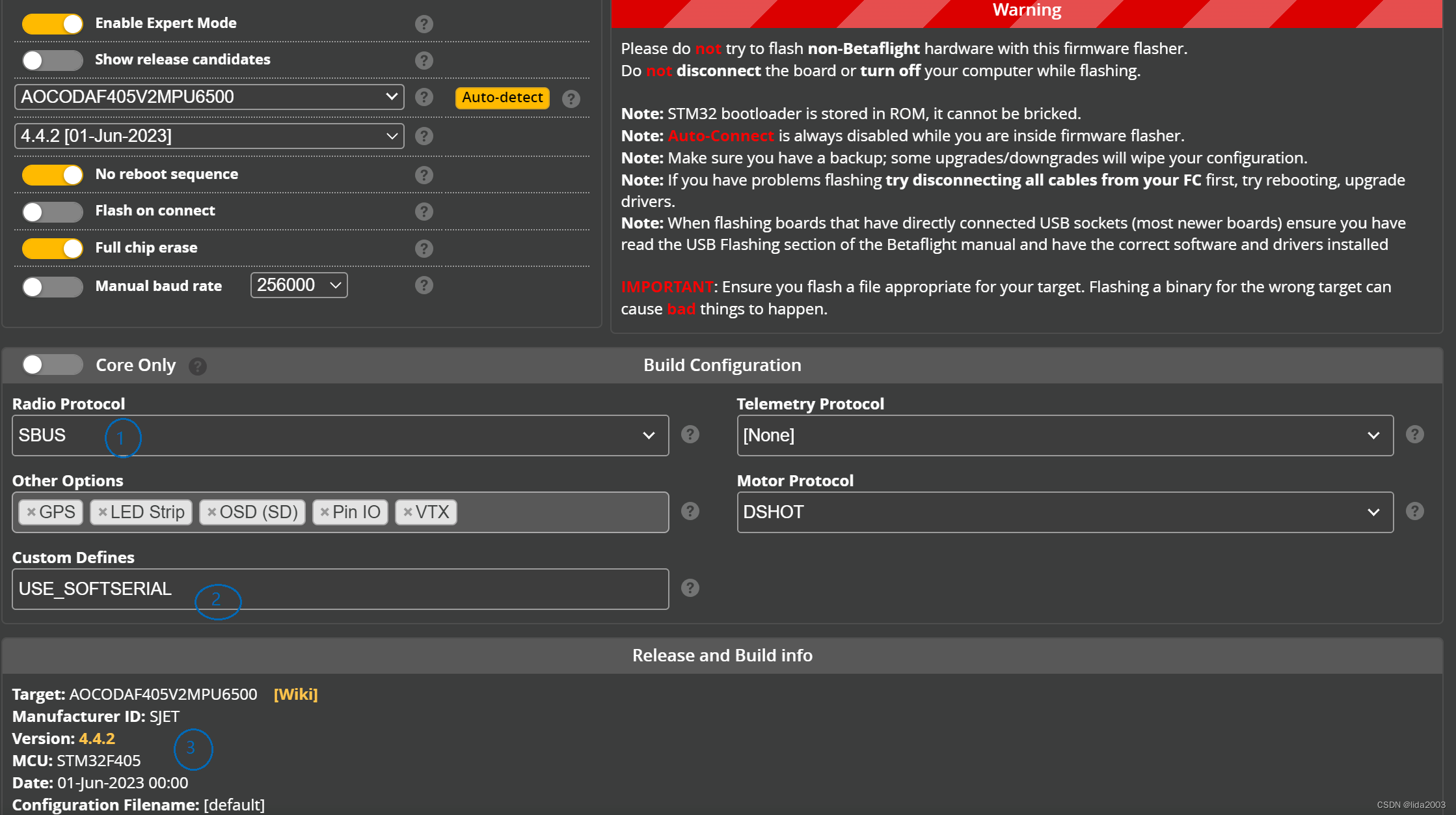
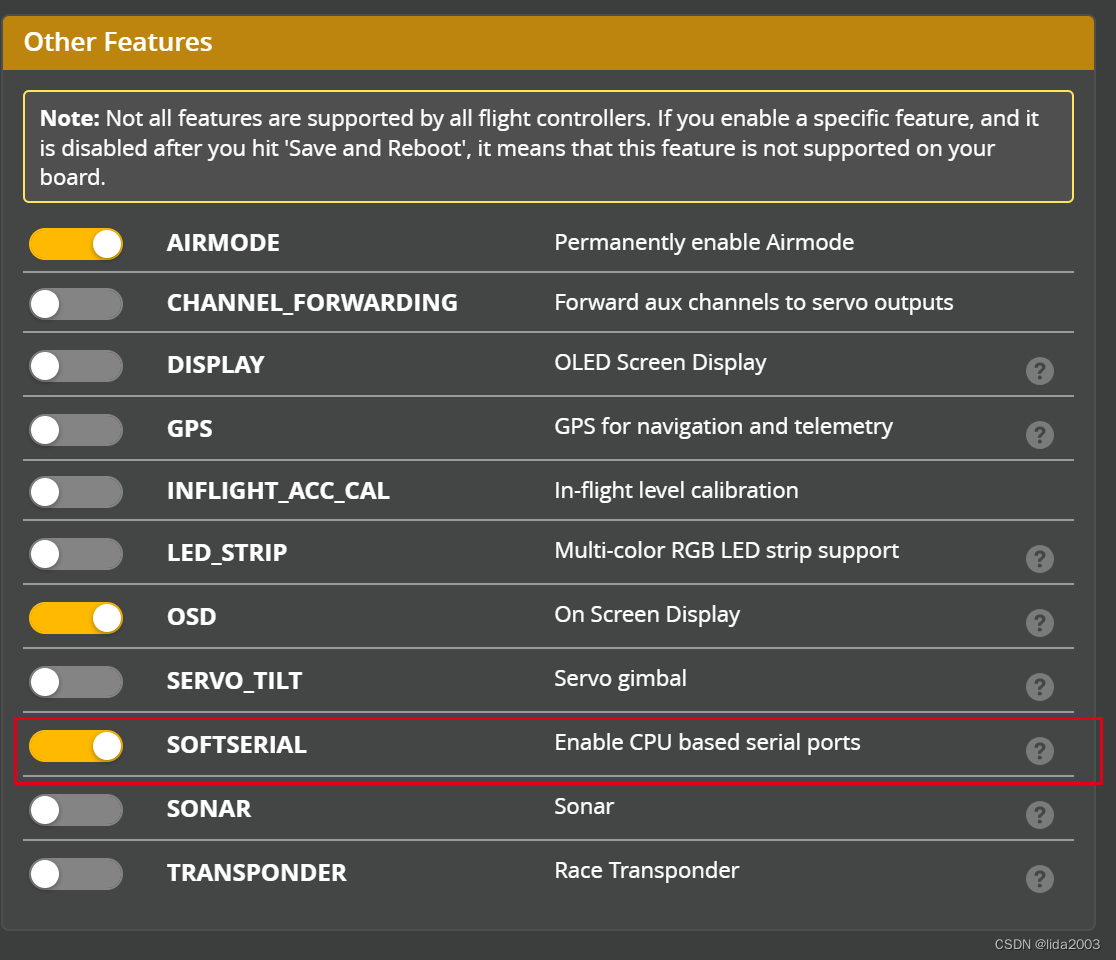
- 固件要确保配置定义
USE_SOFTSERIAL,以便将软串口代码进行编译; - 正确配置软件串口翻转状态:
SBUS协议接收机 ⇒
set serialrx_inverted = ON
Inverted SBUS接收机 ⇒set serialrx_inverted = OFF
5. 实测4.4.2固件
5.1 固件编译
- SBUS协议
- USE_SOFTSERIAL
- 4.4.2 BF固件 云编译
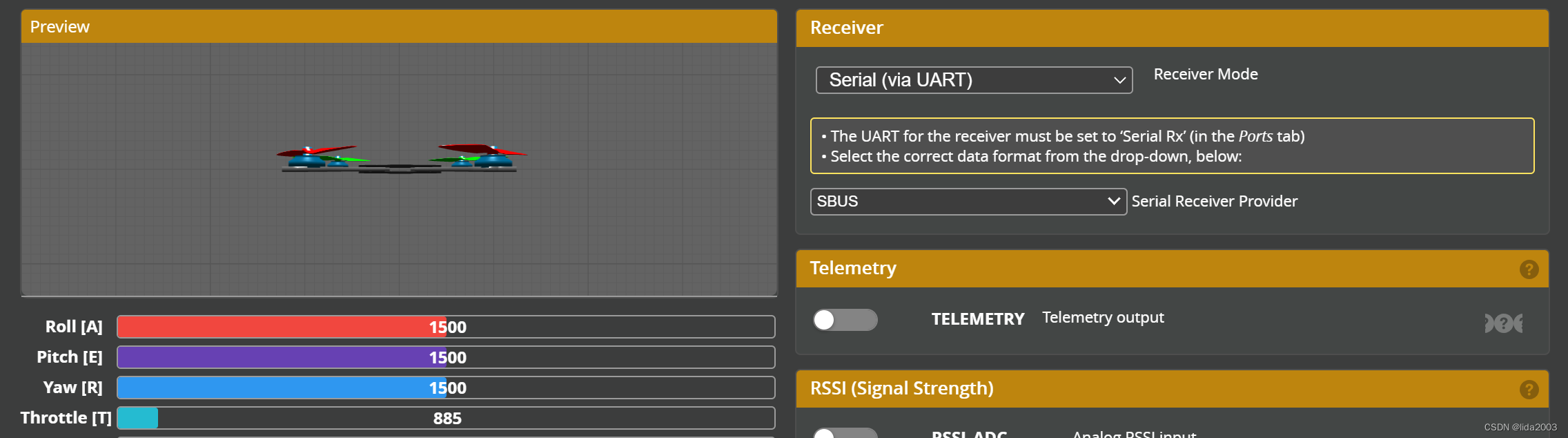
5.2 配置ELRS接收机
首先,使用ELRS接收机采用CRSF协议确保硬件接线正确UART2-RX与ELRS-TX连接,接收RC遥控正常(油门会高于没有接收机的885数值)。
当协议切换到SBUS时,ELRS-TX即ELRS-SBUS硬件接口。
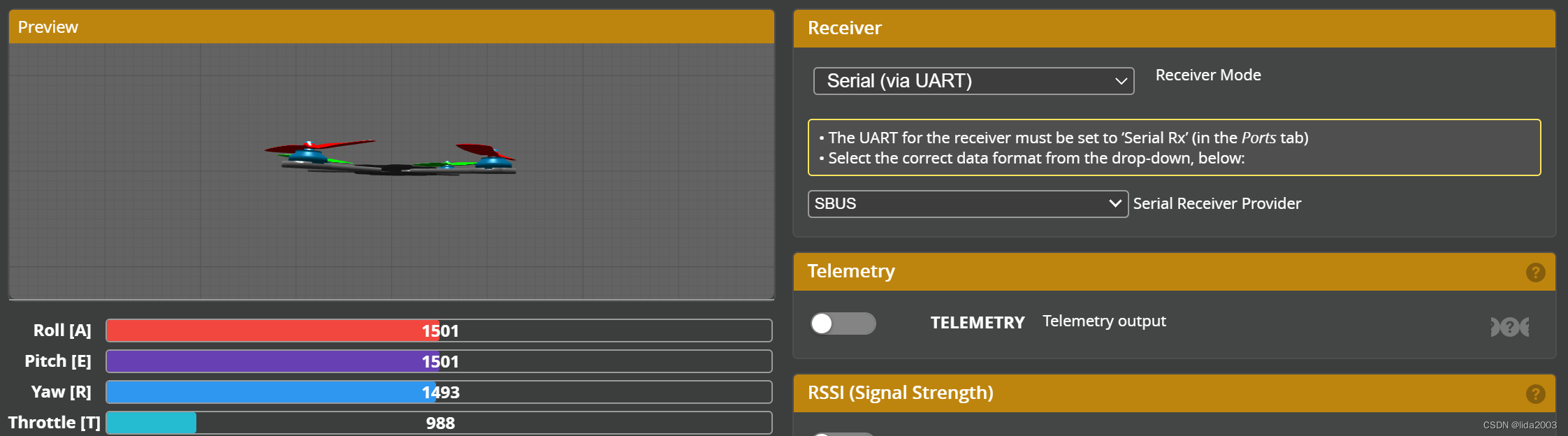
然后,配置Inverted SBUS协议,使用硬件UART2-RX确保接收机与飞控工作正常。
5.3 配置F405飞控
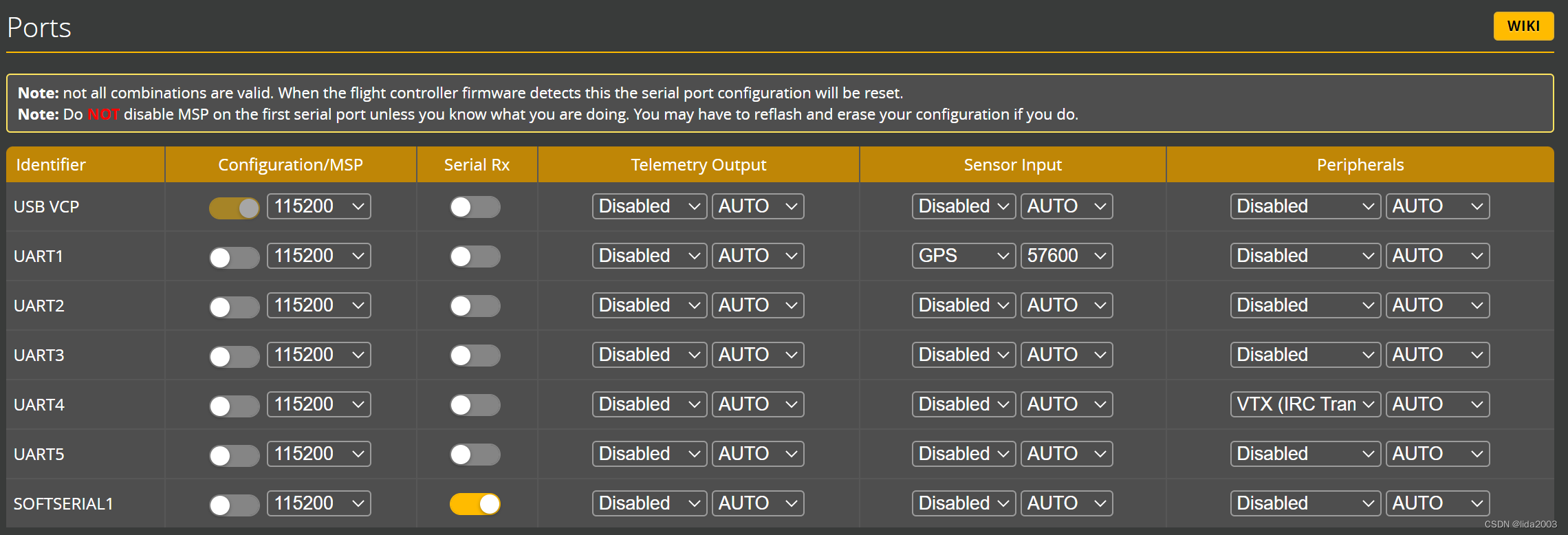
首先,配置软件串口。
然后,配置软件串口资源和端口。
# resource SERIAL_RX 11 A03Resource is set to A03
 最后,检查
最后,检查serialrx_inverted 状态。
# get serialrx_inverted
serialrx_inverted = OFF
Allowed values: OFF, ON
Default value: OFF
5.4 实测结果
测试结果:Betaflight 4.4.2 固件软件串口无法解析SBUS或inverted SBUS协议。
相关跟踪,详见:
- Does ELRS 3.3.0 supoort SBUS inverted? #2462
- Does BF support sbus on softserial? #13144
6. 总结
目前,大量的STM32F405飞控设计时,就考虑采用BJT/FET 【 2 】 ^{【2】} 【2】inverter进行硬件翻转SBUS信号与MCU兼容。
舍弃软件串口的可能原因大概有以下几点:
- 主流飞控F7/H7,以及后续的产品会在新片端内置inverter设计;
- 市场上大量STM32F405飞控硬件上也都采用的硬件兼容方式,提供SBUS焊盘;
- 软件串口占用大量的资源:定时器,中断、时序等;
- 固件新功能的发展,以及飞控趋势,软串口可能会淡出视线;
7. 参考资料
【1】What does it mean for SBUS to be an inverted protocol?
【2】difference-between-bjt-and-fet
【3】What is the advantage of SBUS over IBUS?
【4】Uninverted SBUS and Smart Port on Frsky Receivers
【5】Protocol decoder:sbus_futaba
【6】Tutorial: How to Setup Betaflight Softserial
这篇关于Betaflight关于STM32F405 SBUS协议兼容硬件电气特性问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






