本文主要是介绍opencv中边缘提取、孔洞填充以及阈值分割的实际应用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、应用中使用的opencv接口
1.1 阈值分割(threshold)
threshold 函数参数介绍
double threshold( InputArray src, OutputArray dst,double thresh, double maxval, int type );第一个参数为输入的图像,Mat类型的即可。
第二个参数为输出图像,且和输入图像有同等大小和类型
第三个参数为设定阙值的具体值
第四个参数 maxval是当第五个参数类型为CV_THRESH_BINARY和CV_THRESH_BINARY_INV是的最大值
1.2边缘提取
void Canny(Mat image, Mat edges,double threshold1,double threshold2, int aperture_size=3);1.3孔洞填充(findContours)
void findContours( InputOutputArray image, OutputArrayOfArrays contours,OutputArray hierarchy, int mode,int method, Point offset=Point())使用findContours会同步使用findContours()与边缘检测算法
2、待分割图片
带分割图片如下,需要将图片中的小章鱼都分割出来
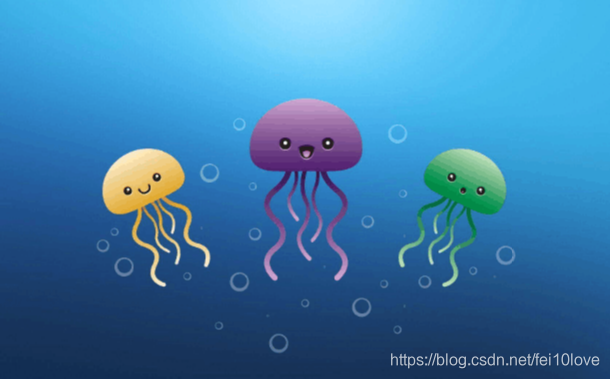
对图片的处理是先将图片进行颜色空间转换,有RGB转换成为HSV,再基于HSV的图片进行分割;下面三张图分别是进行颜色空间转换、边缘提取、以及孔洞填充后的效果,因为轮廓选择的时候不理想,所以最终分割的效果不好。后面会根据轮廓提取后的效果进一步分割;


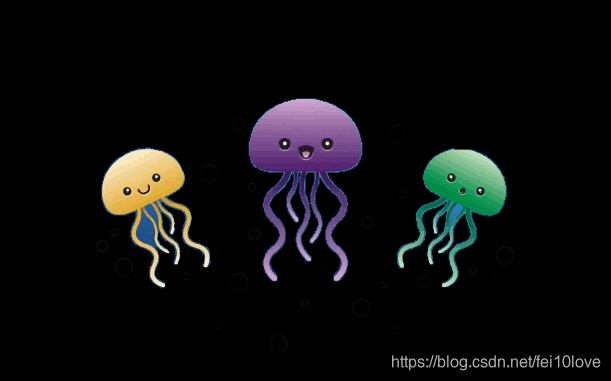
以上分割效果不好,后期的处理更偏向于像素的处理,分析样本中蓝色的像素值,把蓝色的区域去掉,代码示例如下:
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;void fillholds(Mat &src, Mat &dst, Mat &sourceImage)
{Mat m_with_border;copyMakeBorder(src, m_with_border, 1, 1, 1, 1, BORDER_CONSTANT, Scalar());copyMakeBorder(sourceImage, sourceImage, 1, 1, 1, 1, BORDER_CONSTANT, Scalar());vector<vector<Point>> contours;vector<Vec4i> hierarchy;// 提取边缘坐标findContours(m_with_border, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_NONE);Mat cvImg;sourceImage.copyTo(cvImg);if (!contours.empty()){for (unsigned int idx = 0; idx < contours.size(); idx++){drawContours(cvImg, contours, idx, Scalar::all(0), CV_FILLED, 8);}}Mat resImage = cvImg(Rect(1, 1, m_with_border.cols - 2, m_with_border.rows - 2));//使用孔洞填充的时候部分区域提取异常,对提取异常的区域重新Mat mask = resImage(Rect(0, 0, 230, resImage.rows));for (int i = 0; i < mask.rows; i++){uchar *ptR = resImage.ptr<uchar>(i);uchar *ptS = sourceImage.ptr<uchar>(i);for (int j = 0; j < mask.cols; j++){// 还处理分割失败已经边缘黑色区域if (ptR[j * 3 + 2] == 0 && ptR[j * 3 + 1] == 0 && ptR[j * 3] == 0){ptR[j * 3] = ptS[j * 3];ptR[j * 3 + 1] = ptS[j * 3 + 1];ptR[j * 3 + 2] = ptS[j * 3 + 2];}// 再对最后一个章鱼进行分割if (ptR[j * 3 + 2] > 150){ptR[j * 3] = 0;ptR[j * 3 + 1] = 0;ptR[j * 3 + 2] = 0;}}}// 对部分比分割不好的进行形态学变换Mat ele = getStructuringElement(MORPH_RECT, Size(3, 3));morphologyEx(resImage, resImage, MORPH_ERODE, ele);dst = resImage;}int main()
{string sPath = "C:\\Users\\Administrator\\Desktop\\img\\segment.png";Mat src = imread(sPath);Mat srcimg;src.copyTo(srcimg);Mat hsvSrc;cvtColor(src, hsvSrc, CV_BGR2HSV);Mat showImg(src.rows * 2, src.cols * 2, CV_8UC3);vector<Mat> vImg;split(hsvSrc, vImg);Mat img1 = vImg[0];Mat cannyBoredr;Canny(vImg[0], cannyBoredr, 60, 180, 3);Mat mask;threshold(cannyBoredr, mask, 0, 255, THRESH_OTSU);Mat dst1;fillholds(mask, dst1, srcimg);// 使用直接减的方式会将上一步形态学变换的部分区域显示出来,达不到最好的效果Mat resultImage = src - dst1;// 使用二次分割的方式再进行一次提取Mat segImg(dst1.rows, dst1.cols,CV_8UC3);segImg = Scalar(0);for (int i = 0; i < segImg.rows; i++){uchar *ptR = segImg.ptr<uchar>(i);uchar *ptS = src.ptr<uchar>(i);uchar *ptB = dst1.ptr<uchar>(i);for (int j = 0; j < segImg.cols; j++){if (ptB[j * 3] < 50){ptR[j * 3] = ptS[j * 3];ptR[j * 3 + 1] = ptS[j * 3 + 1];ptR[j * 3 + 2] = ptS[j * 3 + 2];}}}system("pause");return 0;
}代码处理中的中间图如下,第一张图是轮廓提取后的效果图,可以明显看见,左侧的小章鱼分割失败,此时就需要对这个小章鱼进行额外提取;第二张图是根据像素值分割后的掩码结果;由于掩码图经过膨胀炒作,所以直接使用原图减mask图就出现第三张图的效果;最后一张是基于像素重新处理后的图片,分割效果较好。




上述只是介绍了边缘提取、孔洞填充的使用,代码可读性比较差,后续重构;
https://mp.csdn.net/editor/html?spm=1010.2135.3001.5352
这篇关于opencv中边缘提取、孔洞填充以及阈值分割的实际应用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






