本文主要是介绍Opencv-图像插值与LUT查找表,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
图像像素的比较
白色是255,黑色是0
min(InputArray src1,InputArray src2,OutputArray dst)
max(InputArray src1,InputArray src2,OutpurArray dst
- src1:第一个图像矩阵,通道数任意
- src2:第二个图像矩阵,尺寸和通道数以及数据类型都需要与src1一致
- dst:保留对应位置较大(较小)灰度值后的图像矩阵,尺寸、通道数和数据类型与src1一致
LUT查找表
LUT查找表实际上就是一种映射规则

LUT(InputArray src,InputArray lut,OutputArray dst)
src:输入图像矩阵,其数据类型只能是CV_8U
lut:256个像素灰度值的查找表,单通道或者与src通道数相同
dst:输出图像矩阵,其尺寸与src相同,数据类型与lut相同
//LUT查找表第一层uchar lutFirst[256];for (int i = 0; i < 256; i++){if (i <= 100)lutFirst[i] = 0;if (i > 100 && i <= 200)lutFirst[i] = 100;if (i > 200)lutFirst[i] = 255;}Mat lutOne(1, 256, CV_8UC1, lutFirst);//LUT查找表第二层uchar lutSecond[256];for (int i = 0; i < 256; i++){if (i <= 100)lutSecond[i] = 0;if (i > 100 && i <= 150)lutSecond[i] = 100;if (i > 150 && i <= 200)lutSecond[i] = 150;if (i > 200)lutSecond[i] = 255;}Mat lutTwo(1, 256, CV_8UC1, lutFirst);//LUT查找表第三层uchar lutThird[256];for (int i = 0; i < 256; i++){if (i <= 100)lutThird[i] = 100;if (i > 100 && i <= 200)lutThird[i] = 200;if (i > 200)lutThird[i] = 255;}Mat lutThree(1, 256, CV_8UC1, lutThird);//拥有三通道的LUT查找表矩阵vector<Mat>mergeMats;mergeMats.push_back(lutOne);mergeMats.push_back(lutTwo);mergeMats.push_back(lutThree);Mat LutTree;merge(mergeMats, LutTree);Mat img = imread("2.jpg");Mat gray, out0, out1, out2;cvtColor(img, gray, COLOR_BGR2GRAY);LUT(gray, lutOne, out0);LUT(img, lutOne, out1);LUT(img, LutTree, out2);imshow("out0", out0);imshow("out1", out1);imshow("out2", out2);waitKey(0);
图像尺寸改变
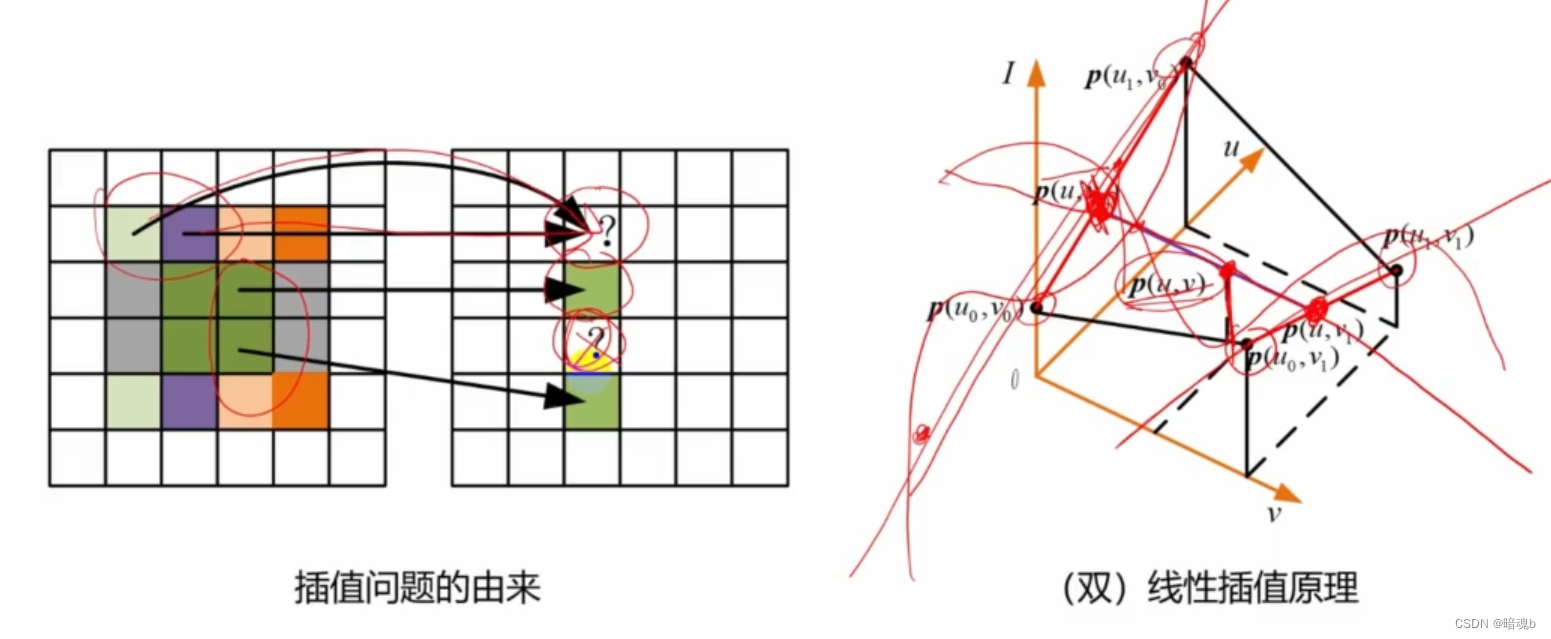
图像插值原理
在日常对图像进行操作的过程中会涉及到图像的放大与缩小,这一系列的操作都是通过插值法来实现的;opencv中resize()函数的实现原理0就是通过插值算法,如果不对应用某种算法进行设置,则默认采用双线性插值算法。
常用插值算法
最近邻法(Nearest Interpolation):计算速度最快,但是效果最差。
双线性插值(Bilinear Interpolation):双线性插值是用原图像中4(22)个点计算新图像中1个点,效果略逊于双三次插值,速度比双三次插值快,属于一种平衡美,在很多框架中属于默认算法。
双三次插值(Bicubic interpolation):双三次插值是用原图像中16(44)个点计算新图像中1个点,效果比较好,但是计算代价过大。
jj’
图像缩放
resize(InputArray src,OutputArray dst,Size dsize,double fx=0,double fy=0,int interpolation = INTER_LINEAR)
dsize:输出图像的尺寸
fx:水平轴的比例因子:如果将水平轴变为原来的两倍,则赋值为2
fy:垂直轴的比例因子
interpolation:插值方法的标志图像翻转
filp(InputArray src,OutputArray dst,int flipCode)
flipCode:翻转方式标志,数值大于0表示绕y轴进行翻转;数值等于0,表示绕x轴进行翻转,数值小于0表示绕两个轴旋转
图像拼接
//横向拼接要求高度一致
hconcat(InputArray src1,InputArray src2,OutputArray dst)
//垂直拼接要求宽度一致
vconcat(InputArray src1,InputArray src2,OutputArray dst)
Mat img = imread("2.jpg");Mat out,out1,out2,out3;// 缩小resize(img, out, Size(500,500),0, 0, INTER_AREA);// 最近邻插值resize(img, out1, Size(200, 200), 0, 0, INTER_NEAREST);//双线性插值resize(img, out2, Size(200, 200), 0, 0, INTER_LINEAR);//双三次插值resize(img, out3, Size(200, 200), 0, 0, INTER_CUBIC);Mat img_x, img_y, img_xy;flip(img, img_x, 0); //沿x轴对称翻转flip(img, img_y, 1); //沿y轴对称翻转flip(img, img_xy, -1);//沿x轴对称,再y轴对称
这篇关于Opencv-图像插值与LUT查找表的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





