本文主要是介绍HFSS带通滤波器的仿真实验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
- 实验目的和任务
实验目的:一、增加对滤波器理论方面的理解,提高用程序实现相关信号处理的能力;二、掌握HFSS实现带通滤波器混频的方法和步骤;三、掌握用HFSS实现带通滤波器的设计方法和过程,为以后的设计打下良好的基础。
实验任务:产生一个连续信号,包含低频、中频、高频分量,对其进行采样,进行频谱分析,并设计带通滤波器对信号进行滤波处理,观察滤波后信号的频谱
二、实验原理
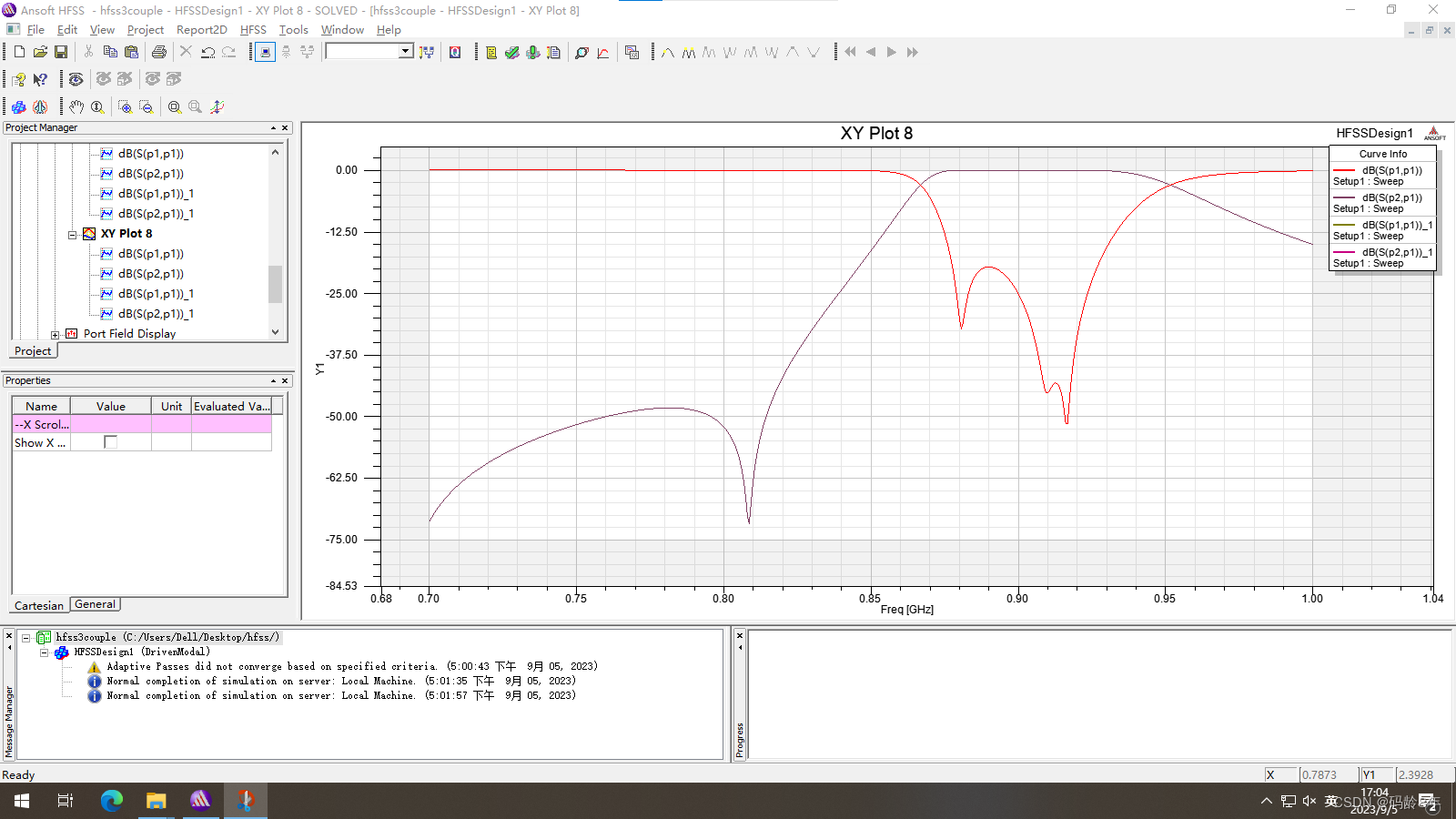
实验原理和电路说明带通滤波器是指能通过某一频率范围内的频率分量、但将其他范围的频率分量衰减到极低水平的滤波器,与带阻滤波器的概念相对。一个模拟带通滤波器的例子是电阻-电感-电容电路。这些滤波器也可以用低通滤波器同高通滤波器组合来产生.
三、实验设备
电脑+HFSS仿真软件
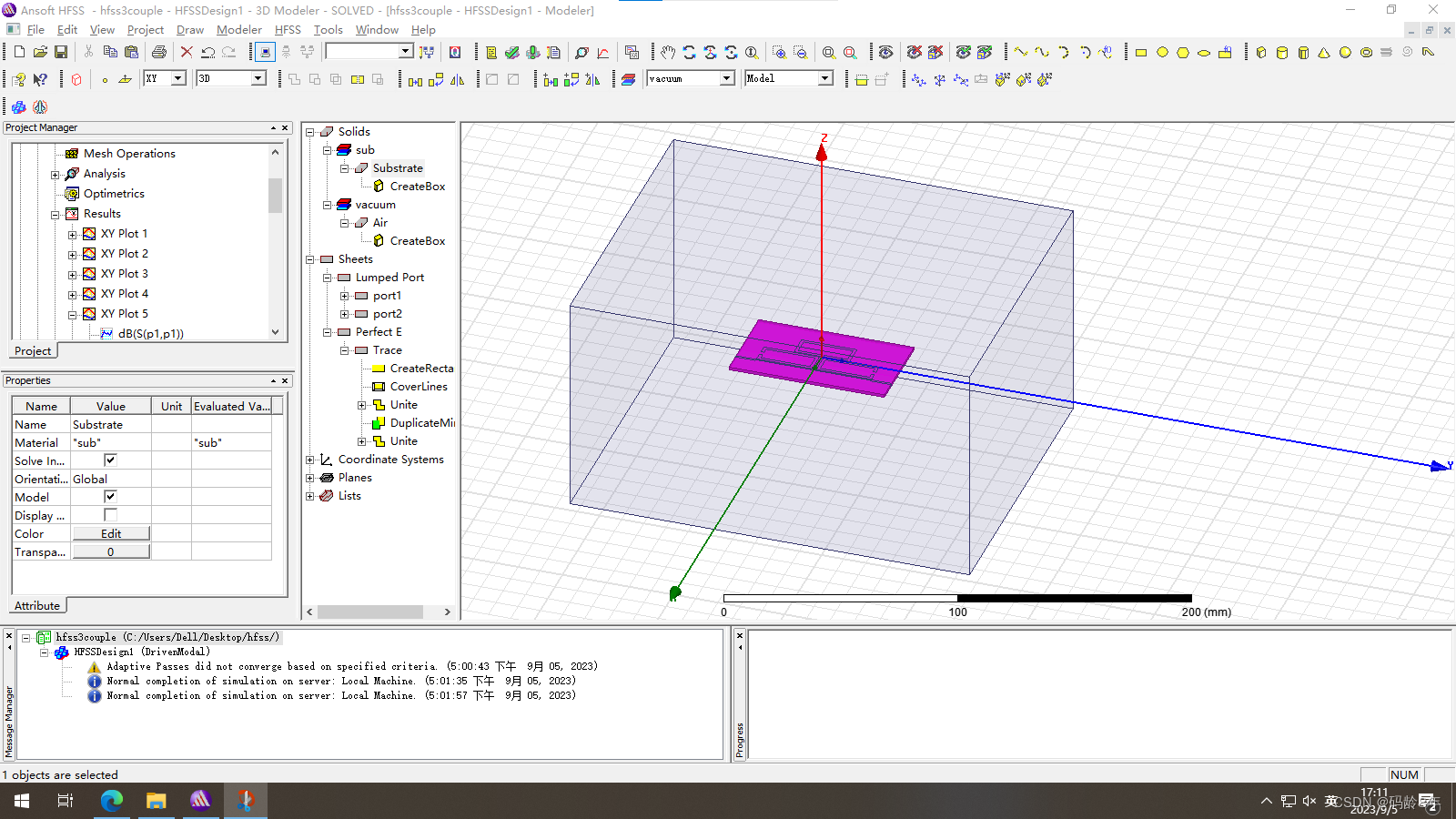
四、实验结果分析

五、实验心得与结论
在上第一次课使用 HFSS 软件有很多困难,比如说因为都是全英文,所以难免有的设置找不到,但只要细心检查和请教老师同学还是都能够解决的,比如在这次的实验中对于创建设计模型,需要熟练掌握各种原型物体的创建、各种建模操作——如旋转、复制、移动、布尔操作等的应用,以及模型材质的添加和分配等。关于边界条件和端口激励的设置,是HFSS应用和学习的重点和难点;“边界条件决定场”,还有激励。最后就得到最终的结果和仿真图像,还有简单的设计流程,希望下次能更好。
这篇关于HFSS带通滤波器的仿真实验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








