本文主要是介绍Yolov5s算法从训练到部署,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- PyTorch GPU环境搭建
- 查看显卡CUDA版本
- Anaconda安装
- PyTorch环境安装
- PyCharm中验证
- 训练算法模型
- 克隆Yolov5代码工程
- 制作数据集
- 划分训练集、验证集
- 修改工程
- 相关文件配置
- 预训练权重文件配置
- 数据文件配置
- 模型文件配置
- 超参数配置
- 测试训练出来的算法模型
- 量化转换算法模型
- pt转onnx
- onnx转rknn
- 部署到RK系列板子
本文主要介绍的是使用PyTorch开源神经网络框架GPU版本训练自己制作数据集的Yolov5s目标检测算法,并量化转化为瑞芯微RK系列搭载的NPU加速单元可以推理的rknn格式模型全流程。
PyTorch GPU环境搭建
使用Anaconda虚拟Python环境,在此环境上安装相应显卡驱动版本的PyTorch GPU版本,在PyCharm上训练测试。
查看显卡CUDA版本
显卡型号可以去设备管理器中查看,显卡驱动以及CUDA版本可以在cmd输入以下命令查看:
nvidia-smi
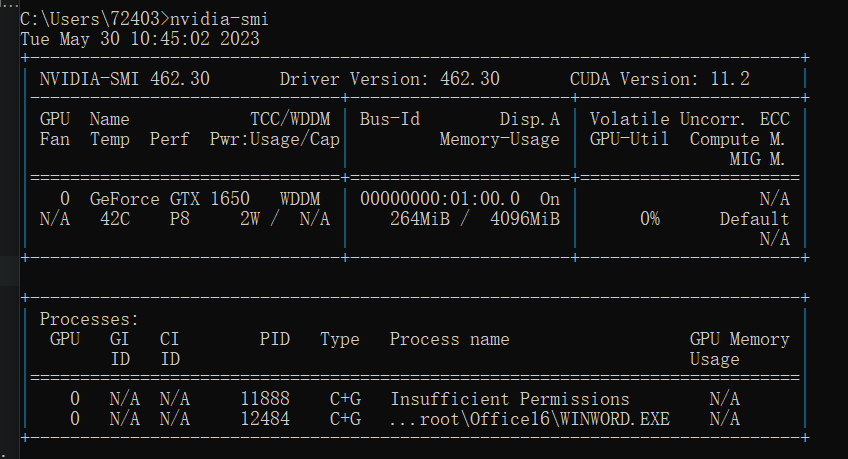
可以根据结果看到驱动版本以及CUDA版本,这个CUDA版本要记好,是最高支持的CUDA版本,安装PyTorch时,要安装CUDA版本以下的,根据我的情况,我在接下来要安装CUDA11.2以下版本的PyTorch。
Anaconda安装
去Anaconda官网下载就好,Anaconda | The World’s Most Popular Data Science Platform,,傻瓜式安装。
PyTorch环境安装
上一步Anaconda安装好后,会在开始栏中有Anaconda终端 Anaconda Prompt,后面会经常使用,可以在桌面上创建一个快捷方式,打开。
可以使用如下命令查看有哪些环境存在:
conda env list
新装的肯定只有一个base环境,我们可以再创建一个pytorch虚拟环境来专门安装PyTorch,我的理解是Anaconda相当于VMware一样,WMware是虚拟出操作系统,Anaconda是虚拟出不同的Python环境,我们当然可以在Anaconda下创建多个环境来安装不同版本的PyTorch。
创建一个名叫pytorch(随意)的Python3.8的虚拟环境:
conda create -n pytorch python=3.8
当安装好之后呢,就会多出来一个与base并列的pytorch环境,切换到此环境上:
conda activate pytorch
下面就到了安装PyTorch-GPU的环境了,可能会出现各种各样的问题,出现的问题也都不一样,主要还是因为PyTorch包在国外。
给环境换国内源;
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/
conda config --set show_channel_urls yes
生成的配置在系统用户.condarc文件下,也可直接更改此文件。
然后去PyTorch官网PyTorch去找适合自己显卡CUDA版本的安装命令,最新版可能没有适合的版本,去历史版本中Previous PyTorch Versions | PyTorch去寻找,
我发现这一版本挺合适:
conda install pytorch==1.10.1 torchvision==0.11.2 torchaudio==0.10.1 cudatoolkit=10.2 -c pytorch
一定不要把后面的 '-c pytorch (有的版本还有-c conda-forge)'也复制下来,因为这样还是在国外源中下载。pytorch虚拟环境中运行:
conda install pytorch==1.10.1 torchvision==0.11.2 torchaudio==0.10.1 cudatoolkit=10.2
这里总结下可能出现的问题以及解决办法:
- 安装过程中不能科学上网
- 可能要安装的版本镜像内没有,换其他镜像
- 当前网络频繁访问镜像,被拒绝访问了,换一个网络试试
- 实在安装不成功也可离线安装
PyCharm中验证
在官网中傻瓜式安装,安装免费社区版就已经够用了。
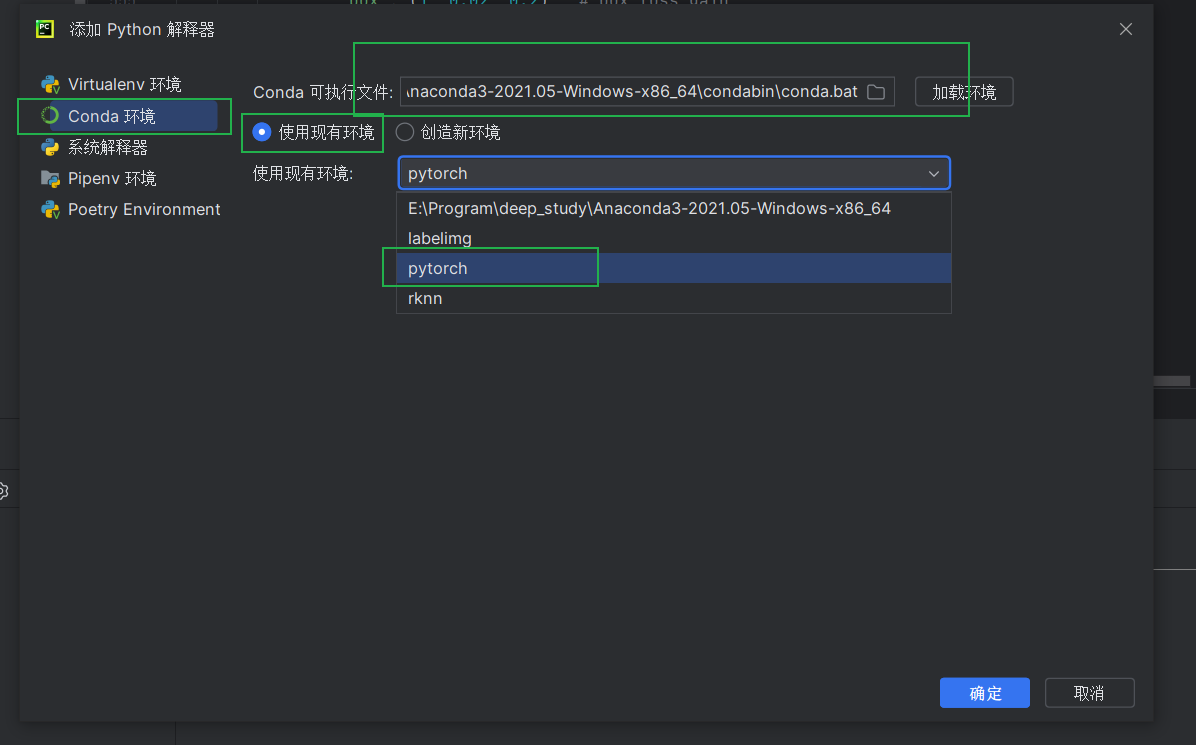
新建一个工程后,选择在Anaconda里已经安装了PyTorch的虚拟环境:

验证脚本:
import torch
print(torch.cuda.is_available())
print(torch.backends.cudnn.is_available())
print(torch.cuda_version)
print(torch.backends.cudnn.version())
如果打印的是false,也就是没调用GPU版本的,很有可能是安装了有cpuonly的模块,使用 conda list查看,如果有,用 conda uninstall cpuonly 就好了!
训练算法模型
这里以训练口罩算法模型为例。
克隆Yolov5代码工程
去github仓库克隆GitHub - ultralytics/yolov5 at v5.0这个版本即可。
把工程下repuirements.txt依赖包安装一下:
pip install -r requirements.txt -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
阿里云 http://mirrors.aliyun.com/pypi/simple/
中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple/
豆瓣(douban) http://pypi.douban.com/simple/
清华大学 https://pypi.tuna.tsinghua.edu.cn/simple/
中国科学技术大学 http://pypi.mirrors.ustc.edu.cn/simple/
制作数据集
首先要准备含有检测目标(戴口罩和不带口罩)的图片集,这里我使用OpenCV库写了一个小工具,显示摄像头实时视频流,按下空格键就会保存当前图片帧数据以当前时间戳的方式命名(不会造成重复)保存到指定文件夹。
/************************************************************************************************************** @Description: 从videoUrl中按下空格截取图片到directory目录中,以时间戳命名*** @param {string} &videoUrl 视频流*** @param {string} &directory 截取图片保存目录*** @return {void}***********************************************************************************************************/
void capture_imgs(const std::string &videoUrl, const std::string &directory)
{cv::Mat frame;int key;datetime_t dt;string imgName;char buf1[DATETIME_FMT_BUFLEN];cv::VideoCapture capture;if(videoUrl.size()&&videoUrl.front()=='0'){capture.open(atoi(videoUrl.c_str()));}else{capture.open(videoUrl);}if (!capture.isOpened()){printf("could not read this video file...\n");return;}int fps = capture.get(cv::CAP_PROP_FPS);int delay = 1;if (fps){delay = 1000 / fps;cout << "delay:" << delay << endl;cout << "fps:" << fps << endl;}mkdir(directory.c_str());while (1){if (capture.read(frame)){imshow(videoUrl, frame);key = waitKey(1);if (key == 27){break;}else if (key == 32) // 空格{dt = datetime_now();imgName = datetime_fmt_iso(&dt, buf1);string filePath = directory + imgName;filePath.pop_back();filePath += ".jpg";filePath = regex_replace(filePath, regex(":"), "-");printf("imgname:%s\n", filePath.c_str());if (imwrite(filePath, frame)){printf("save success!\n");}else{printf("save fail!\n");}}}else{capture.release(); // 必须加release释放,否则会内存泄漏cout << "未获取到帧数据,重新获取打开" << endl;if (videoUrl.size() && videoUrl.front() == '0'){capture.open(atoi(videoUrl.c_str()));}else{capture.open(videoUrl);}}}
}
然后使用labelImg目标检测标注工具生成这些图片的标签文件,注意labelImg必须是Python3.9的版本,我们可以使用Anaconda虚拟出来一个,手动绘制图片内所有戴口罩或不带口罩区域,然后选择标签,绘制出图片区域内所有目标,切换下一张图片后,会自动生成Yolov5s支持的YOLO格式标签文件。标注界面如下图所示:

YOLO标签格式为:<object-class> <x> <y> <width> <height>,object-class是目标类型的整形索引,x、y是目标的中心坐标,width、height是目标的宽和高。这些坐标是通过归一化处理,其中x、width是使用原图的width进行归一化处理;而y、height是使用原图的height进行归一化处理得到的。以上图生成的标签为例,生成的标签为:1 0.576302 0.344907 0.096354 0.184259,说明如下表所示:
| 1 | 0.576302 | 0.344907 | 0.096354 | 0.184259 |
|---|---|---|---|---|
| 标签的类别 | 框的中心横坐标与图像宽度之比 | 框的中心横坐标与图像宽度之比 | 框的宽度 | 框的高度 |
结构:
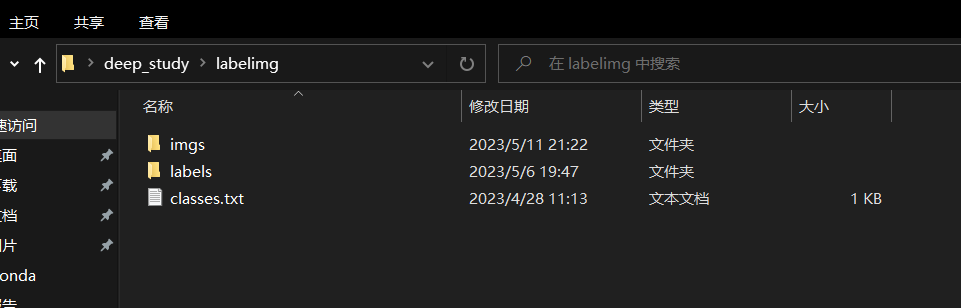
imgs:要标注的图片存放目录
labels:生成的标签文件存放目录
classes.txt:标签目录,增加这个的好处是在labelImg中可以直接选择,而不用在再输入标签。
划分训练集、验证集
把生成的标签文件与图像集还要划分为训练集与验证集,这里我写了一个脚本使用随机种子数按照训练集与验证集以3:1的比例随机划分,我看网上有些教程需要先将yolo格式(txt)转为voc格式(xml),再用代码直接将voc格式转为yolo并直接划分训练集与验证集,不然会出错,我认为完全没有这个必要,我也验证过,下面的代码就是yolo直接划分,没有一点问题,就算是手动不用程序划分也是没问题的。
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
import shutil
classes = ["no_mask", "mask"]
TRAIN_RATIO = 75 #训练集所占比例
def clear_hidden_files(path):dir_list = os.listdir(path)for i in dir_list:abspath = os.path.join(os.path.abspath(path), i)if os.path.isfile(abspath): #文件if i.startswith("._"):os.remove(abspath)else: #文件夹clear_hidden_files(abspath)
def convert(size, box):dw = 1. / size[0]dh = 1. / size[1]x = (box[0] + box[1]) / 2.0y = (box[2] + box[3]) / 2.0w = box[1] - box[0]h = box[3] - box[2]x = x * dww = w * dwy = y * dhh = h * dhreturn (x, y, w, h)
def convert_annotation(image_id):in_file = open('./data/source/voc/%s.xml' % image_id) #voc格式out_file = open('./data/source/yolo/%s.txt' % image_id, 'w') #yolo格式tree = ET.parse(in_file)root = tree.getroot()size = root.find('size')w = int(size.find('width').text)h = int(size.find('height').text)for obj in root.iter('object'):difficult = obj.find('difficult').textcls = obj.find('name').textif cls not in classes or int(difficult) == 1:continuecls_id = classes.index(cls)xmlbox = obj.find('bndbox')b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),float(xmlbox.find('ymax').text))bb = convert((w, h), b)out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')in_file.close()out_file.close()wd = os.getcwd()
data_base_dir = os.path.join(wd, "./data/")
if not os.path.isdir(data_base_dir):os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "source/")
if not os.path.isdir(work_sapce_dir):os.mkdir(work_sapce_dir)
image_dir = os.path.join(work_sapce_dir, "imgs/")
if not os.path.isdir(image_dir):print("没有图片文件夹!\n")exit(0)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "yolo/")
if not os.path.isdir(yolo_labels_dir):print("没有yolo标签文件夹")exit(0)
clear_hidden_files(yolo_labels_dir)yolov5_images_dir = os.path.join(data_base_dir, "images/")
if os.path.isdir(yolov5_images_dir):shutil.rmtree(yolov5_images_dir)
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if os.path.isdir(yolov5_labels_dir):shutil.rmtree(yolov5_labels_dir)
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "verify/")
if not os.path.isdir(yolov5_images_test_dir):os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "verify/")
if not os.path.isdir(yolov5_labels_test_dir):os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
verify_file = open(os.path.join(wd, "yolov5_verify.txt"), 'w')
# train_file.close()
# verify_file.close()
# train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
# verify_file = open(os.path.join(wd, "yolov5_verify.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image filesfor i in range(0, len(list_imgs)):path = os.path.join(image_dir, list_imgs[i])if os.path.isfile(path):image_path = image_dir + list_imgs[i]image_name = list_imgs[i](nameWithoutExtention, extention) = os.path.splitext(image_name)label_name = nameWithoutExtention + '.txt'label_path = os.path.join(yolo_labels_dir, label_name)else: #如果不存在图片文件,就不再找标签continue#随机划分prob = random.randint(1, 100)print("Probability: %d" % prob)if (prob < TRAIN_RATIO): # train datasetif os.path.exists(label_path):train_file.write(image_path + '\n')copyfile(image_path, yolov5_images_train_dir + image_name)copyfile(label_path, yolov5_labels_train_dir + label_name)else: # verify datasetif os.path.exists(label_path):verify_file.write(image_path + '\n')copyfile(image_path, yolov5_images_test_dir + image_name)copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
verify_file.close()
生成的文件结构如下图所示:

修改工程
相关文件配置
预训练权重文件配置
Yolov5又分为Yolov5s、Yolov5m、Yolov5l、Yolov5x,按照其所含的残差结构的个数依次增多,网络的特征提取、融合能力不断加强,检测精度得到提高,但相应的检测花费的时间和消耗的资源也依次在增加。因为训练出的算法模型最终是要部署到嵌入式神经网络处理器上,考虑到其算力性能以及系统实时性等多方面的考量,最终选择Yolov5s版本来进行。使用预训练权重呢,一般是为了缩短网络的训练时间,达到更好的精度。
我们去GitHub Releases · ultralytics/yolov5 (github.com)找到对应版本的预训练权重 yolov5s.pt,放到weights目录下。
数据文件配置
在data下找到voc.yaml,复制一份再命名为mask.yaml,将其修改为:
# download command/URL (optional)
#download: bash data/scripts/get_voc.sh# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
train: divide_yoloData/data/images/train/
val: divide_yoloData/data/images/verify/# number of classes
nc: 2# class names
names: [ 'no_mask', 'mask']
注释到下载字段,train字段存放训练集图片目录,val字段存放验证集图片目录,刚开始很好奇不用配置标签目录,我的理解是会自动寻找labels目录。
模型文件配置
在models目录下找到yolov5s.yaml,复制一份命名为mask.yaml,把nc字段修改为2即可。
超参数配置
找到train.py的main函数入口,修改几个超参数,模型主要参数解析如下:
opt模型主要参数解析:--weights:初始化的权重文件的路径地址--cfg:模型yaml文件的路径地址--data:数据yaml文件的路径地址--hyp:超参数文件路径地址--epochs:训练轮次--batch-size:喂入批次文件的多少--img-size:输入图片尺寸--rect:是否采用矩形训练,默认False--resume:接着打断训练上次的结果接着训练--nosave:不保存模型,默认False--notest:不进行test,默认False--noautoanchor:不自动调整anchor,默认False--evolve:是否进行超参数进化,默认False--bucket:谷歌云盘bucket,一般不会用到--cache-images:是否提前缓存图片到内存,以加快训练速度,默认False--image-weights:使用加权图像选择进行训练--device:训练的设备,cpu;0(表示一个gpu设备cuda:0);0,1,2,3(多个gpu设备)--multi-scale:是否进行多尺度训练,默认False--single-cls:数据集是否只有一个类别,默认False--adam:是否使用adam优化器--sync-bn:是否使用跨卡同步BN,在DDP模式使用--local_rank:DDP参数,请勿修改--workers:最大工作核心数--project:训练模型的保存位置--name:模型保存的目录名称--exist-ok:模型目录是否存在,不存在就创建
将预训练权重的相对路径放到这里:
parser.add_argument('--weights', type=str, default='weights/yolov5s.pt', help='initial weights path')
将数据文件、模型文件分别放到这里:
parser.add_argument('--cfg', type=str, default='models/mask.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/mask.yaml', help='data.yaml path')
epochs训练次数、batch-size每次投入的图片次数、workers CPU的核心数,都要根据自己的电脑配置情况改。
超参数配置完成后,就可以开始训练了,如果报错可能是以下问题:
-
在utils路径下找到datasets.py这个文件,将里面的81行里面的参数num_workers改成0
-
添加SPPF类,需要到github下载yolov5-6.0,打开文件找到models文件下的common.py,到里面复制SPPF类,并将这段代码(下面)复制到自己项目文件的models/common.py里去,放在了149的SPP类之后。
class SPPF(nn.Module):# Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocherdef __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))super().__init__()c_ = c1 // 2 # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c_ * 4, c2, 1, 1)self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)def forward(self, x):x = self.cv1(x)with warnings.catch_warnings():warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warningy1 = self.m(x)y2 = self.m(y1)return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))
然后就可以愉快的去玩耍,让电脑吭哧吭哧的训练模型了。
如果想要停止后接着上次的结果继续训练,当然也是可以的,好像就算更新过数据集后也是可以接着训练的,步骤:
- 找到exp数值最大的目录下的opt.yaml文件,修改你想改的配置(epochs、batch-size等)
- 把超参数 --resume 改为True
测试训练出来的算法模型
训练结束后可以在终端输入以下命令启用tensorbord查看训练结果:
tensorboard --logdir=runs
打开网址就可以看到,里面有很多图表,很多也看不懂什么意思。
训练好的模型在 runs/train/exp数字最大/weights 的目录下,有最后一次(last)和最好的(best)两个模型。
在detect.py下可以测试算法,–weights 配置为算法模型文件的路径,–source 配置为要推理的数据来源,可以为图片、电脑摄像头(0)、RTSP网络摄像头等。
测了一下训练出来的还是还不错的。

量化转换算法模型
训练出来pt格式的算法模型的Tensor精度是单精度浮点型的float32,而RK系列支持的是整型的uint8,想要最终部署到板子中,还需要进行一系列量化最终转换为rknn格式的算法模型。
pt转onnx
工程下的models/export.py,–weights 配置为算法模型文件的路径,此外还需要修改models/yolo.py文件的后处理部分,将class Detect(nn.Module) 类的子函数forward改为(训练的时候不能改):
def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # convreturn x
然后根据介绍执行脚本即可完成转换。
onnx转rknn
需要用到RKNN Toolkit,RK不同系列板子用到的版本不一样,在Windows、Ubuntu系统都可以完成转换,但windows系统不支持模拟仿真功能不全,所以最好是在Ubuntu上进行。
我是在Ubuntu20.04上安装的,在Anaconda上虚拟出的Python3.8环境中安装所需依赖。
GitHub仓库中doc有pdf中文手册专门讲解Toolkit
在example/onnx/yolov5工程下,把onnx模型路径、带预测图片路径、标签类别、板子平台更改下运行即可完成onnx到rknn的转换。
量化转换后的rknn模型通过Netron神经网络可视化工具可以查看网络结构以及模型参数:
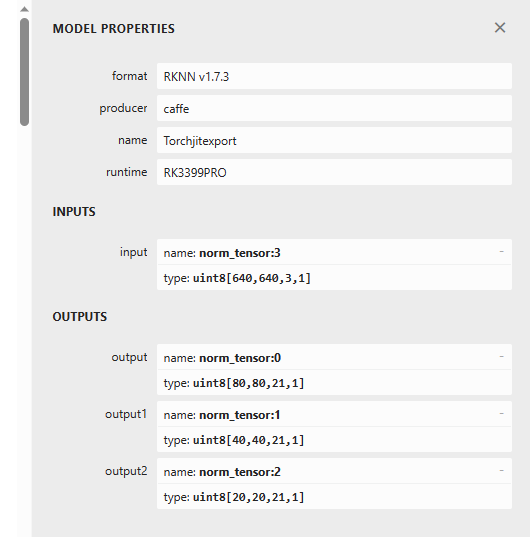
从上图可以看出算法模型已经量化为uint8精度,支持板子Tensor整形精度。
部署到RK系列板子
在GitHub仓库rknpu、rknpu2、RK3399Pro_npu有各自板子适用的python、c++版本npu推理例程。
GitHub - rockchip-linux/rknpu
例程一般都是推理图片的,可以先根据例程把推理流程给熟悉一下给跑通,然后再进行拉取摄像头流实时推理、多流多算法等更进一步的探索。
这篇关于Yolov5s算法从训练到部署的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









