本文主要是介绍【OpenCV 例程300篇】49. 直方图处理之局部直方图处理(cv2.createCLAHE),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
『youcans 的 OpenCV 例程300篇 - 总目录』
【youcans 的 OpenCV 例程300篇】49. 直方图处理之局部直方图处理(cv2.createCLAHE)
图像直方图是反映图像像素分布的统计表。 灰度直方图是图像灰度级的函数,用来描述每个灰度级在图像矩阵中的像素个数。
直方图均衡和直方图匹配都是基于整幅图像的灰度分布进行全局变换,并非针对图像局部区域的细节进行增强。
直方图处理对于局部同样适用,局部直方图处理的思想是基于像素邻域的灰度分布进行直方图变换处理。
局部直方图处理的过程是:
(1)设定某一大小的模板(矩形邻域),在图像中沿逐个像素移动;
(2)对每个像素位置,计算模板区域的直方图,对该局部区域进行直方图均衡或直方图匹配变换,变换结果只用于模板区域中心像素点的灰度值修正;
(3)模板(邻域)在图像中逐行逐列移动,遍历所有像素点,完成对整幅图像的局部直方图处理。
OpenCV 提供了类 cv2. createCLAHE 用于创建自适应均衡化的对象和方法,可以实现局部直方图处理。
函数说明:
cv2.createCLAHE([, clipLimit[, tileGridSize]]) → retval
参数说明:
- clipLimit:颜色对比度的阈值,可选项,默认值 8
- titleGridSize:局部直方图均衡化的模板(邻域)大小,可选项,默认值 (8,8)
cv2. createCLAHE 是一种限制对比度自适应直方图均衡化方法(Contrast Limited Adaptive Hitogram Equalization),采用了限制直方图分布的方法和加速的插值方法。
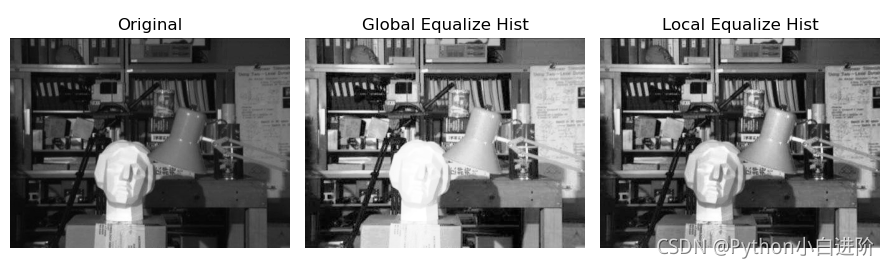
基本例程:1.61 自适应的局部直方图均衡
# 1.61 局部直方图均衡化img = cv2.imread("../images/FigClahe.jpg", flags=0) # flags=0 读取为灰度图像imgEqu = cv2.equalizeHist(img) # 全局直方图均衡化clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(4,4)) # 创建 CLAHE 对象imgLocalEqu = clahe.apply(img) # 自适应的局部直方图均衡化plt.figure(figsize=(9, 6))plt.subplot(131), plt.title('Original'), plt.axis('off')plt.imshow(img, cmap='gray', vmin=0, vmax=255)plt.subplot(132), plt.title(f'Global Equalize Hist'), plt.axis('off')plt.imshow(imgEqu, cmap='gray', vmin=0, vmax=255)plt.subplot(133), plt.title(f'Local Equalize Hist'), plt.axis('off')plt.imshow(imgLocalEqu, cmap='gray', vmin=0, vmax=255)plt.tight_layout()plt.show()
(本节完)
版权声明:
youcans@xupt 原创作品,转载必须标注原文链接:(https://blog.csdn.net/youcans/article/details/125112487)
Copyright 2022 youcans, XUPT
Crated:2021-11-18
这篇关于【OpenCV 例程300篇】49. 直方图处理之局部直方图处理(cv2.createCLAHE)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



