本文主要是介绍三维激光形貌测量软件,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、PointCloud View 简介
PointCloud View (形貌测量软件)是一款激光三维形貌测量点云可视化软件,该软件具备以下功能:
1、数据读取 。常见数据文件(如 ply, pcd 和 obj)的读取、保存、删除清空及可视化显示。
2、数据图形的基本操作,包括设置图像颜色,设置视图窗口背景颜色,设置点云数据的可视化尺寸,设置坐标系的显示。
3、数据图形的处理,包括数据滤波,点云数据的采样,点云数据的压缩和法线的显示。
4、数据图形的重建,包括表面重建和曲面重构。
5、软件界面基本功能。软件主要由: 菜单栏、工具栏、 项目窗口、 属性窗口、输出窗口、 颜色窗口、滤波窗口和显示界面组成。其中大部分都是停靠窗口,可以在菜单栏的视图选项设置是否显示,方便用户自定义软件界面。为了方便大家操作,本文中的示例都是在 Windows 下操作的。

二、PointCloud View 使用说明
1. 数据文件的基本操作
1.1 打开点云数据
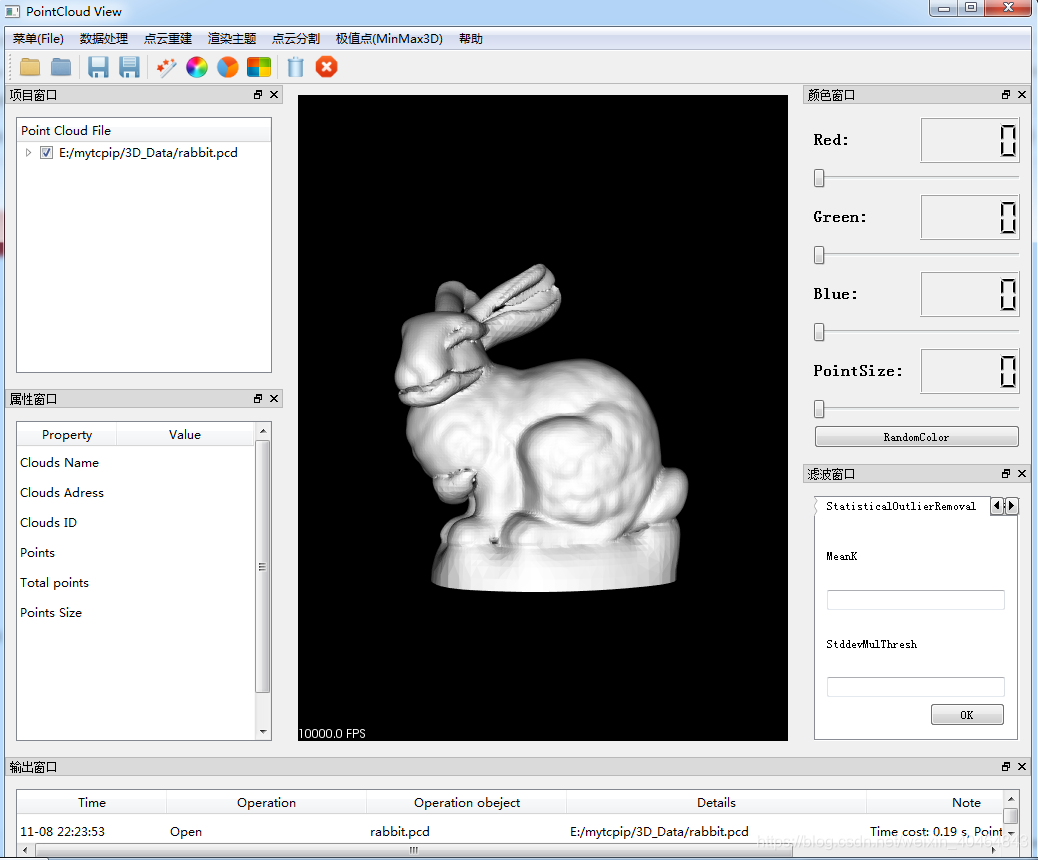
点击菜单按钮下的打开按钮(Open),选择需要处理的数据文件,如下图所示:
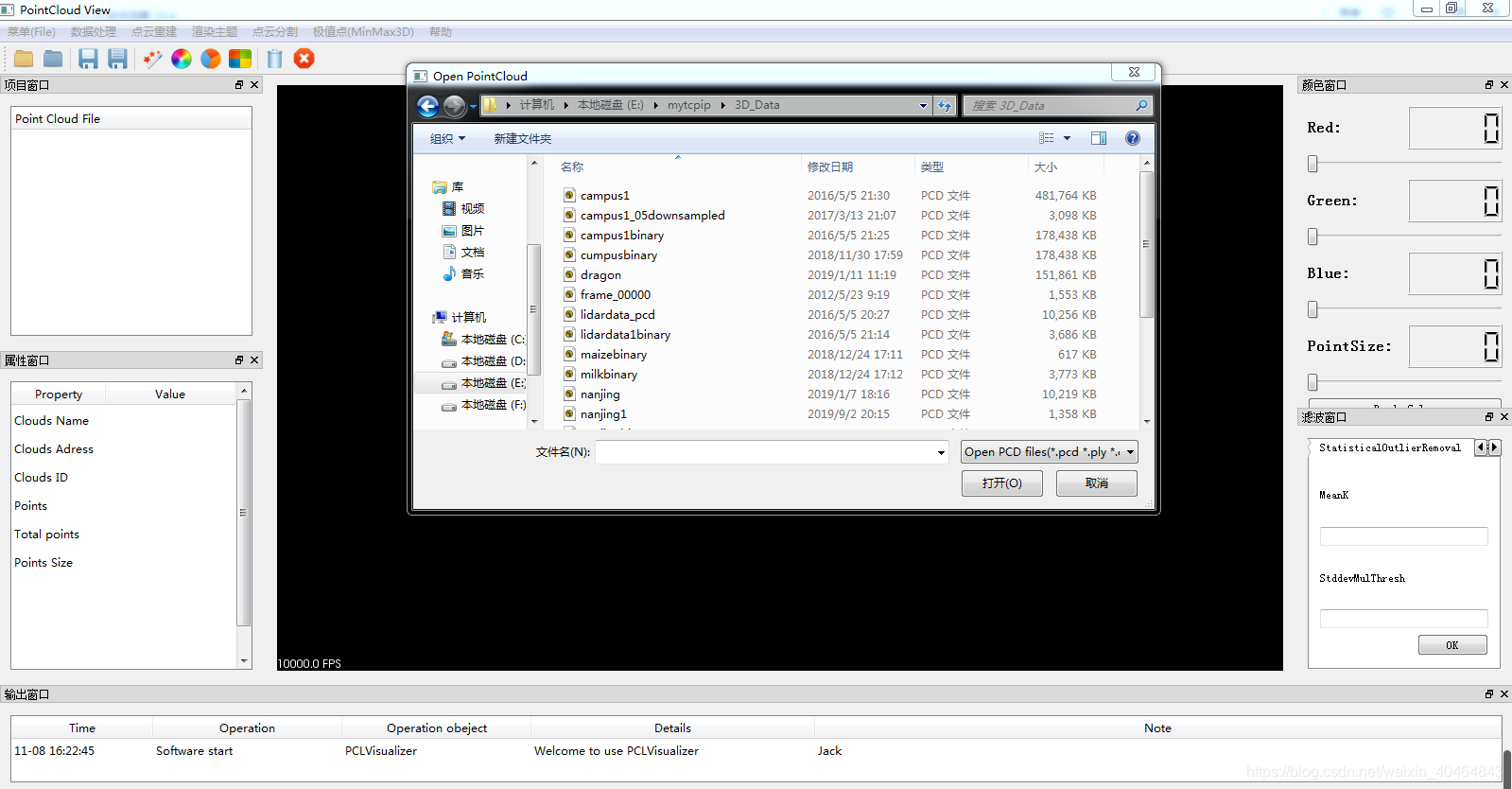
点云数据是由很多个具有三维坐标 x, y, z 的点组成的数据格式,除了位置信息外,点云还可以包含颜色信息(点云的 RGB 值)、透明信息、法线信息等。目前常用的点云格式有 pcd, ply 以及 obj 格式。打开这三种格式的点云主要通过 Qt 库的文件对话框和 PCL 库中载入点云数据的函数实现。有的时候点云数据保存为txt格式,为了方便大家操作,可以直接点击“打开文本”按钮,可以直接读取txt格式的数据。
1.2 保存点云数据
保存点云 Save 有两个特点:
Open 可以实现对 pcd, ply 和 obj 等格式文件的多类型打开,Save 也可以将文件保存成 pcd, ply 等多种类型,这样也就实现了点云的格式转换功能:
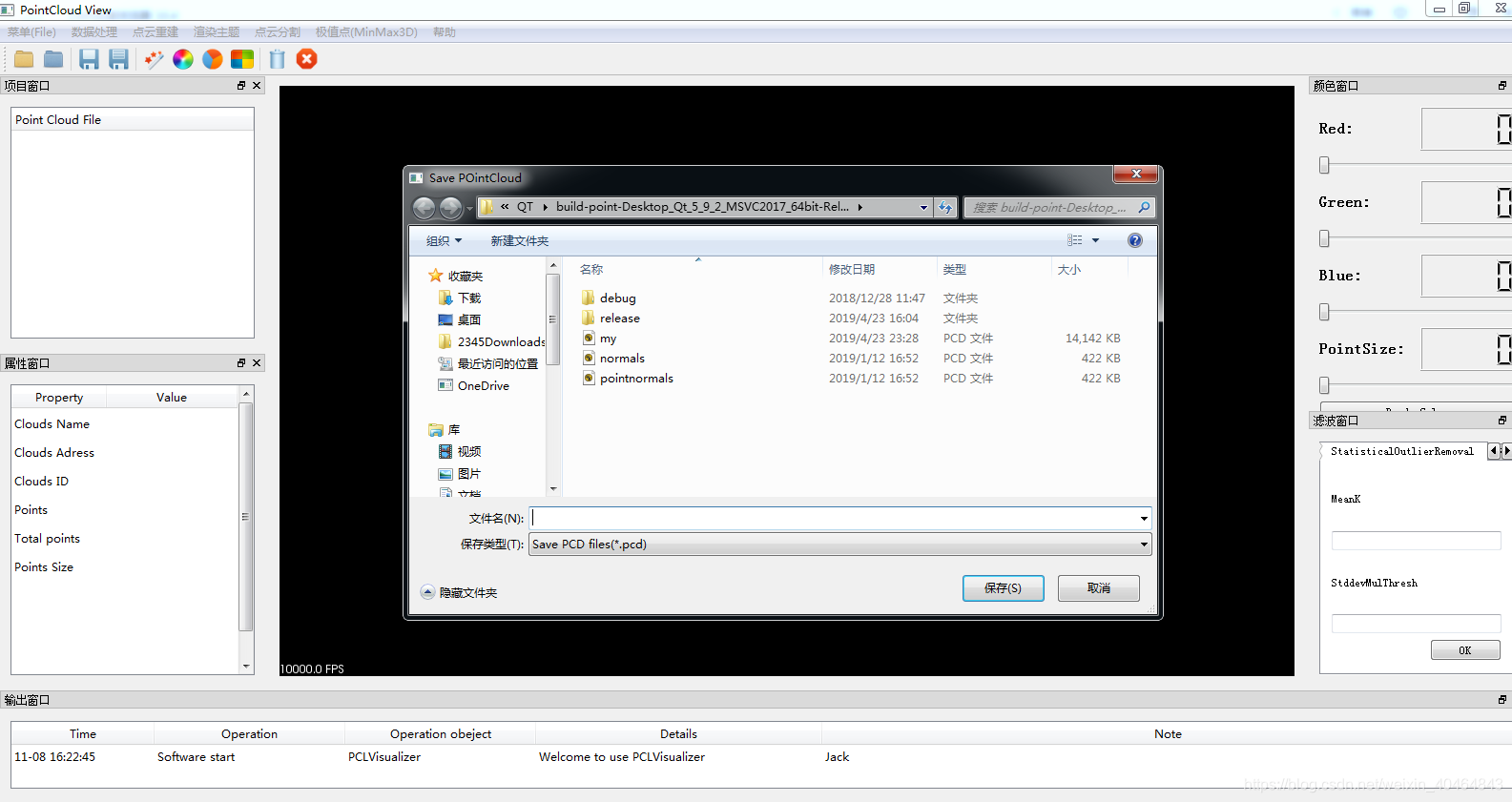
有时候点云数据量非常大,数据读取非常慢,效率低下,所以我们可以把数据文件保存成二进制的形式,这样数据会缩小很多倍,数据读取速度大大提高,点击“保存二进制点云”按钮可以把数据文件保存为二进制的形式。
1.3 清空点云数据和刷新显示界面
清除点云 (Clear) 可将视图窗口中的所有点云模型及后台缓存数据清空。
刷新显示点云(Updata)可以刷新显示的点云,重新显示。
1.4 软件退出
退出(Quit)按钮,退出软件界面。
2. 点云数据的数据处理操作
激光雷达采集的点云数据要进行滤波、配准、采样等操作,然后得到比较准确的三维形貌。
2.1 数据的滤波操作
滤波是为了滤除点云数据中的噪声点和杂波点,使数据更准确,主要包括体素格滤波,直通滤波,统计滤波,半径滤波,条件滤波和双边滤波。
体素格滤波主要是用于数据简化,直通滤波用于滤除大范围杂波,统计滤波用于去除噪声点。
图为点云数据的体素格滤波的结果。
3、点云数据重建
点击点云重建菜单下的泊松曲面重建按钮即可完成数据的曲面重建,去下图所示:
4、数据的颜色渲染和界面主题
点云中的点不但具有三维信息(x, y, z 坐标),还具有颜色信息(R, G, B),为了更形象地描述点云模型,抑或是为了区分不同点云模型,出于这样的目的,我们需要对点云模型的颜色进行修改。具体包括的功能为:
1、调整RGB值改变单一点云文件颜色:
通过颜色对话框来选择具体颜色
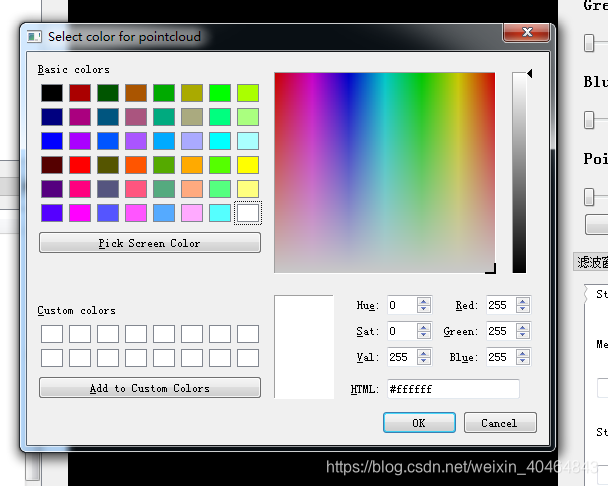
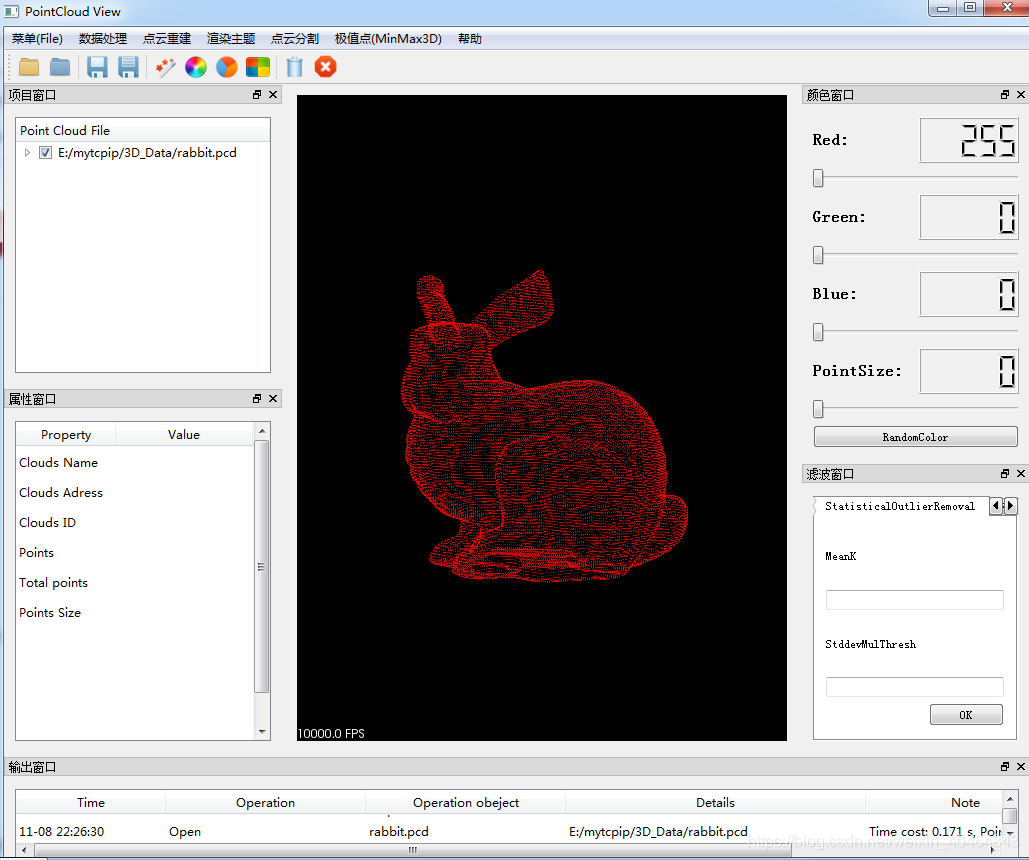
也可以通过调节界面右方颜色窗口的滑块控件设置RGB:

右边滑动窗口255、255、0表示颜色为黄色。
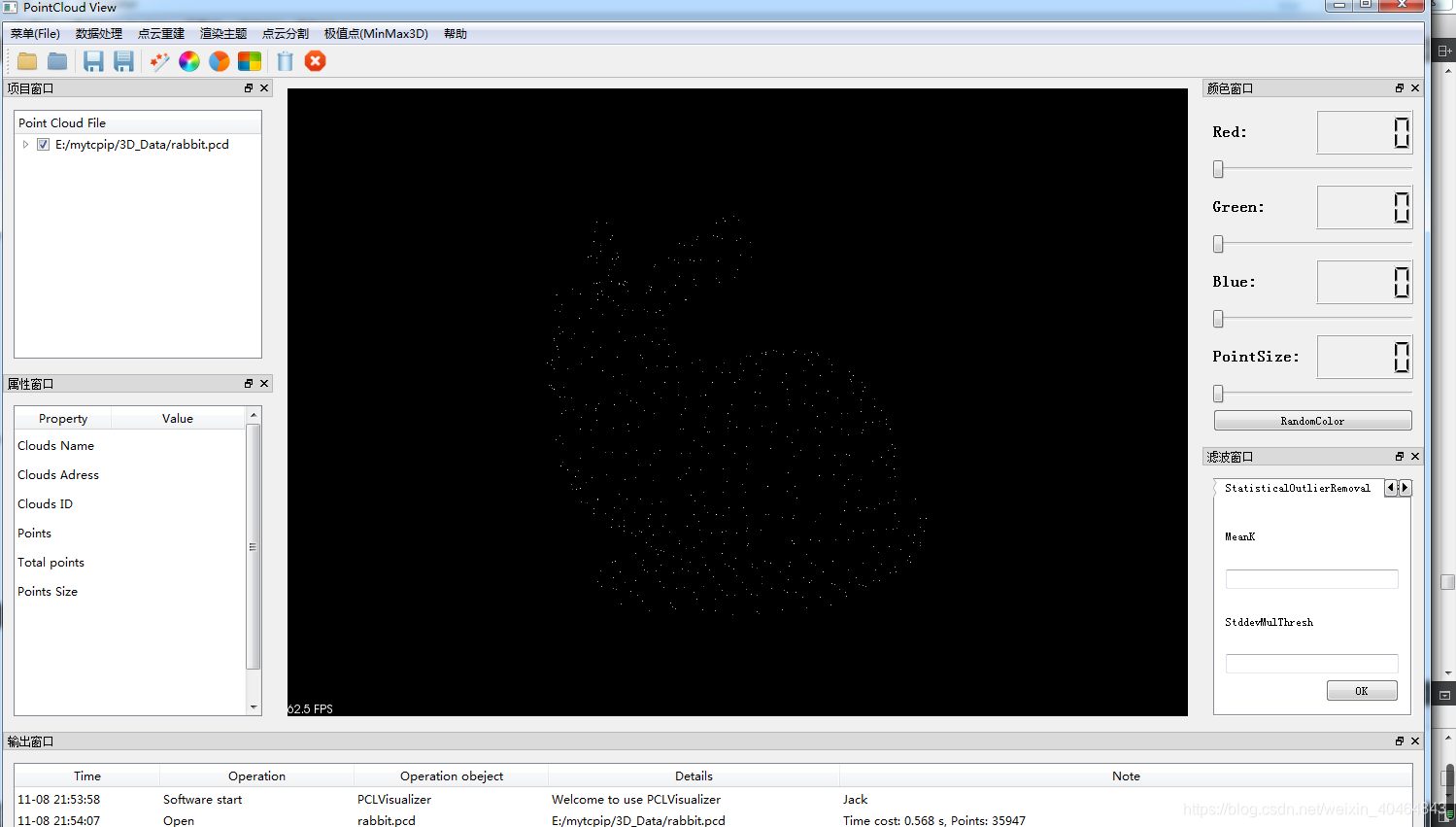
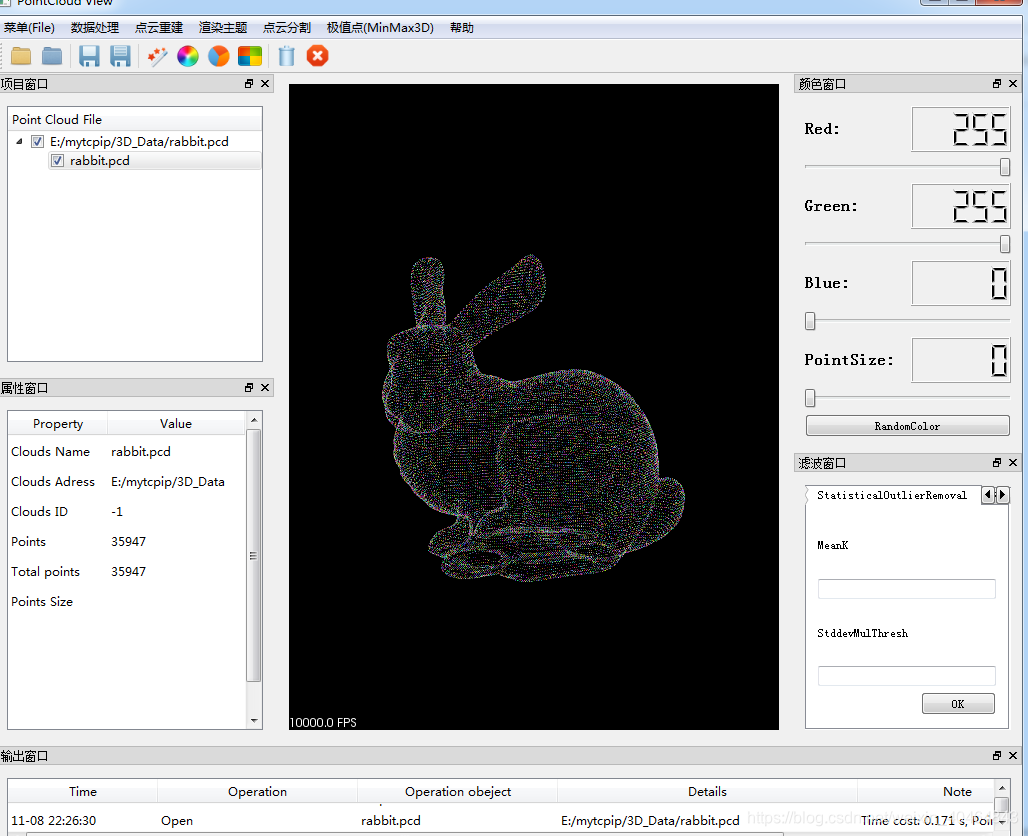
2、点击渲染主题菜单下的点云随机色按钮或者颜色窗口的RandomColor按钮即可对点云数据进行随机上色:
3、给点云数据添加渐变色

4、设置显示界面的颜色和背景:

5、 设置点云可视化尺寸
点云数据由很多点构成,每个点本身具有颜色信息,但是没有尺寸大小的信息。但需要以不同大小进行显示,这是可视化的任务,不涉及对点云本身的修改。设置点云可视化尺寸功能效果如下,为size = 3时点云的大小,为了不影响点云操作,允许的最大尺寸为10(因为点的尺寸越大,渲染速度越慢,对点云的操作也不方便)。

5.5 关于
通过帮助(Help) 可以访问我的博客,查看 PointCloud View的使用手册(后续会出开发手册)。About 界面记录了 PointCloud View 的版本信息和开发者信息。
写的很匆忙,也很混乱,以后有时间在修改,见谅!
这篇关于三维激光形貌测量软件的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!