本文主要是介绍八款主流中型豪华SUV越野性能小结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
第一篇SUV参数篇
下面我们先介绍SUV的主要越野参数:接近角,离去角,通过角。
接近角是指汽车满载时,前保险杠最下端突出点和前轮地面接触起点的夹角。详情见图

接近角越大,汽车在上下坡或进行越野行驶时,就越不容易发生“磕下巴”,如果你介意把车头当铲土机用的话,注意下你的接近角。
-----------------------------------------------------------------------------------------------
离去角是指汽车满载止时后保险杠下端突出点(包括尾喉等排气部分组件后端的最低点)和后轮地面接触末点的夹角。详情见图

离去角主要是车辆在下坡后防止车体后部分磕到坡体的参数。离去角越大,车辆就可以由越陡的坡道上下来,而不用担心后保险杠卡住动弹不得。
------------------------------------------------------
通过角是汽车通过障碍物的能力。有纵向通过角和横向通过半径两个参数,城市SUV一般的越野参数指的是纵向通过角,详情请见图

简单说就是汽车可无碰撞地通过小丘、拱桥等凸起障碍物的轮廓尺寸。因为通过角是比较专业的越野参数,所以大部分城市SUV并没有把这个参数列为测试数据,要实际测量也有一定难度,所以这里没有实测,城市SUV主要以接近角和离去角为越野参数,提醒大家一下,除了这两个参数以外,过长的轴距会造成通过角变小,也就是容易托底,但长轴距会带来行驶稳定性的优势,因此要主要看各位选车时的取向了。
-----------------------------------------------------------------------
选手登场,这次除了之前测过的8款中级SUV,小弟还拉了几款时下比较常见的SUV过来凑热闹,工作量非常大的~
| 测试车型 | 最小离地间距 | 接近角 | 离去角 | 轴距 | 底盘通过性总结 |
| 奥迪Q5 2.0TFSI | 185mm | 25 ° | 17度° | 2807mm | 离去角较小,小心下坡路 |
| 英菲尼迪FX35 | 190mm | 约16.5° | 约21° | 2800mm | 对付一般的台阶绰绰有余,不能苛求FX的越野性 |
| 宝马X3 Dirve28i | 212mm | 25.7 ° | 22.5° | 2810mm | 有一定通过性能,长轴距造成通过角会比较小 |
| 奔驰GLK300 | 187mm | 23 ° | 25 ° | 2755mm | 有G的血统,通过性各项参数表现均衡 |
| 凯迪拉克SRX | 203mm | 11.29° | 20.51° | 2807mm | 悲催的接近角跟轿车无异,很容易变成豪华推土机,枉费高离地间隙 |
| 雷克萨斯RX350 | 185mm | 26.8° | 24.8° | 2740mm | 除非你真不想走寻常路,否则想磕到RX的底是有点难度的 |
| 沃尔沃XC60 T6 | 230mm | 22° | 27° | 2774mm | 离地间隙很高,如果接近角再大点点就更无敌了 |
| 揽胜极光 耀致版 | 212mm | 25° | 33° | 2660mm | 小是小,但他是路虎,一般路面拦不住他 |
|
|
|
|
|
|
|
| 路虎 神行者2 | 210mm | 31° | 34° | 2660mm | 越野好手,不多解释 |
| 雷偌 科雷傲 | 206mm | 27° | 31° | 2690mm | 不错的底盘通过性,给翻山越岭带来信心 |
| 宝马x6 | 210mm | 25° | 25° | 2933mm | 轴距较长小心坡顶刮底 |
| 保时捷 卡宴 | 215mm | 28.7° | 23.5° | 2895mm | 有谁会拿卡宴跑烂路?但如果真要尝试,他绝不会拖泥带水磕磕碰碰 |
| 路虎 揽胜越野版 | 232mm | 29° | 24.2° | 2880mm | 不错的烂路王,但不是野外王,请分清楚 |
| 奔驰G500 | 235mm | 36° | 27° | 2850mm | 放心撒野去吧! |
| 三菱 欧蓝德 | 215mm | 22° | 21° | 2670mm | 不错的离地间隙,可惜接近、离去角度有点小,上下坡要注意 |
| 大众 途观 | 195mm | 28° | 25° | 2684mm | 通过性能不错的城市SUV |
| 现代ix35 | 170mm | 28° | 26° | 2640mm | 离地间隙较小,小心坡顶刮底 |
=======================================================================
第二篇 SUV结构之:四驱形式
接近角和离去角总结完毕,还有一项SUV比较重要的指标,就是四驱形式和差速器形式,大家常说的全时四驱,分时四驱是什么东东?奥迪的Quattro当家主角托森差速器是神马物件?请看下文。
目前SUV的四驱形式主要有3种:
分时四驱
全时四驱
适时四驱
分时四驱
分时四驱是一种可以在两驱和四驱之间手动选择的四轮驱动系统,车子正常行使状况下,采用的是两轮驱动,要通过恶劣路面时,可以通过某些操纵杆或是按钮把两轮驱动切换成四轮驱动,让四个车轮都提供驱动力,
优点:结构简单,稳定性高,坚固耐用
缺点:四驱切换必须手动操作,分时四驱无法在高速行驶时提供四驱帮助,而且拐弯会造成麻烦
说白了,就是纯为越野而生的四驱系统。主要是硬派越野车使用:如路虎卫士,吉普切偌基等等
------------------------------------------------------------
全时四驱
全时全轮驱动AWD。具体的含义是:汽车在行驶的任何时间,所有轮子均独立运动。通俗讲说,就是正常条件下四个车轮都有驱动力。
优点:全时四驱拥有持续平稳的牵引力,比两驱车有更优秀可控性和安全稳定性,同时自动化程度较高的全时四驱车型有条件时刻保持优良的越野通过性。
缺点:由于四个轮胎始终都有传输动力,油耗会偏高。
当下主流的豪华SUV标准配备
---------------------------------------------------------------------
适时四驱
适时四驱这种驱动方式大部分情况下是两轮驱动,只有在适当的时候才会切换为四轮驱动。有一部分这样的车型在内部设计了单独的按钮,印有“LOCK”字样,就是人工锁住4驱的功能,有些车则是自动感应式的四驱状态,车里没有按钮。
优点:结构简单,体积小,重量轻,传动系统噪音小,适合排量较小的SUV
缺点:大部分适时四驱没办法将50%以上动力传动到后轮,越野能力比较有限。
主要用在比不强调越野通过性的SUV上,如现代途胜,本田CRV等
========================================================================================
第二篇 SUV结构之:差速器形式
以上三种驱动形式介绍完,接下就该介绍SUV的核心:差速器了。
虽然差速器这种东西不是每个人都要懂,但作为SUV车主,稍稍普及下这方面的知识还是颇有裨益的。
中央差速器
我们都知道, 车辆在行使过程中不光直线行使,还有弯道。车辆转弯时,前轮转弯半径 比同侧的后轮要大,因此前轮的转速要比后轮快,如果车轮只能以一个转速转动,那车辆根本无法转弯。这时就需要差速器 来实现差速,将 发动机 输出的固定转速分解成不同的转速传递到车轮。一般两驱车只有一个差速器 ,安装在前或者后轴中间,四驱车则需要中央 差速器 来分配前后轴扭矩中央差速器的主要种类有:
开放式中央差速器
多片离合器式差速器
托森差速器
粘性联轴节式差速器
开放式中央差速器
开放式差速器就是没有任何限制,是区别四轮不同转速,保证车辆正常行驶必备的差速器。但假如一辆四驱车只配备开放式差速器,那么如果其中一个轮子打滑,那么这个车的全部动力都会浪费在这个车轮上,而其余三个车轮则无法得到足够的动力。
优点:没有特别的优点,因为差速器是汽车正常行驶的必备条件;
缺点:在越野车领域,开放式差速器会影响越野路面的脱困性。
多片离合器式差速器
当前后轴的转速超过一定范围,例如前轮开始打滑,电控系统会控制液压机构将多片离合器压紧,此时扭矩传递到离合器片,再由离合器片传递到后轴,从而实现四驱。
优点:反应速度很快,可瞬间结合调整扭矩;多数车型都是电控结合,无需手动控制;
缺点:高负荷工作时容易过热。
-------------------------------------------------------------------------
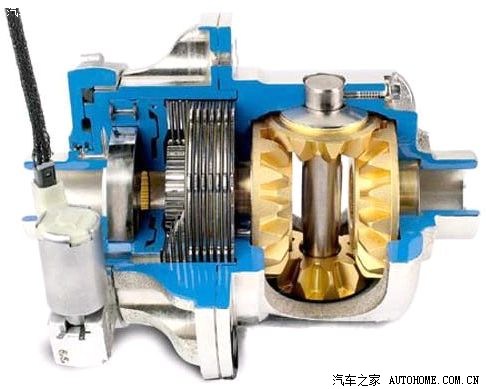
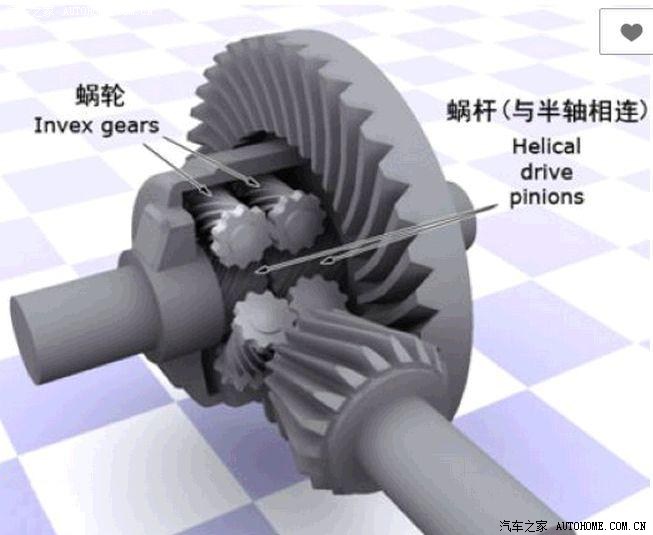
托森差速器
大名鼎鼎的托森差速器是由蜗轮、蜗杆齿轮咬合来传动前后扭矩的,就是一套机械自锁装置,当主传动轴空转时,机械自锁装置就将扭矩通过涡轮蜗杆传动到后轴,实现四驱。
简单地说,托森差速器就是一个全自动纯机械差速器,即不需要人为控制+100%可靠的机械传动的限滑差速器,从某个角度来说是一种很均衡的设计。
优点: 能够在瞬间对驱动轮之间出现的阻力差提供反馈,分配扭矩输出,而且锁止特性是线性的,能够在一个相对宽泛的扭矩输出范围内进行调节;
缺点:没有两驱状态;差速器限滑能力有限,动力无法完全传递到某一个车轮。
-------------------------------------------------------------------------------------
粘性联轴节式差速器
粘性联轴节式差速器,这种结构的差速器是当今全轮驱动汽车上自动分配动力的灵巧的装置。它通常安装在以前轮驱动为基础的全轮驱动汽车上。这种汽车平时按前轮驱动方式行驶。粘性联轴节的最大特点就是不需驾驶员操纵,就可根据需要自动把动力分配给后驱动桥。
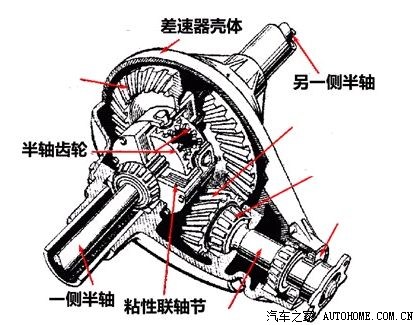
在正常行驶时,前后车轮没有转速差,粘性联轴节不起作用,动力不分配给后轮,汽车仍然相当于一辆前轮驱动汽车,但遇到恶劣路况时,前轮出现打滑,前后车轮出现转速差,内板内的硅油受到搅动受热膨胀,就会产生极大的粘性阻力,向后轴传递扭矩,这样就形成了四驱。
优点:尺寸紧凑、结构简单、生产成本低;
缺点:缺点是反应速度慢,扭矩分配比例小,结合和分离不可手动控制,高负荷工作时因为过热可能会失效。
----------------------------------------------------------------------
好了在普及了这些知识之后,相信对大家看下面的表格会有一定的帮助
| 测试车型 | 差速器形式 | 四驱形式 | 越野辅助功能 | 越野性能小结 |
| 奥迪Q5 2.0TFSI | 托森式 | 全时四驱 | 陡坡缓降 | 虽然用了可靠皮实的托森式差速器,但电子轮间限滑装置制动力有限,无法完全制动一个车轮,所以他的脱困能力还是有限,严格一点说,刚刚及格 |
| 英菲尼迪FX35 | 多片离合器式 | 全时四驱 | —— | 没有电子轮间限滑,仅有最基本的越野能力,遇到烂路请绕道 |
| 宝马X3 Dirve28i | 多片离合器式 | 全时四驱 | 陡坡缓降 | 扭矩可在前后轴之间0~100%的分配,电子轮间限滑介入迅速,越野性略强于同级 |
| 奔驰GLK300 | 多片离合器式 | 全时四驱 | —— | 缩小版G,有一定的通过性,30%斜坡,几个坑,两三百毫米的水深不是问题 |
| 凯迪拉克SRX豪华 | 多片离合器式 | 全时四驱 | —— | 这个四驱系统还是有一定的越野能力的,但因为超低接近角,所以不建议用他越野 |
| 雷克萨斯RX350 | 多片离合器式 | 全时四驱 | —— | 四轮没有电子轮间限滑,遇到被困时难以脱困,遇到烂路躲为上策 |
| 沃尔沃XC60 T6 | 多片离合器式 | 全时四驱 | 陡坡缓降 | 电子轮间限滑应速度比较快,不能重负荷长时间运作,偶尔脱困可以 |
| 揽胜极光 耀致版 | 多片离合器式 | 全时四驱 | 全地形反馈,陡坡缓降 | 一般的沙地,交叉桥等等普通的越野项目难不倒极光,虽然他动感,但他也是路虎 |
| 路虎 神行者2 | 多片离合器式 | 全时四驱 | 全地形反馈,陡坡缓降 | 越野性远超同级,完全对得起路虎的名号,最大涉水500mm更是直指大型越野SUV |
| 雷诺 科雷傲 | 多片离合器式 | 适时四驱 | 陡坡缓降 | 只有标准100:0和50:50两种模式,四驱不能大负荷长时间工作,简单被困可以应付 |
| 宝马x6 | 多片离合器式 | 全时四驱 | 陡坡缓降 | X6比起X系其他车型多了一套动态驱动力分配,可对车辆后轮进行独立动力分配 |
| 保时捷 卡宴 | 多片离合器式 | 全时四驱 | 多模式选择,陡坡缓降 底盘升降系统 | 标准的前60% 后 40% 扭力输出,高配版可以分配前后轴扭力,可以选装中央差速器锁以及后桥差速器锁,武装后越野功能强大 |
| 路虎 揽胜越野版 | 托森式 | 全时四驱 | 全地形反馈系统 陡坡缓降,底盘升降系统 | 超级强大的电子系统和超长行程的悬挂系统,足够秒杀炮弹坑,交叉轴,爬坡,下坡,砂石路等越野测试项目, |
| 奔驰G500 | 纯机械式差速锁 | 全时四驱 | 前、中、后三把差速锁 | 非承载式车身,专业级电子辅助,除了军用级别以外最强的水平了! |
| 三菱 欧蓝德 | 多片离合器式 | 适时四驱 | —— | 带2WD的三种四驱模式分配前后轴扭矩:标准:10:90;雪地:70:30; 四驱锁定:50:50;没有轮间电子辅助制动能力,只算最基本的四驱车。 |
| 大众 途观 | 多片离合器式 | 全时四驱 | —— | 电子轮间限滑辅助功能不够强大,无法完全制动一个车轮,但有一点点的越野性 |
| 现代ix35 | 多片离合器式 | 适时四驱 | —— | 前后桥只能按100:0或50:50的扭力进行分配,最简单的四驱形式 |
这篇关于八款主流中型豪华SUV越野性能小结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



