本文主要是介绍P2973 [USACO10HOL] Driving Out the Piggies G 臭气弹/驱逐猪猡,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
题目链接
题目:
奶牛们建立了一个随机化的臭气炸弹来驱逐猪猡。猪猡的文明包含1到N (2 <= N <= 300)一共N个猪城。这些城市由M (1 <= M <= 44,850)条由两个不同端点A_j和B_j (1 <= A_j<= N; 1 <= B_j <= N)表示的双向道路连接。保证城市1至少连接一个其它的城市。
一开始臭气弹会被放在城市1。每个小时(包括第一个小时),它有P/Q (1 <= P <=1,000,000; 1 <= Q <= 1,000,000)的概率污染它所在的城市。如果这个小时内它没有污染它所在的城市,那麽它随机地选择一条道路,在这个小时内沿着这条道路走到一个新的城市。可以离开这个城市的所有道路被选择的概率均等。
因为这个臭气弹的随机的性质,奶牛们很困惑哪个城市最有可能被污染。给定一个猪猡文明的地图和臭气弹在每个小时内爆炸的概率。计算每个城市最终被污染的概率。
如下例,假设这个猪猡文明有两个连接在一起的城市。臭气炸弹从城市1出发,每到一个城市,它都有1/2的概率爆炸
1--2
可知下面这些路径是炸弹可能经过的路径(最后一个城市是臭气弹爆炸的城市):
1: 1
2: 1-2
3: 1-2-1
4: 1-2-1-2
5: 1-2-1-2-1
...
要得到炸弹在城市1终止的概率,我们可以把上面的第1,第3,第5……条路径的概率加起来,(也就是上表奇数编号的路径)。上表中第k条路径的概率正好是,也就是必须在前k-1个回合离开所在城市(每次的概率为1 - 1/2 = 1/2)并且留在最后一个城市(概率为1/2)。
所以在城市1结束的概率可以表示为1/2 + (1/2)^3 + (1/2)^5 + …。当我们无限地计算把这些项一个个加起来,我们最后会恰好得到2/3,也就是我们要求的概率,大约是0.666666667。这意味着最终停留在城市2的概率为1/3,大约为0.333333333。
你将会在你前50次提交的时候得到部份测试数据反馈。
题目名称: dotp
输入格式:
第1行: 四个由空格隔开的整数: N, M, P, 和 Q
第2到第M+1行: 第i+1行用两个由空格隔开的整数A_j和B_j表示一条道路。
输出格式:
第1到第N行: 在第i行,用一个浮点数输出城市i被摧毁的概率。误差不超过10^-6的答案会被接受(注意这就是说你需要至少输出6位有效数字使得答案有效)。
样例输入:
2 1 1 21 2
样例输出:
0.666666667
0.333333333
私货:初音未来:没活了给大家唱首歌吧
题意概括:
给出一个n个点、m条边的无向图,在节点1有一枚炸弹。炸弹在每个节点都有 p q {p\over q} qp的概率爆炸,1- p q {p\over q} qp的概率转入其他节点,要求输出每个点的爆炸概率。
思路分析
一个无向图,联系高斯消元的矩阵,很容易想到邻接链表。
通过邻接链表我们就将一个图转换成了一个矩阵。
而对于每一个点,都有 p q {p\over q} qp的概率爆炸。
而除了炸弹所在初始点为点1外,所有的炸弹都是转入来的
我们设第i个点的转入概率是 x i x_i xi
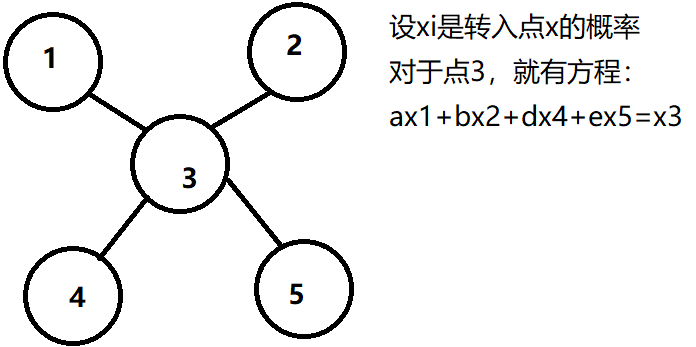
对图的解释:以 x 1 x_1 x1为例子, x 1 x_1 x1是点1的转入概率,而它的系数a就是 x 1 x_1 x1转入 x 3 x_3 x3的概率,a=(1- p q {p\over q} qp)* 1 d 1 {1\over d_1} d11( d 1 d_1 d1是点1的入度)
而此方程可以将x3左移过去就有了矩阵:
a b -1 d e | 0
同理但特殊的,对于点1,最初炸弹就在这里,我们在等式左边加1,可以移动到等式右边去
得到矩阵:
-1 0 c 0 0 | -1
(因为节点1只和3相连所以 x 2 x_2 x2、 x 4 x_4 x4、 x 5 x_5 x5的系数都是0)
我们得到了矩阵,就可以运用高斯消元得到未知数 x i x_i xi的值
该值乘上 p q {p\over q} qp就得到了在该点爆炸的概率。
注意:
p/q应是double类型
Miku’s Code:
#include<bits/stdc++.h>
using namespace std;const int maxn=350;
const int eps=1e-8;int n,m,p,q;
double k;
int d[maxn];
double a[maxn][maxn];
bool cont[maxn][maxn];void input(){ //输入scanf("%d%d%d%d",&n,&m,&p,&q);int A,B;for(int i=1;i<=m;++i){scanf("%d%d",&A,&B);cont[A][B]=true;cont[B][A]=true;++d[A];++d[B];}
}void change(){ //转化出矩阵a[1][n+1]=-1;k=(double)p/q;for(int i=1;i<=n;++i){a[i][i]=-1;for(int j=1;j<=n;++j){if(cont[i][j]==true){a[i][j]=(1-k)/d[j];}}}
}void try_(){ //调试代码for(int i=1;i<=n;++i){for(int j=1;j<=n+1;++j){if(j==n+1) cout<<"| ";cout<<a[i][j]<<' ';}cout<<endl;}
}void work(){ //高斯约旦消元板子for(int i=1;i<=n;++i){int y=i;while(fabs(a[y][i])<=fabs(eps)&&y<=n) ++y;for(int j=1;j<=n+1;++j){swap(a[i][j],a[y][j]);}double k=a[i][i];for(int j=1;j<=n+1;++j){a[i][j]/=k;}for(int j=1;j<=n;++j){if(i!=j){double ki=a[j][i];for(int q=1;q<=n+1;++q){a[j][q]-=ki*a[i][q];}}}}
}int main(){input();change();//try_();work();//try_();for(int i=1;i<=n;++i){printf("%.6lf\n",a[i][n+1]*k);}return 0;
}
注:本人不是Miku黑,整活部分如有冒犯请见谅。
QAQ
这篇关于P2973 [USACO10HOL] Driving Out the Piggies G 臭气弹/驱逐猪猡的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!