本文主要是介绍Dijkstra算法不能解决负权边的问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
之前我们说了Dijkstra算法不能解决带有负权边的图,这是为什么呢?下面用一个例子讲解一下
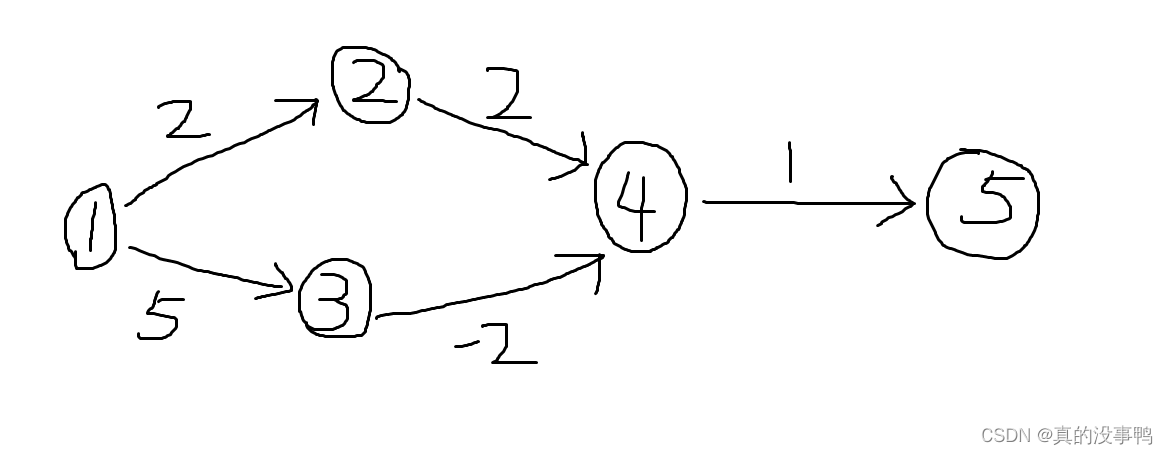
以这里图为例,一共有五个点,也就说要循环5次,确定每个点的最短距离
用dijkstra算法解决的的详细步骤
1,初始dist[1] = 0,1号点距离起点1的距离为0
2,找到了未标识且离起点1最近的结点1,标记1号点,用1号点更新和它相连点的距离,2号点被更新成dist[2] = 2,3号点被更新成dist[3] = 5
3,找到了未标识且离起点1最近的结点2,标识2号点,用2号点更新和它相连点的距离,4号点被更新成dist[4] = 4
4,找到了未标识且离起点1最近的结点4,标识4号点,用4号点更新和它相连点的距离,5号点被更新成dist[5] = 5
5,找到了未标识且离起点1最近的结点3,标识3号点,用3号点更新和它相连点的距离,4号点被更新成dist[4] = 3
结束
得到1号点到5号点的最短距离是5,对应的路径是1 -> 2 -> 4 -> 5,并不是真正的最短距离
结果:
dijkstra算法在图中走出来的最短路径是1 -> 2 -> 4 -> 5,算出 1 号点到
5 号点的最短距离是2 + 2 + 1 = 5,然而还存在一条路径是1 -> 3 -> 4 -> 5,该路径的长度是5 + (-2) + 1 = 4
因此 dijkstra 算法失效
注:我们可以发现如果有负权边的话4号点经过标记后还可以继续更新
但此时4号点已经被标记过了,所以4号点不能被更新了,只能一条路走到黑
当用负权边更新4号点后5号点距离起点的距离我们可以发现可以进一步缩小成4。
所以总结下来就是:dijkstra不能解决负权边是因为 dijkstra要求每个点被确定后,dist[j]就是最短距离了,之后就不能再被更新了(一锤子买卖),而如果有负权边的话,那已经确定的点的dist[j]不一定是最短了,可能还可以通过负权边进行更新。
看了上面那个例子应该就可以理解为什么Dijkstra不能解决带有负权边的问题了。如有错漏之处,敬请指正!
这篇关于Dijkstra算法不能解决负权边的问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




