本文主要是介绍COMSOL超声换能器聚焦声场仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
超声聚焦
超声聚焦广泛应用于各类工业设备与技术中,例如我们熟悉的无损检测(NDT)和医学成像。高强度聚焦超声(HIFU)是此技术的一项临床应用,它利用探头将大部分能量集中到目标组织区域,使组织发生凝固性坏死。本篇博客文章将重点对超声聚焦的仿真过程进行探讨。根据不同的换能器设计,超声波有几种聚焦方式。COMSOL Multiphysics 软件是仿真换能器的有力工具。
换能器发射的信号有两种聚焦方式:
一、曲阵换能器,修改换能器曲率半径使其等于焦距
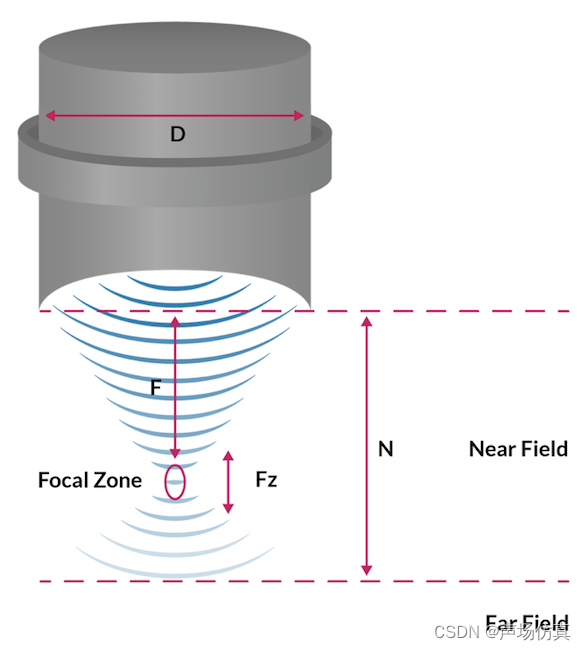
对于超声换能器(上图)几个重要因素包括:
- 近场距离
N,计算公式为: N = D 2 f / 4 c N=D^2f/4c N=D2f/4cD 是换能器直径
f 是频率
c 是介质中的声速 - 焦距 F,即换能器与相当于目标区的聚焦点之间的距离
- 场深或聚焦区,它表示 -6dB 信号的幅度与最高幅度之间的差距,计算公式为: F z = 2 F 2 / ( N + F / 2 ) F_z=2F^2/(N+F/2) Fz=2F2/(N+F/2)
对于此种聚焦方式,可以参考 COMSOL 官网案例
组织体模中的聚焦超声发热
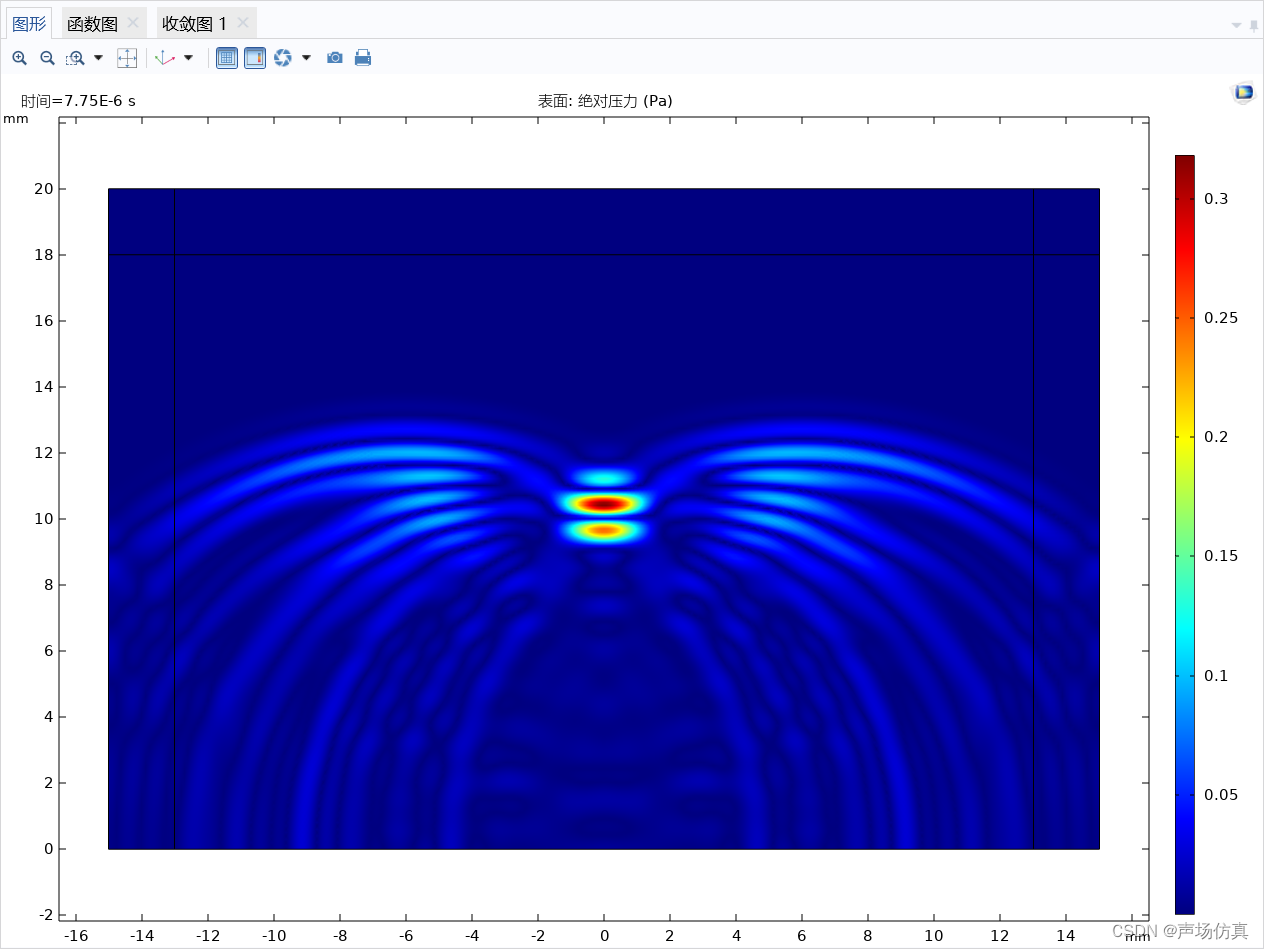
二、线阵换能器,引入相位延迟
相位延迟聚焦探头
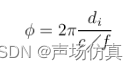
在压电元件阵列中加入若干换能器,利用相位延迟控制每个元件的电压输入。针对线性阵列,一个有效的方法是计算每个单元的中心 i 与焦点之间的距离 di,并将相位应用于方程:
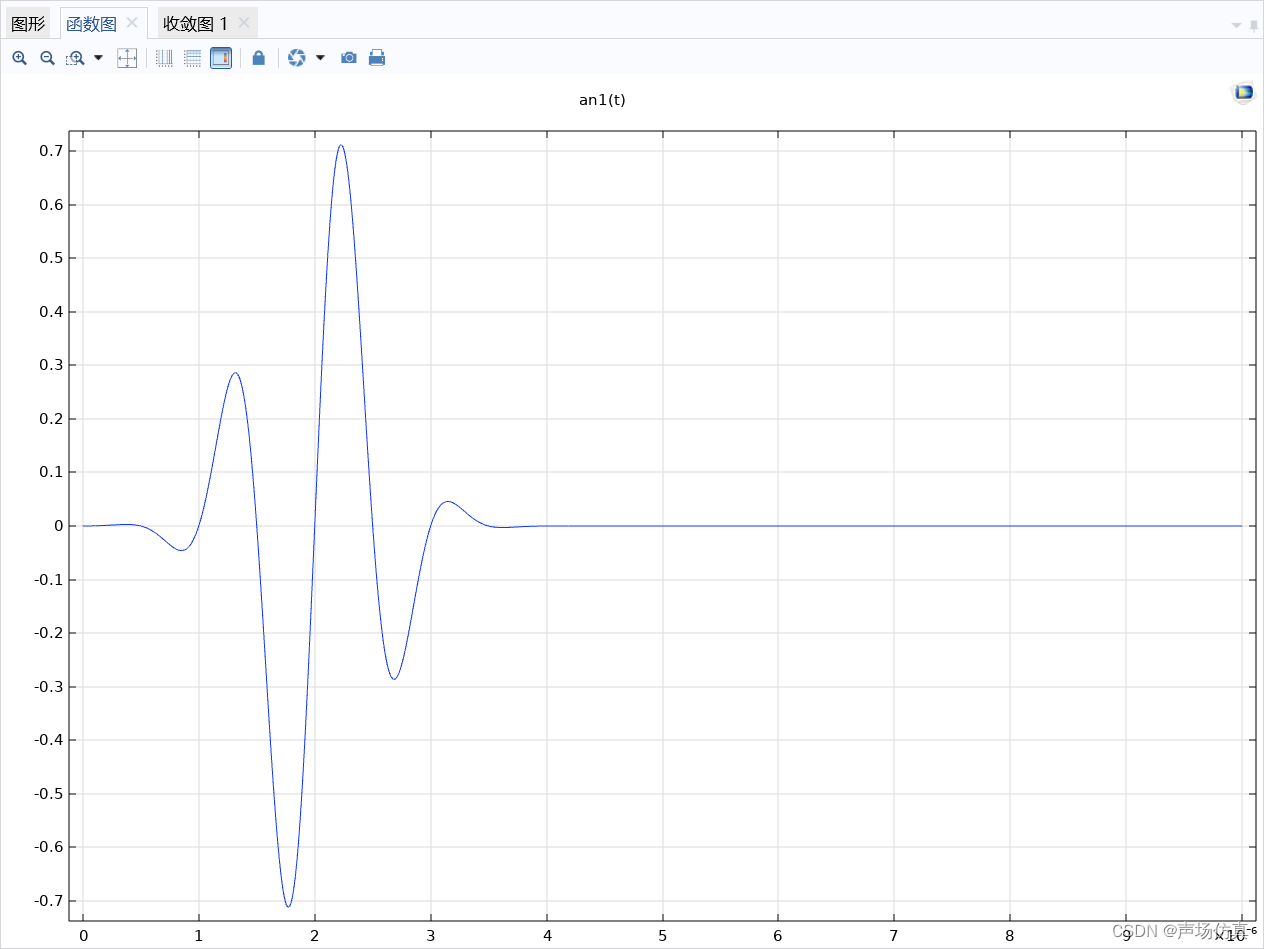
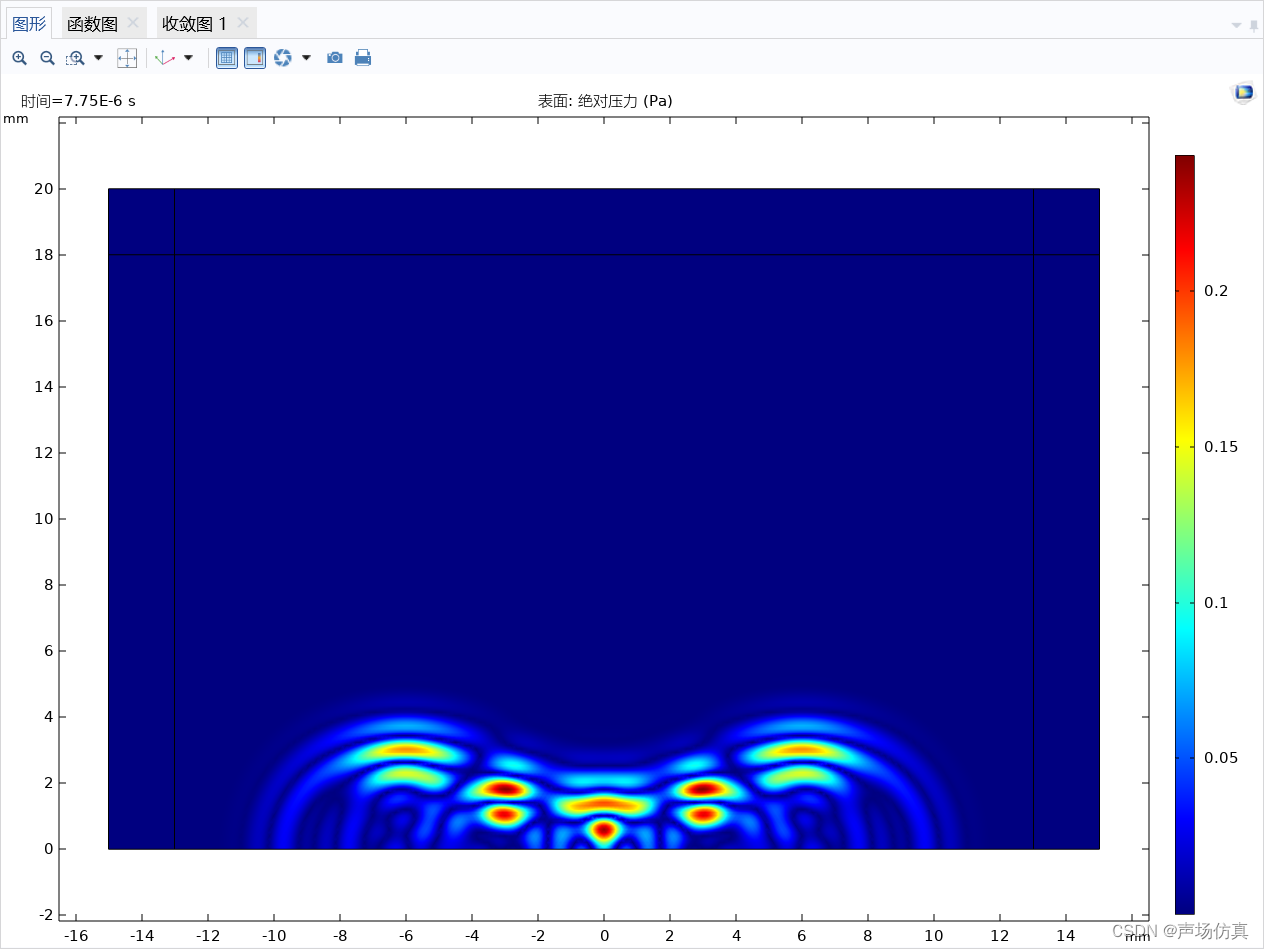
激励波形
设置正弦波×高斯脉冲等到激励波形f(t),作为激励条件。各个换能器阵元的激励波形一致,但存在激励时间差f(t-dt)
时间差
根据聚焦点位置以及各换能器阵元到达聚焦处的时间计算声程差dL
时间差dt=声程差dL÷介质声速c

COMSOL仿真模型请QQ联系:2971319104
这篇关于COMSOL超声换能器聚焦声场仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








