本文主要是介绍ROS机器人应用(3)——程序修改编译与SublimeText 简析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 程序修改编译与SublimeText 简析
- 1.1程序修改编译
- 1.2 SublimeText 简析
程序修改编译与SublimeText 简析
1.1程序修改编译
- 小车开机,连接WIFI,密码:dongguan。
- NFS 挂载 (客户端)
# 把小车“/home/wheeltec/wheeltec_robot” 文件夹下的文件挂载到虚拟机的“/mnt”文件下。
sudo mount -t nfs 192.168.0.100:/home/wheeltec/wheeltec_robot /mnt
# 查看挂载文件
cd /mnt
ls

- 查看服务端被挂载的文件(服务端)
cd /home/wheeltec/wheeltec_robot
ls

如上图所示服务端和客户端的文件相同,说明挂载成功。
- ssh 登录到服务端,输入
date查看系统时间。
并修改服务端系统时间为现在:例如sudo date -s "2022-10-19 21:48:00"(精确到分钟就可以)
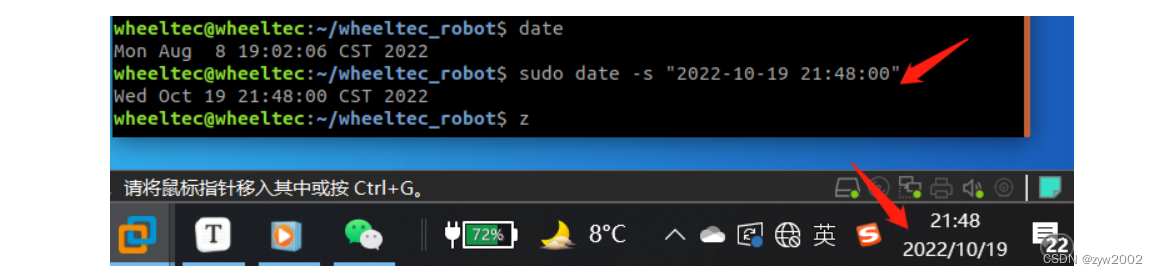
这一步是因为树莓派/Nano/TX2/NX/工控机的系统时间在没有连接互联网时,系统时间可能会混乱。同时我们程序修改是需要编译后才能生效的,而编译规则是只编译最新时间的修改,同时修改时间在未来即大于当前系统时间的不编译。
上一次修改时间>此次修改时间:不编译
此次修改时间>当前系统时间:不编译
- 修改程序
- 编译使程序修改生效(.c、.cpp、.h 文件需要编译,如果修改的
是.py、.launch、.yaml、.urdf 等文件则不需要编译):
cd /home/wheeltec/wheeltec_robot (打开工程所在路径)
catkin_make(编译)
多线程编译:catkin_make -j2 -l2
-j2,j 是job 的意思,代表允许2 个编译命令同时进行,一般是以CPU
的核心数目的两倍为宜
-l2,l 是load-average 的意思,代表系统加载的任务数,数目一般与-j 的数
目保持一致。
指定编译编译单个功能包:
catkin_make -DCATKIN_WHITELIST_PACKAGES="功能包名"
解除指定功能包编译:
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
1.2 SublimeText 简析
-
首先解除挂载
sudo umount -t nfs 192.168.0.100:/home/wheeltec/wheeltec_robot /mnt -
然后断开小车的wifi, 连接一个有网的wifi
-
下载SublimeText
官方下载链接:http://www.sublimetext.cn/3
官方中文文档:http://www.sublimetext.cn/support
选择linux,stable版本 -
重要功能:
中文界面:Tools->Install Package Control,
Preference->Package Control->Package Control: Install Package,搜索
“ChineseLocalizations”,点击,等待安装完成。
切换语言:Help->Language
记住文件格式对应打开方式:右下角->Open all with current extension as...
界面分栏:View->Layout,Alt+Shift+(数字)
全局搜索:Find->Find in Files...,Ctrl+Shift+F
主题风格:Preference->Color Scheme...
Preference->Color Theme
多字符选中同时修改:Ctrl+D
快速跳转函数定义:Ctrl+P,输入:函数所在文件关键词@函数关键词(输入
函数关键词后可以通过方向键选择函数文件)
快速跳转函数/变量定义:将鼠标悬停在符号上,就可以以跳转到其定义的
文件。
自定义按键绑定:Preference->Key Bindings
- 常规快捷键:
Ctrl+Z:撤销修改
Ctrl+Y:恢复修改
Ctrl+F:查找关键字
Ctrl+Shift+K:删除整行
Ctrl+/:注释单行
Ctrl+Shift+/:注释多行
Tab :向右缩进
Shift+Tab:向左缩进
Ctrl+M:光标移动至括号内结束或开始的位置
这篇关于ROS机器人应用(3)——程序修改编译与SublimeText 简析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




