本文主要是介绍【国产MCU移植】HC32F460基于Keil MDK 移植 RT-Thread Nano,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文由RT-Thread论坛用户@想当诸侯的小蚂蚁原创发布:https://club.rt-thread.org/ask/article/2966.html
软件
根据厂家demo重新新建工程,工程中包含了gpio、usart。
硬件:
gpio
/* GREEN_LED Port/Pin definition */
#define GREEN_LED_PORT (PortE)
#define GREEN_LED_PIN (Pin00)
/* RED_LED Port/Pin definition */
#define RED_LED_PORT (PortE)
#define RED_LED_PIN (Pin01)
usart4
/* USART RX Port/Pin definition */
#define USART_RX_PORT (PortC)
#define USART_RX_PIN (Pin07)
#define USART_RX_FUNC (Func_Usart4_Rx)
/* USART TX Port/Pin definition */
#define USART_TX_PORT (PortC)
#define USART_TX_PIN (Pin06)
#define USART_TX_FUNC (Func_Usart4_Tx)
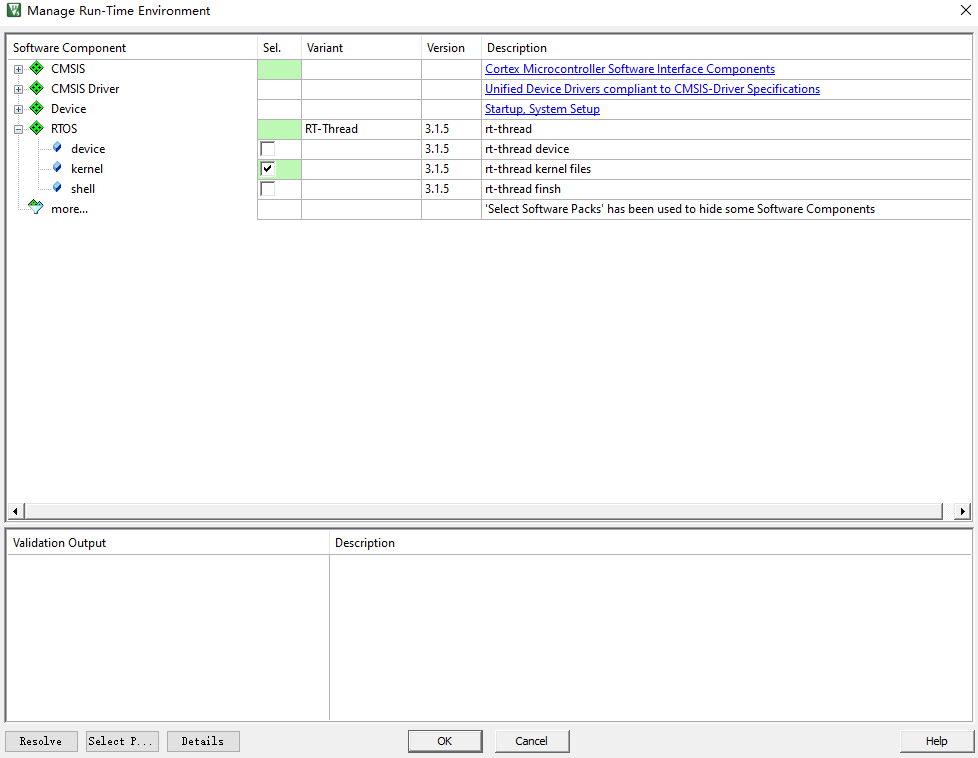
添加 RT-Thread Nano 到工程
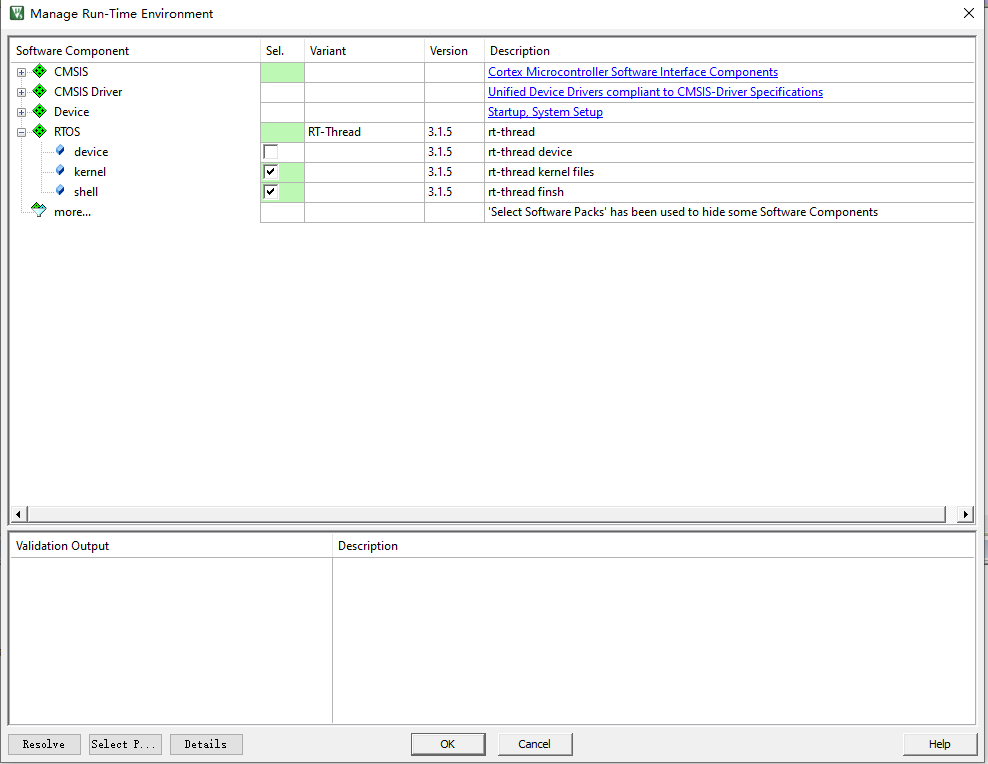
在 Manage Rum-Time Environment 内打开 RTOS 栏,勾选 kernal,点击 OK 后就将 RT-Thread 内核加入到工程中了。
适配 RT-Thread Nano
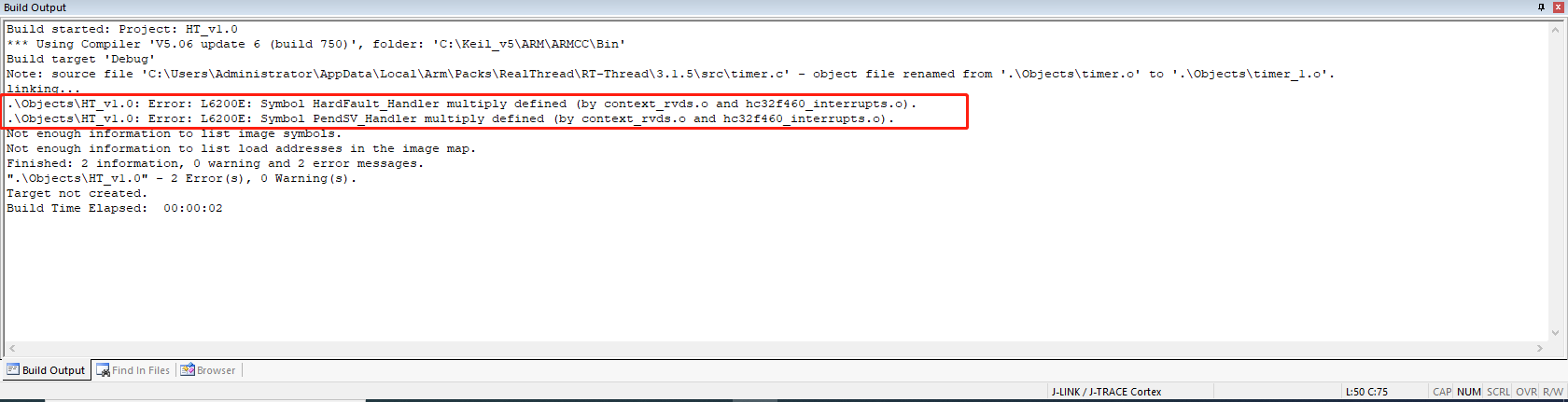
中断与异常处理
需要删除工程里中断服务例程文件 hc32f460_interrupts.c中异常处理函数 HardFault_Handler() 和悬挂处理函数 PendSV_Handler(),这两个函数已由 RT-Thread 实现,避免在编译时产生重复定义。
系统时钟配置
需要在 board.c 中实现 系统时钟配置(为 MCU、外设提供工作时钟)与 os tick 的配置 (为操作系统提供心跳 / 节拍)。
void SysTick_Handler(void)
{rt_os_tick_callback();
}
void rt_hw_board_init(void)函数中调用系统时钟
SysClkConfig(); //系统时钟初始化SysTick_Init(RT_TICK_PER_SECOND); //OS Tick 频率配置void SysClkConfig(void)所在文件system_hc32f460.c
void SysClkConfig(void)
{stc_clk_sysclk_cfg_t stcSysClkCfg; //系统时钟stc_clk_xtal_cfg_t stcXtalCfg; //晶振配置stc_clk_mpll_cfg_t stcMpllCfg; //PLLstc_sram_config_t stcSramConfig;MEM_ZERO_STRUCT(stcSysClkCfg);MEM_ZERO_STRUCT(stcXtalCfg);MEM_ZERO_STRUCT(stcMpllCfg);/* Set bus clk div. 分频 */stcSysClkCfg.enHclkDiv = ClkSysclkDiv1; // 100MHz stcSysClkCfg.enExclkDiv = ClkSysclkDiv2; // 50MHzstcSysClkCfg.enPclk0Div = ClkSysclkDiv1; // 100MHzstcSysClkCfg.enPclk1Div = ClkSysclkDiv2; // 50MHzstcSysClkCfg.enPclk2Div = ClkSysclkDiv4; // 25MHzstcSysClkCfg.enPclk3Div = ClkSysclkDiv4; // 25MHzstcSysClkCfg.enPclk4Div = ClkSysclkDiv2; // 50MHzCLK_SysClkConfig(&stcSysClkCfg);//时钟分频/* Switch system clock source to MPLL. *//* Use Xtal as MPLL source. */stcXtalCfg.enMode = ClkXtalModeOsc;//XTAL模式选择位 stcXtalCfg.enDrv = ClkXtalLowDrv;/*XTAL驱动能力选择 stcXtalCfg.enFastStartup = Enable;/*XTAL超高速驱动允许 CLK_XtalConfig(&stcXtalCfg);//CMU XTAL 配置寄存器CLK_XtalCmd(Enable);//开启CMU XTAL while(Set != CLK_GetFlagStatus(ClkFlagXTALRdy)){;}/* MPLL config. */stcMpllCfg.pllmDiv = 1ul;//MPLL输入时钟分频系数stcMpllCfg.plln =50ul;//MPLL倍频系数stcMpllCfg.PllpDiv = 4ul;stcMpllCfg.PllqDiv = 4ul;stcMpllCfg.PllrDiv = 4ul;CLK_SetPllSource(ClkPllSrcXTAL);//时钟源选择 XTALCLK_MpllConfig(&stcMpllCfg);//CMU MPLL 时钟分频配置/* flash read wait cycle setting */EFM_Unlock();EFM_SetLatency(5ul);EFM_Lock();/* sram init include read/write wait cycle setting */stcSramConfig.u8SramIdx = Sram12Idx | Sram3Idx | SramHsIdx | SramRetIdx;stcSramConfig.enSramRC = SramCycle2;stcSramConfig.enSramWC = SramCycle2;stcSramConfig.enSramEccMode = EccMode3;stcSramConfig.enSramEccOp = SramNmi;stcSramConfig.enSramPyOp = SramNmi;SRAM_Init(&stcSramConfig); /* Enable MPLL. */CLK_MpllCmd(Enable);//用于开始停止MPLL。0:MPLL动作开始 1:MPLL停止/* Wait MPLL ready. */while(Set != CLK_GetFlagStatus(ClkFlagMPLLRdy)){;}/* Switch system clock source to MPLL. */CLK_SetSysClkSource(CLKSysSrcMPLL);//CMU 系统时钟源切换寄存器
}en_result_t SysTick_Init(uint32_t u32Freq)所在文件hc32f460_utility.c
__WEAKDEF en_result_t SysTick_Init(uint32_t u32Freq)
{en_result_t enRet = Error;if ((0UL != u32Freq) && (u32Freq <= 1000UL)){m_u32TickStep = 1000UL / u32Freq;/* Configure the SysTick interrupt */if (0UL == SysTick_Config(SystemCoreClock / u32Freq)){enRet = Ok;}}return enRet;
}
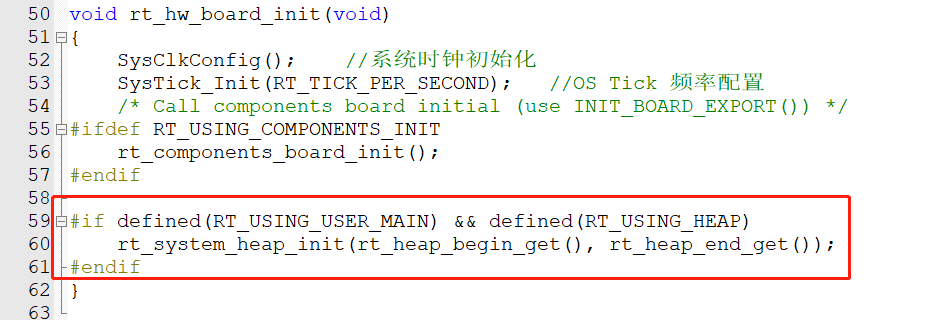
内存堆初始化
系统内存堆的初始化在 board.c 中的 rt_hw_board_init() 函数中完成,内存堆功能是否使用取决于宏 RT_USING_HEAP 是否开启,RT-Thread Nano 默认不开启内存堆功能,这样可以保持一个较小的体积,不用为内存堆开辟空间。
开启系统 heap 将可以使用动态内存功能,如使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。若需要使用系统内存堆功能,则打开 RT_USING_HEAP 宏定义即可,此时内存堆初始化函数 rt_system_heap_init() 将被调用,如下所示:
编写第一个应用
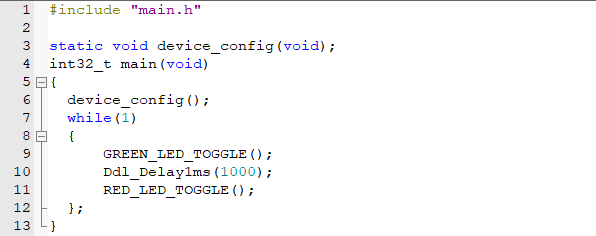
1.使用rt_thread_mdelay()函数
移植RT-Thread Nano之前跑马灯使用厂家库函数
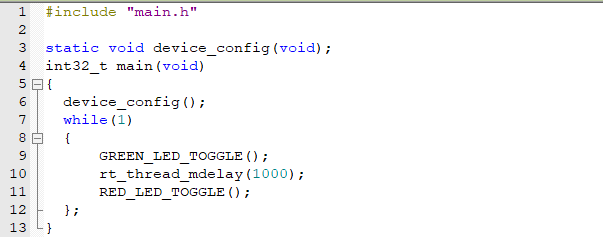
移植RT-Thread Nano之后跑马灯使用
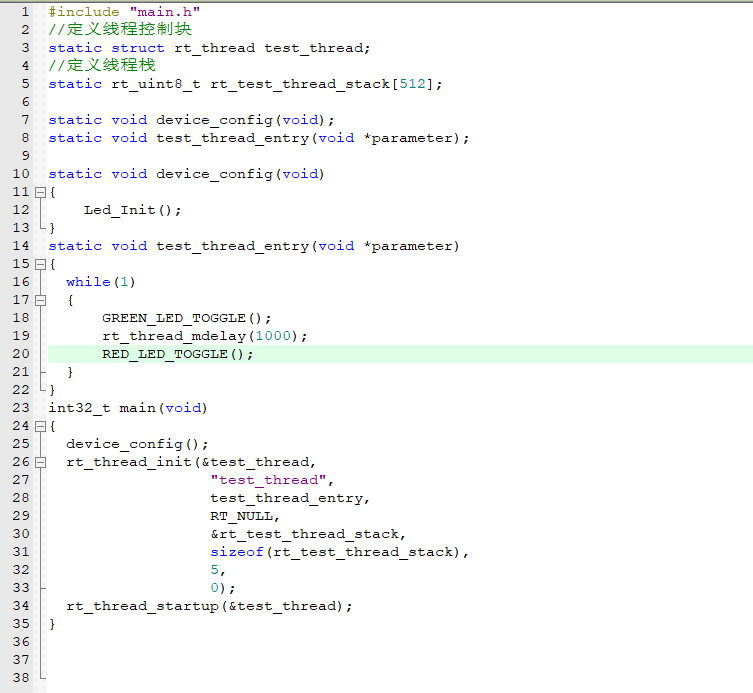
2.建立线程
在 Nano 上添加 UART 控制台
在 RT-Thread Nano 上添加 UART 控制台打印功能后,就可以在代码中使用 RT-Thread 提供的打印函数 rt_kprintf() 进行信息打印,从而获取自定义的打印信息,方便定位代码 bug 或者获取系统当前运行状态等。实现控制台打印(需要确认 rtconfig.h 中已使能 RT_USING_CONSOLE 宏定义),需要完成基本的硬件初始化,以及对接一个系统输出字符的函数。
实现串口初始化
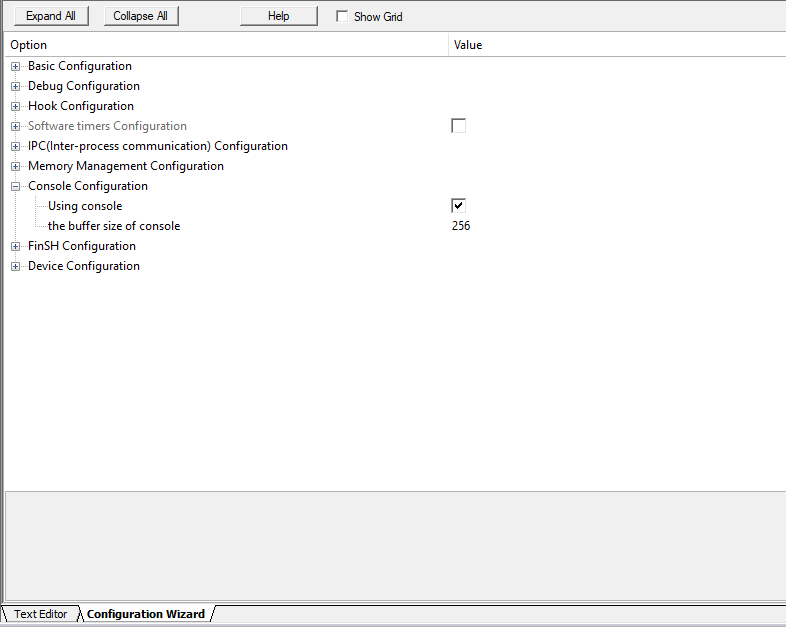
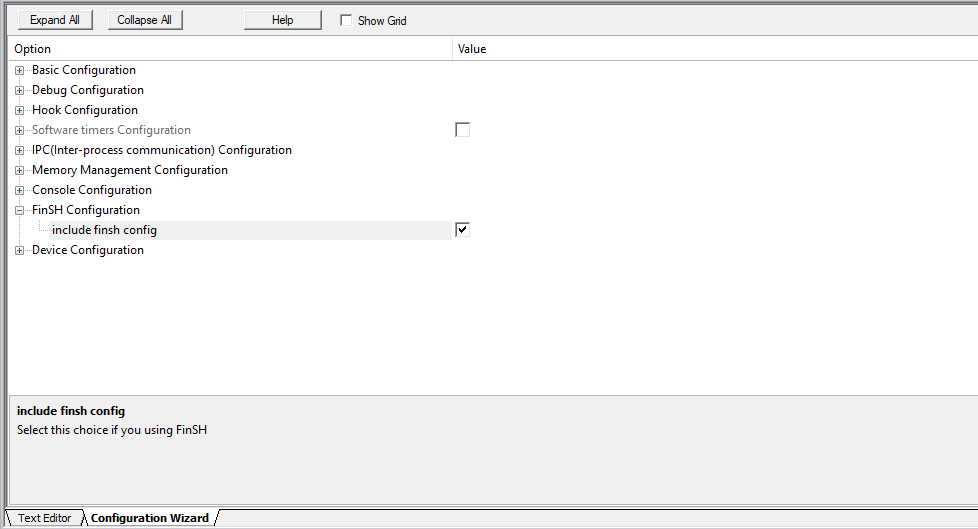
rtconfig.h中 Configuration Wizard->Console Configuration开启RT_USING_CONSOLE
usart.c
int rt_Usart_Init(void)
{uint32_t u32Fcg1Periph = PWC_FCG1_PERIPH_USART1 | PWC_FCG1_PERIPH_USART2 | \PWC_FCG1_PERIPH_USART3 | PWC_FCG1_PERIPH_USART4;const stc_usart_uart_init_t stcInitCfg = {UsartIntClkCkOutput,UsartClkDiv_1,UsartDataBits8,UsartDataLsbFirst,UsartOneStopBit,UsartParityNone,UsartSampleBit8,UsartStartBitFallEdge,UsartRtsEnable,};/* Enable peripheral clock */PWC_Fcg1PeriphClockCmd(u32Fcg1Periph, Enable);/* Initialize USART IO */PORT_SetFunc(USART_RX_PORT, USART_RX_PIN, USART_RX_FUNC, Disable);PORT_SetFunc(USART_TX_PORT, USART_TX_PIN, USART_TX_FUNC, Disable);/* Initialize UART */while(Ok != USART_UART_Init(USART_CH, &stcInitCfg));/* Set baudrate */while(Ok != USART_SetBaudrate(USART_CH, USART_BAUDRATE));/*Enable RX && RX function*/USART_FuncCmd(USART_CH, UsartRx, Enable);USART_FuncCmd(USART_CH, UsartTx, Enable);return 0;
}
INIT_BOARD_EXPORT(rt_Usart_Init);实现 rt_hw_console_output
usart.c
void rt_hw_console_output(const char *str)
{rt_size_t i = 0, size = 0;char a = '\r';size = rt_strlen(str);for (i = 0; i < size; i++){if (*(str + i) == '\n'){while (Reset == USART_GetStatus(USART_CH, UsartTxEmpty)) {}; /* Warit Tx data register empty */USART_SendData(USART_CH,(uint16_t)a);}while (Reset == USART_GetStatus(USART_CH, UsartTxEmpty)){}; /* Warit Tx data register empty */USART_SendData(USART_CH,(*(str + i)));}
}
RT_WEAK修饰函数 board.c中rt_hw_console_output(const char *str),不然会报重定义。
RT_WEAK void rt_hw_console_output(const char *str)
{
//#error "TODO 3: Output the string 'str' through the uart."
}
验证结果
##在 Nano 上添加 FinSH 组件(实现命令输入)
####添加FinSH组件
点击 Manage Run-Environment,勾选 shell,这将自动把 FinSH 组件的源码到工程
rtconfig.h中 Configuration Wizard->Console Configuration开启RT_USING_CONSOLE
实现rt_hw_console_getchar(void)函数
usart.c
char rt_hw_console_getchar(void)
{int ch = -1;if (Set == USART_GetStatus(USART_CH, UsartRxNoEmpty)){ch = USART_RecData(USART_CH);}return ch;
}
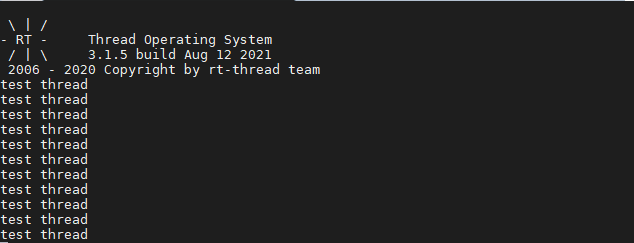
验证结果
HC32F460移植RT-Thread Nano结束

近来芯片缺货大幕拉开,掀起新一轮国产替代浪潮。RT-Thread发起一场国产MCU移植贡献活动,邀请开发者们参加!
活动详情:国潮崛起!RT-Thread国产MCU移植贡献活动开启!
这篇关于【国产MCU移植】HC32F460基于Keil MDK 移植 RT-Thread Nano的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!