本文主要是介绍粒子滤波(Particle Filter)在目标跟踪(Object Tracking)中的应用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关于粒子滤波的理论知识请参考我另外一篇博文《粒子滤波(Particle Filter)》。这里具体说一下粒子滤波在目标跟踪中的应用。
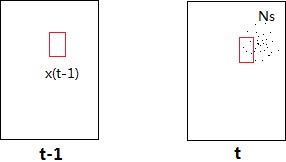
图中红方框为目标或其候选。
已知第t-1帧中目标的位置,要在第t帧图像中预测目标。由于未知状态转移方程f,我们不能直接利用x(t-1)得到x(t)。通常的做法是以x(t-1)位置(即左图中的红方框)的中心为均值,按照高斯分布(也即正态分布)产生Ns个样本点(即粒子),如右图中黑点所示。将这Ns个样本点对应的图像特征(比如颜色直方图)作为观测值。计算这Ns个样本点与x(t-1)或者某个模板之间的相似度,再将这Ns个相似度转化成相应的权值并归一化。最后将Ns个样本点的特征带权求和作为x(t)。
未完待续......
这篇关于粒子滤波(Particle Filter)在目标跟踪(Object Tracking)中的应用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





