本文主要是介绍自适应巡航系统(Adaptive Cruise Control),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 定义
自适应巡航系统(ACC),是一种驾驶辅助系统,用于道路车辆,通过相应的传感器自动的调整车辆(i.e., Ego vehicle)的速度,以保持与前车(i.e., Lead vehicle)之间的安全距离。
2. 模式的分类
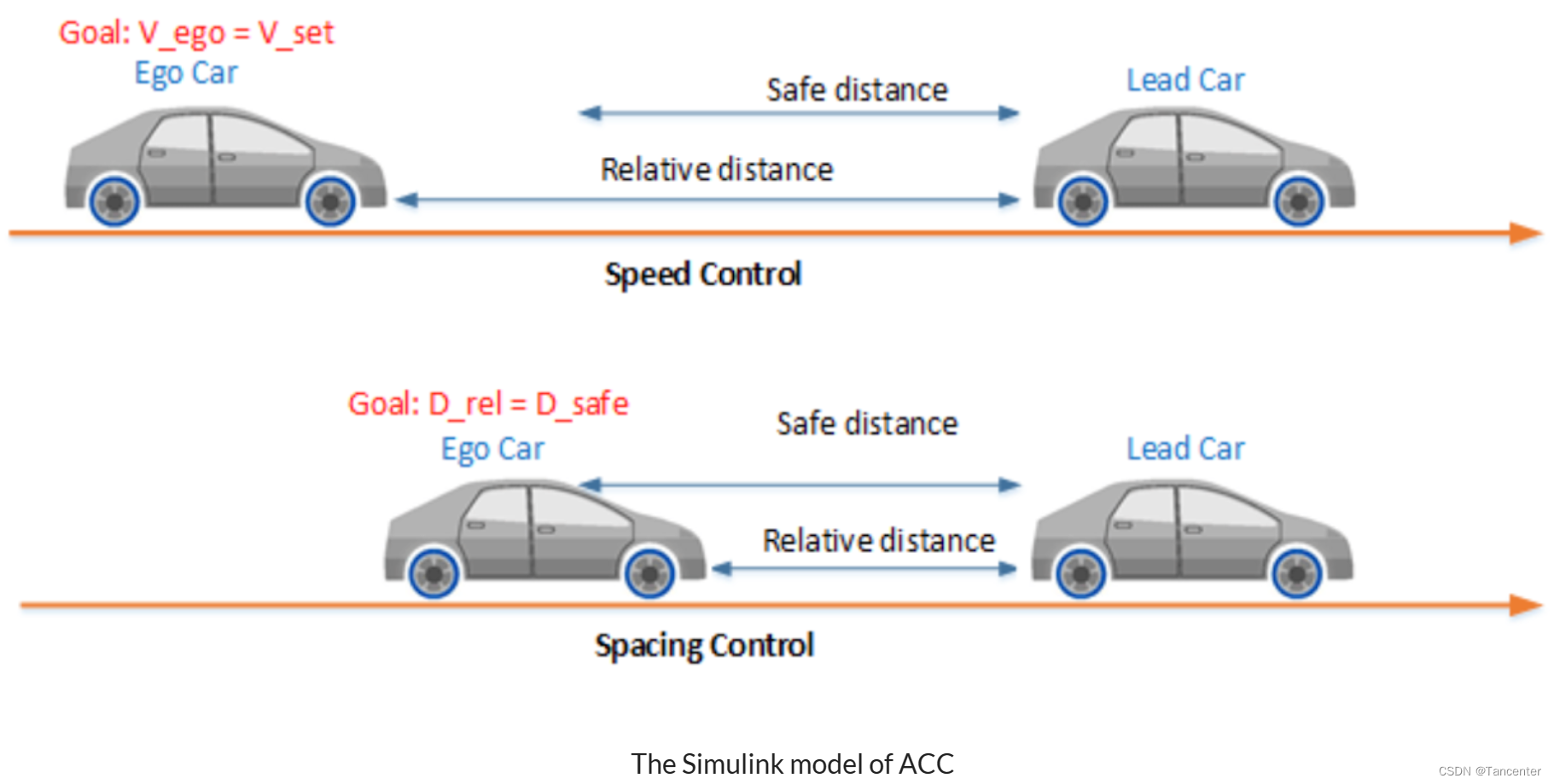
ACC有两种控制模式:(1). Speed control,按照驾驶员设定的速度行驶;(2). Spacing control,保障ego vehicle与lead vehicle之间的安全距离。
混合模式控制:当ego vehicle和lead vehicle之间的距离太近,可以采取Spacing control控制ego vehicle,保证与leading vehicle保持一个安全距离。当车距等于或者超过安全距离,采用Speed control, 按照驾驶员设定的速度去行驶。
这篇关于自适应巡航系统(Adaptive Cruise Control)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







