本文主要是介绍开源ESP32智能小车机械臂控制板Baize_Carboard(支持mixly),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
介绍
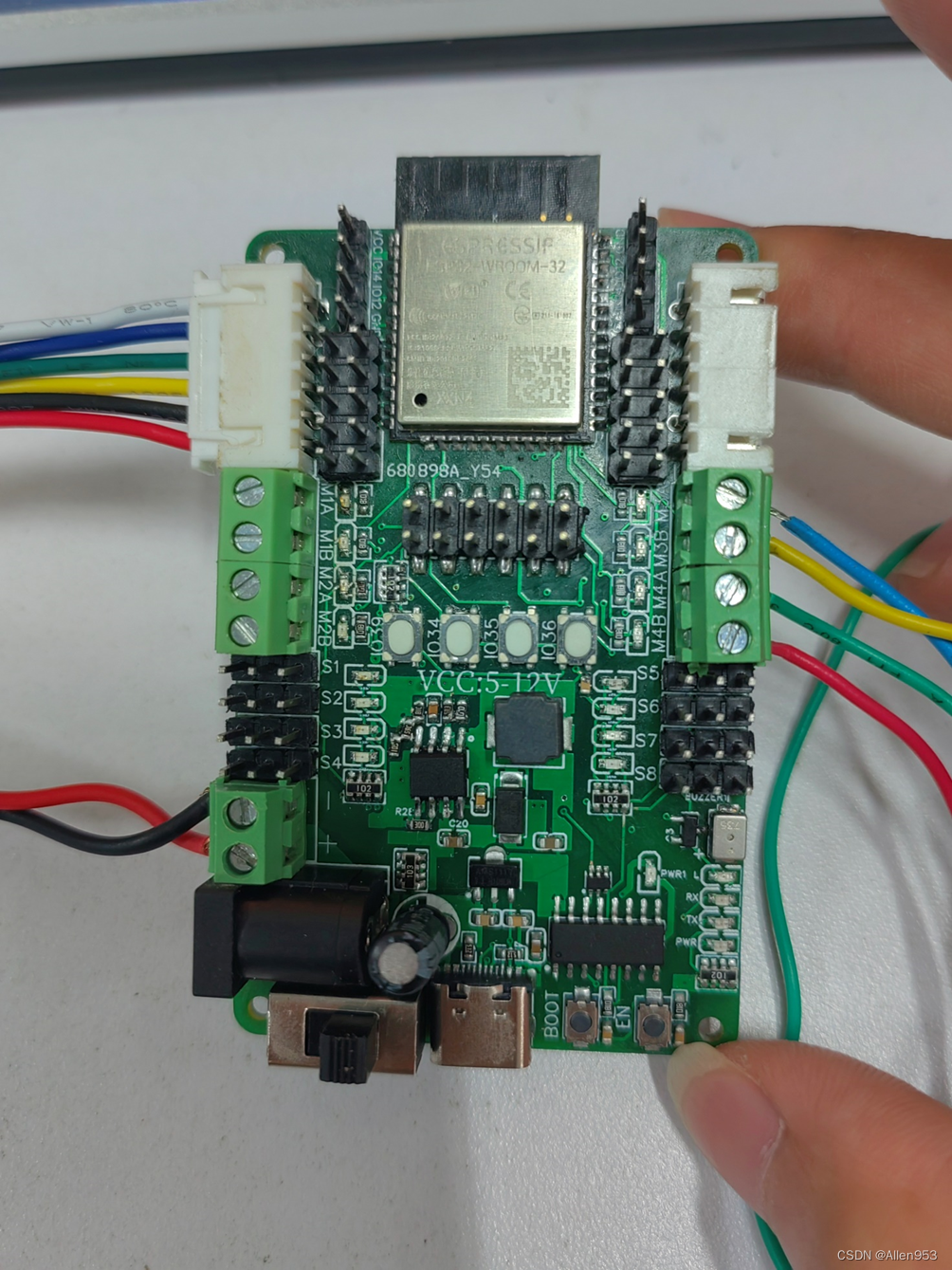
采用esp32做主控的Baize_Carboard,支持4路直流电机或者两路步进电机的控制,也可以用于控制两路直流闭环电机。输入电压范围5-12V,有时候电压5V起不来,要高一点。可以用于学习arduino或者ros编程,同时也可以将ros于arduino结合。
资料下载
最新代码在这里:GitHub - Allen953/BaizeCarboard: a pcb board for ros smart car

程序源码
首先打开3.Software这个文件夹,找到如下路径,可以看到有两个程序例程,一个是控制板子上的led灯的,一个是控制步进电机的。
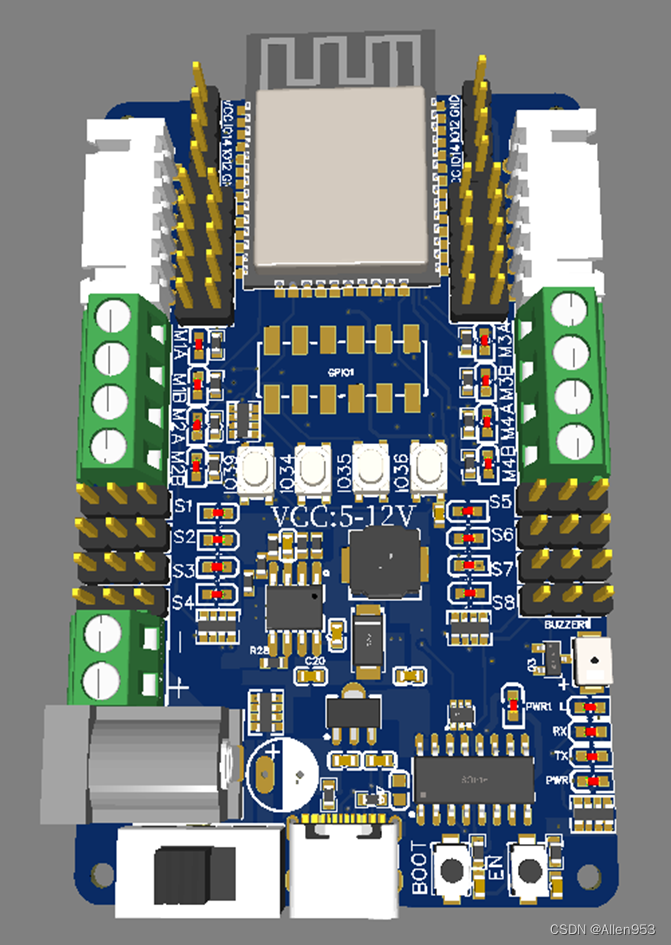
3D模型
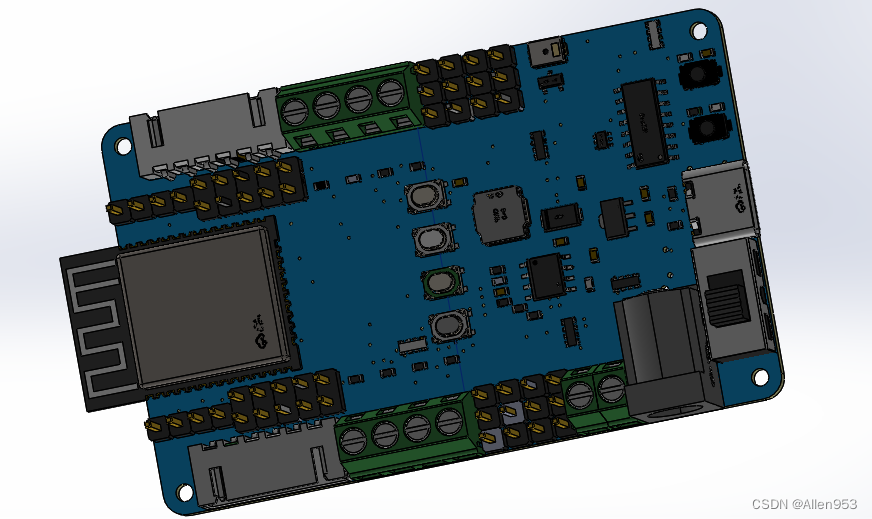
3D模型如下
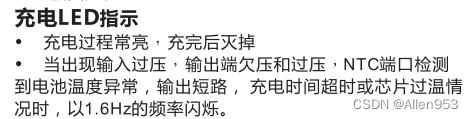
充电芯片CS5090E芯片手册http://www.szczkjgs.com/UploadFiles/fujian/3834/CS5090.pdf
这篇关于开源ESP32智能小车机械臂控制板Baize_Carboard(支持mixly)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!