本文主要是介绍Ubuntu18.04下安装xsens MTi-600系列上位机及驱动,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
因为最近实验室的工控机到了,需要把一些设备的驱动安装上去,特此记录一下,方便实验室的师兄师姐师弟师妹们和有同样需求的各位参考,有不足的地方也请各位指正,接下来回归正题:
(实验室的惯导设备为xsens MTi-670)
1.安装xsens MTi-600系列的上位机MT manager
进入官网,找到下图的位置,即可下载对应架构的安装包,应该是2019版本的。

或者直接通过我的网盘分享,下载2021版本的安装包,目前我在工控机上安装的是2021版本的MT manager,网盘链接:
链接:https://pan.baidu.com/s/1kQR7ZBDRYEDAdkEEBY3eAA
提取码:ok8c
下载完成后,解压到相应位置即可(网盘的是解压完成后的)。
tar -xvzf MT_Software_Suite_linux-x64_2021.4.tar.gz
同时利用同样的解压命令,解压安装包内其余两个.tar.gz文件。
首先安装相应的依赖:
sudo apt-get update -y
sudo apt-get install -y sharutils
sudo apt-get install libxcb-xinerama0 libxcb-xinput0
然后在解压的目录下先运行mtsdk_linux-x64_2021.4.sh文件,使用sudo命令默认在/usr/local/生成xsens文件
sudo ./mtsdk_linux-x64_2021.4.sh
当前也可以先不执行mfmsdk_linux-x64_2021.4.sh文件就可以运行MT manager上位机,生成的xsens_ros_mti_driver中有两个文件,一个是为了在ROS 中观察Rviz中的模型运动是否准确,另一个是用于MTI系列产品发送消息。此项后续详述。
然后给出口赋权限:
sudo chmod 777 /dev/ttyUSB0
按照MT_Software_Suite_linux-x64_2021.4/mtmanager/linux-x64/bin此路径找到bin目录下的mtmanager可执行文件,可以直接双击打开,也可以在此目录下打开一个终端输入以下命令运行:
./mtmanager
安装成功的话会出现如下的界面:

平时主要用到的几个功能是:(从左到右介绍):
 :输入输出配置的窗口,打开后显示如下,包含有软件的版本号、输出配置、输入参数修改等。
:输入输出配置的窗口,打开后显示如下,包含有软件的版本号、输出配置、输入参数修改等。

 :搜索单个设备
:搜索单个设备
 :搜索多个设备
:搜索多个设备
 :断开设备
:断开设备
 :查看3D视图
:查看3D视图
 :惯性数据图
:惯性数据图
对于标定最重要的功能是:
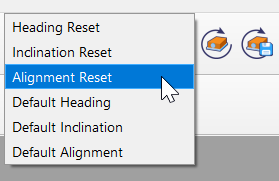
无论IMU怎么安装,安装好之后点击上图中的三个Reset功能,将所有数据清零,以当前位置为标准,然后再点击 进行应用,如果需要掉电保存,需要点击
进行应用,如果需要掉电保存,需要点击 ,重启后IMU会以上次标定的参数进行工作,其他的功能看自己需要去使用。
,重启后IMU会以上次标定的参数进行工作,其他的功能看自己需要去使用。
2.安装xsens_ros_mti_driver
(1)首先创建一个工作空间,以catkin_ws为例,可以根据自己需求命名。然后将/usr/local/xsens/下的xsens_ros_mti_driver文件夹复制到工作空间的src目录下,可以直接复制也可以使用命令复制。
cp /usr/local/xsens/xsens_ros_mti_driver ~/catkin_ws/src/
此处的xsens_ros_mti_driver也可以在我的网盘里下载,链接:
链接:https://pan.baidu.com/s/1fw1tYKyNHhglSKPQpG_O1g
提取码:cnyw
自己解压一下就行,放到src下边。
(2) 确认当前文件和目录的权限为o+rw,如果是则不需要修改,我用的时候不用修改,如果权限不是则需要修改:
chmod -R o+rw xsens_ros_mti_driver/
(3)从catkin工作区构建xspublic,pushd是目录入栈,popd是目录出栈:
pushd ~/catkin_ws/src/xsens_ros_mti_driver/lib/xspublic && make && popd
(4)编译:
cd ~/catkin_ws
catkin_make
(5)关机重启!!:经过测试,编译成功后,直接运行launch文件的话会出现No MTi device found
(6)运行roslaunch,选择其中一个launch文件运行,同时运行会报错:
source devel/setup.bash
roslaunch xsens_mti_driver display.launch
# 在ROS 中观察Rviz中的模型运动
roslaunch xsens_mti_driver xsens_mti_node.launch
# 用于MTI系列产品发送消息
选择display.launch,会自动打开Rviz,移动xsens,观察Rviz中的模型运动是否准确:

(7)重新打开一个终端,查看当前的话题,并打印话题/imu/data的数据:
rostopic list
rostopic echo /imu/data
检查输出的数据是否正确,此处不再赘述,到此xsens MTi-600系列上位机及驱动就安装完成了。
文章参考:
https://blog.csdn.net/weixin_38296260/article/details/122600718
这篇关于Ubuntu18.04下安装xsens MTi-600系列上位机及驱动的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








