本文主要是介绍三相异步电动机仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
异步电动机的仿真-----JUST-17
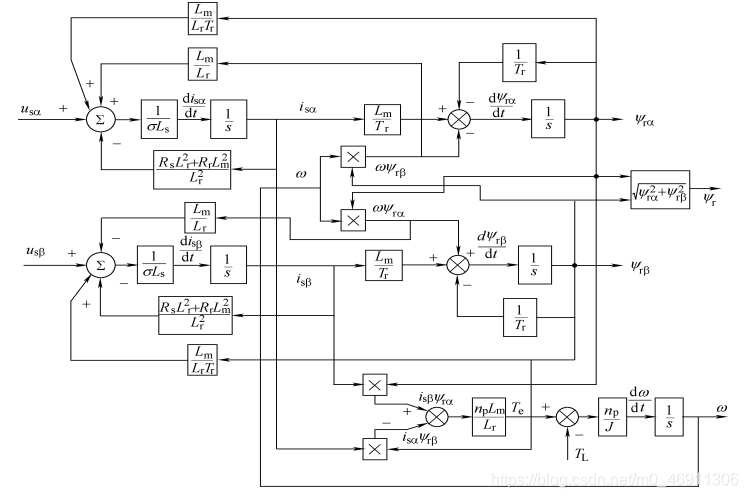
在课本中介绍的四种方式的状态方程,都是对异步电动机的数学描述,在进行异步电动机仿真时,没有必要对四种状态方程逐一进行,只要以其中一种作为内核,在外围加上坐标变换和状态变换,就可以得到在不同的坐标系下、不同状态量的仿真结果。因此,以异步电动机在αβ坐标系中为状态变量的状态方程结构为核心,构建异步电动机仿真模型。
一、异步电动机仿真框图及参数
二、 电源AC设计
在simulink 中找sine wave 模快,拖到空白处
因为是三相电源,因此在这里要放置三个,分别为UA,UB,UC。如下图
电压设置成380,频率314.1593
三、二分之三变换,三分之二变换
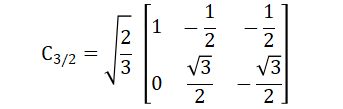
3.1 3/2变换
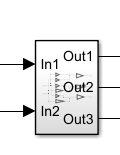
对应模块为:
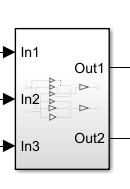
3/2变换矩阵为下图,这里需要自己根据参数计算,不做过多赘述。
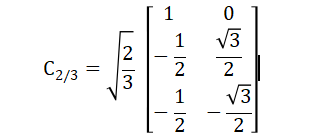
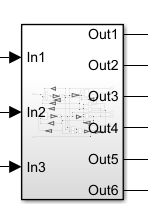
3.3 2/3变换
对应3.1
变换环节为:
变换矩阵为:
到这里你才完成了这项工作的一小部分!!!!!!
一定要耐心。
四、电动机模型搭建
4.1封装好的模块如下图:
4.2封装好内部结构图:
具体参数根据电力拖动自动控制系统——运动控制系统第五版:阮毅 杨影主编
第七章7.10.1小结进行计算。
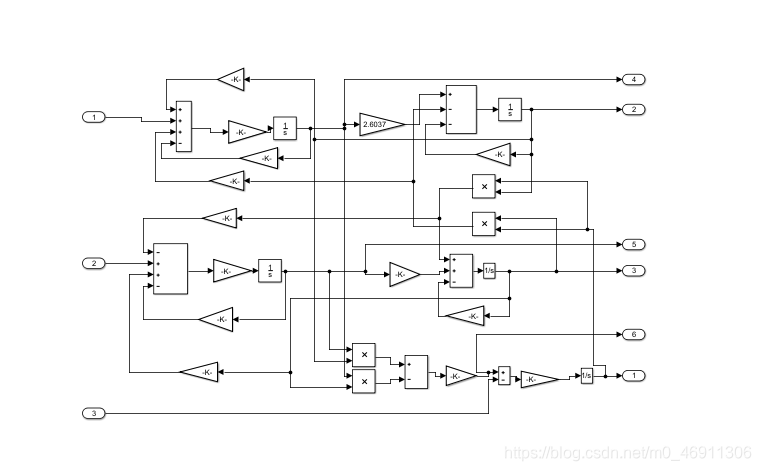
搭建的过程是很费工夫的,希望读者可以耐心一些,计算参数的时候要小心,精确度要高一些。尽量保持到小数点后5位。
记住要在电动机的后面加负载转矩,参数设置时间为2s,转矩为20.(这个自己随便调节)
最后就是一些小东西了,比如示波器,在你想要输出信号的地方加上就可以了。
五、系统总体结构图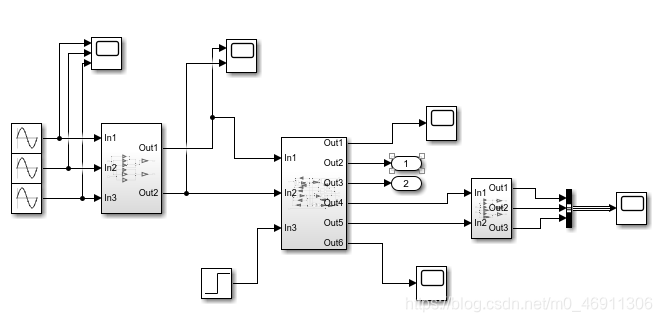
创作不易,且行且珍惜!
这篇关于三相异步电动机仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








