本文主要是介绍【Proteus仿真】74LS194组成的8个led流水灯,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【Proteus仿真】74LS194组成的8个led流水灯
- Proteus仿真

原理图

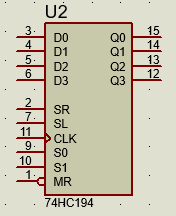
- 74LS194
移位寄存器是指寄存器中所存的代码能够在移位脉冲的作用下依次左移或右移。74LS194是一个4位双向移位寄存器,最高时钟脉冲为36MHZ.
其中:D0~D1为并行输入端;Q0~Q3为并行输出端;SR右移串引输入端;SL–左移串引输入端;S1、S0-操作模式控制端;MR-为直接无条件清零端;CLK为时钟脉冲输入端。
S1S0取值为11时,做置位操作,当为01时,做右移操作。
仿真资源
本实验基于
这篇关于【Proteus仿真】74LS194组成的8个led流水灯的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








