本文主要是介绍UE5 录制透明png序列帧,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
以下是在 Unreal Engine 5 中录制透明 PNG 序列帧的详细步骤:
步骤1:创建一个场景
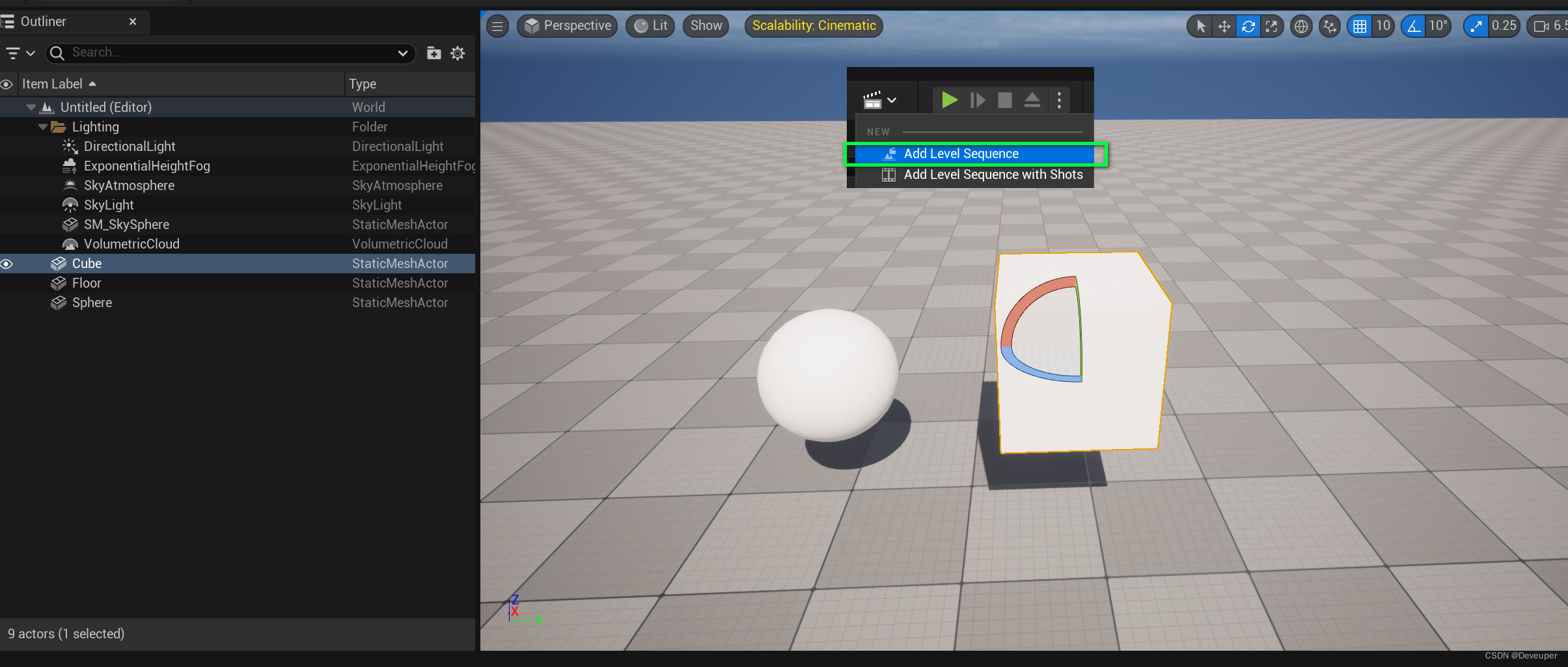
步骤2:打开序列录制器
在 Unreal Engine 5 中,首先需要打开序列录制器。你可以通过点击顶部菜单栏的 窗口 > 开发人员工具 > 序列录制器 来打开它
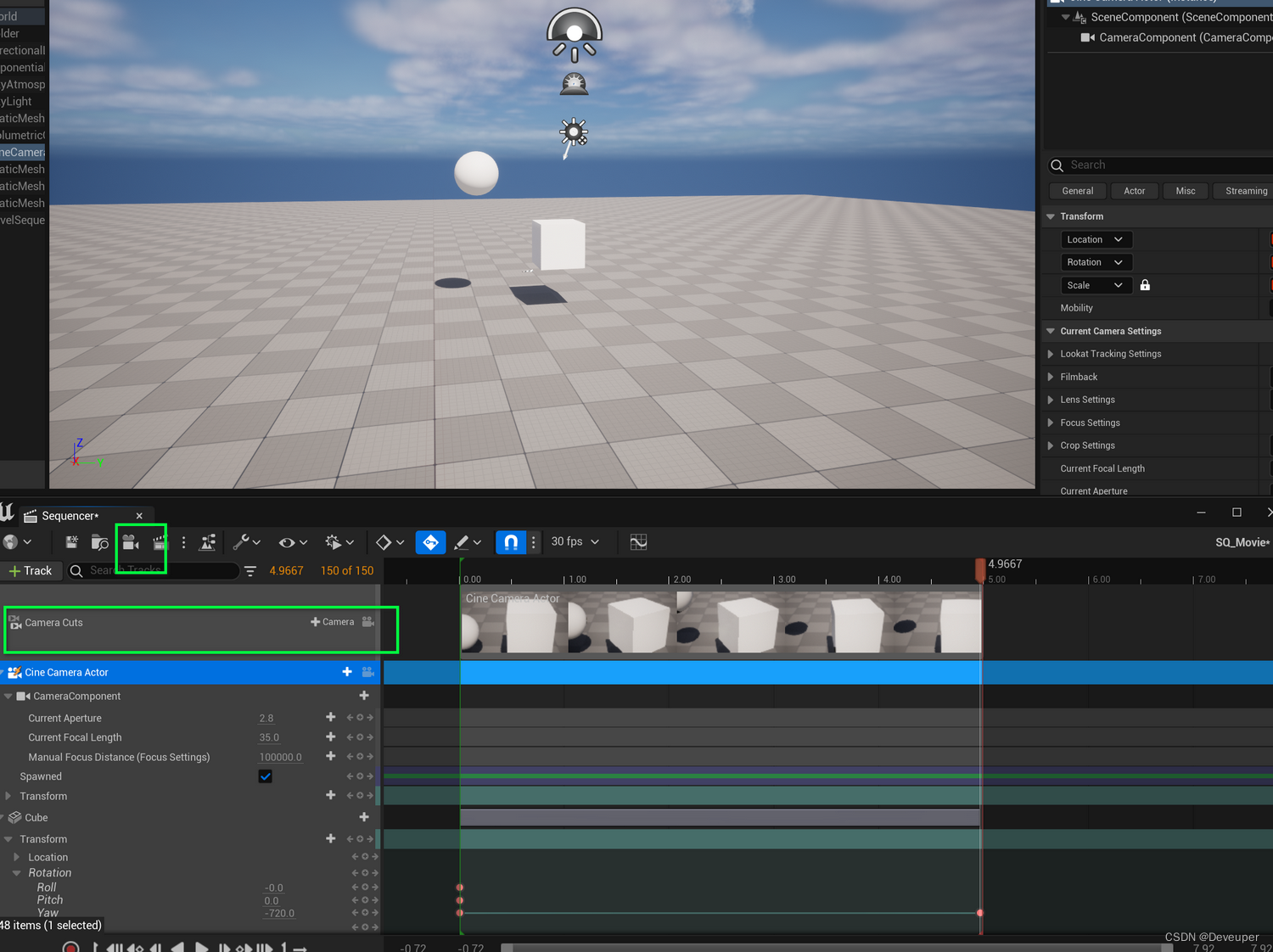
录制一个sequence视频,注意,一定要有一个cine camera actor
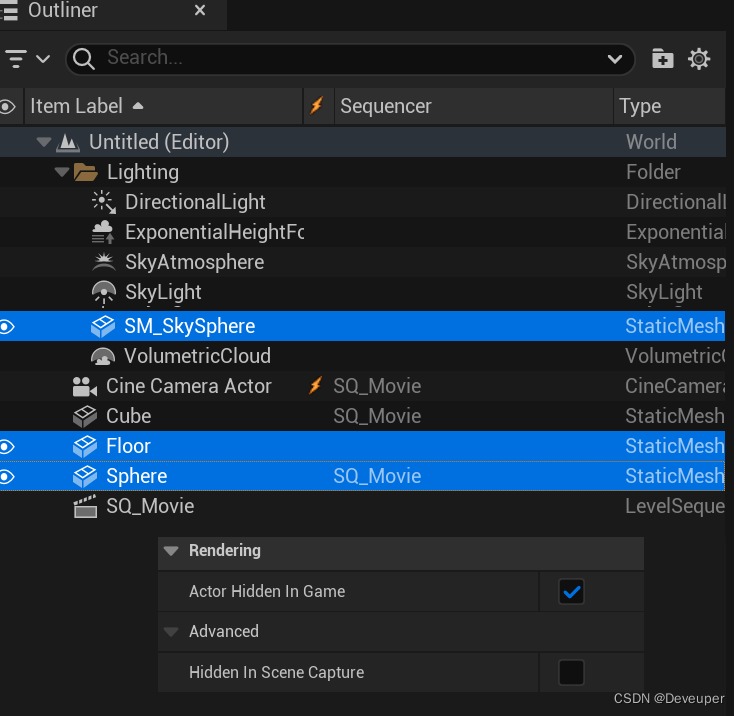
步骤3:隐藏透明的物体和背景
在大纲面板中,不需要显示的物体、背景物体,进行隐藏,这些对象可以是角色、摄像机、灯光等
(actor hidden in game)。
步骤4:开始录制
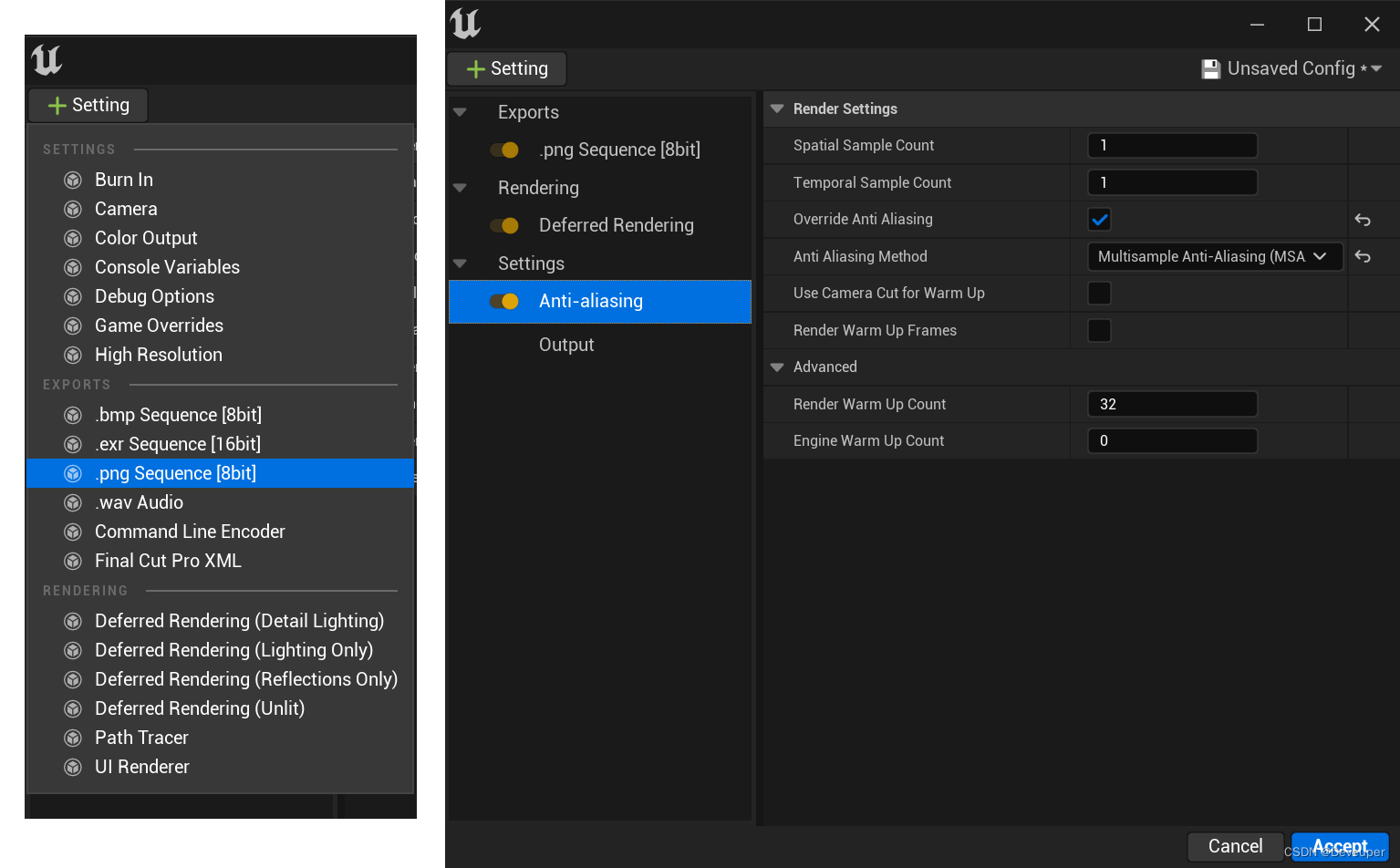
录制后,点击record按钮,点击config,在弹出的窗口进行设置
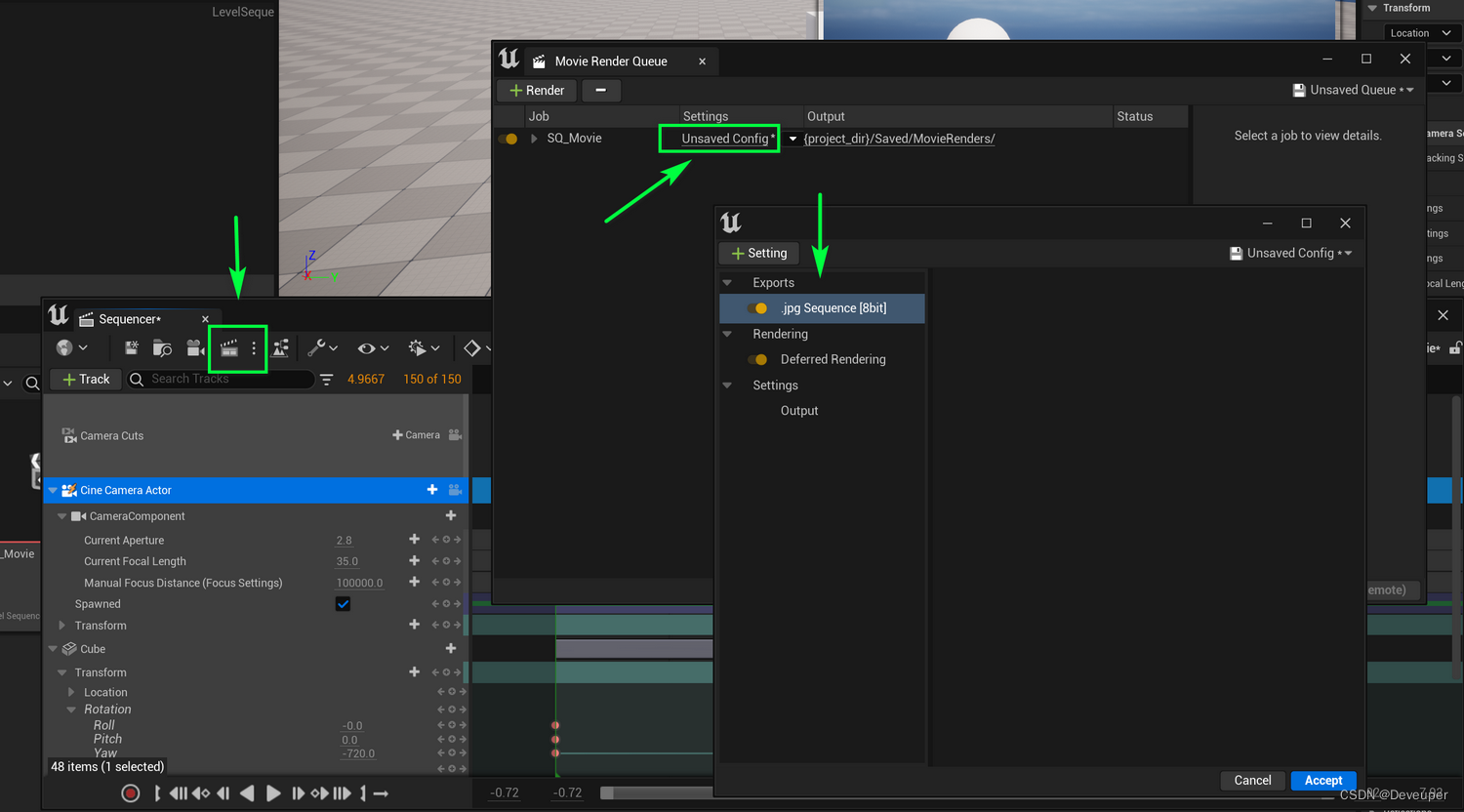
添加png序列,如果有需要 添加抗锯齿,并设置
注意:如果导出后有虚影,在项目设置或者Postprocessing中关闭运动模糊(motion blur)
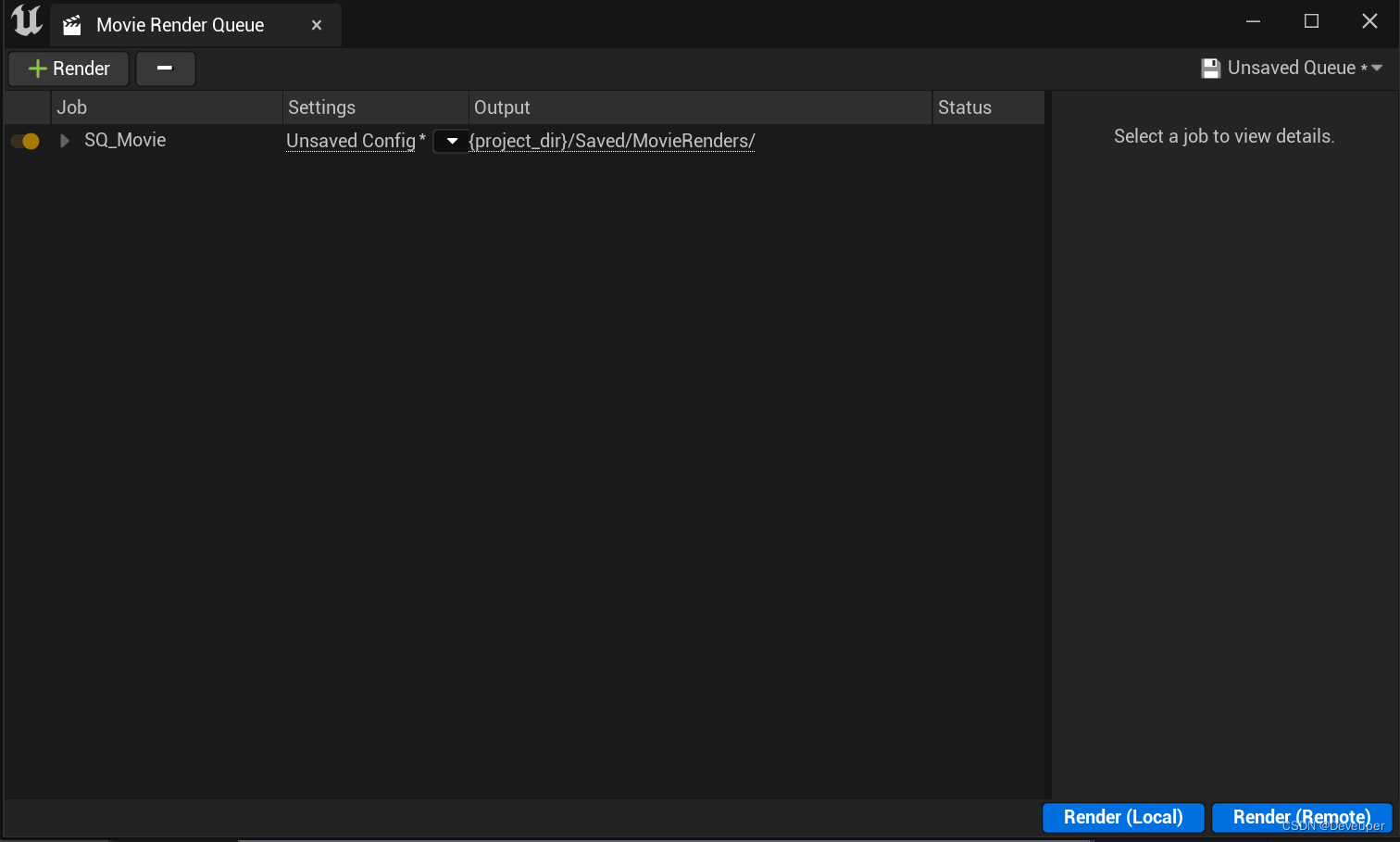
步骤5:导出为 PNG 序列帧
设置后,点击Render(local),导出即可。
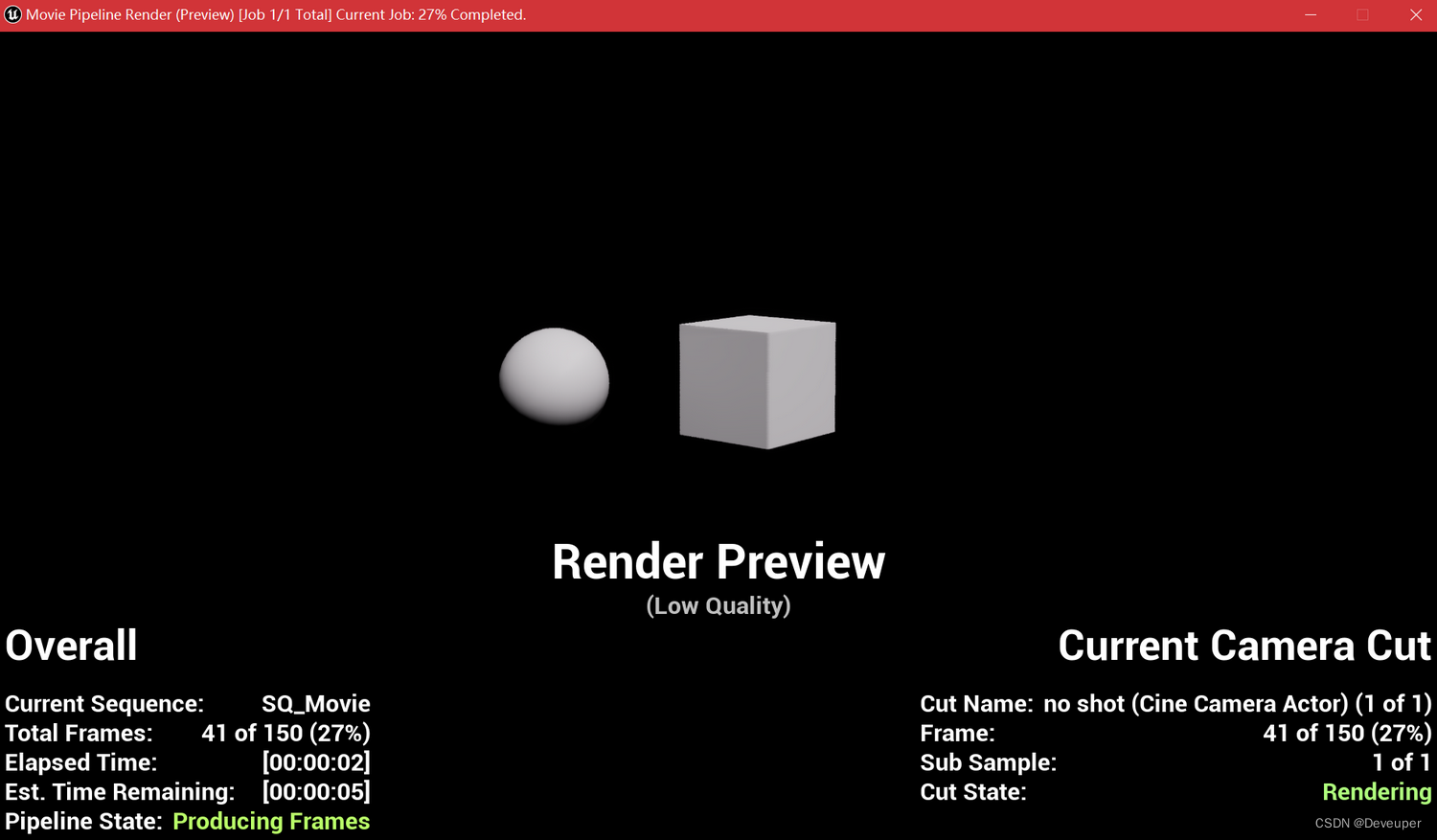
等待渲染完毕
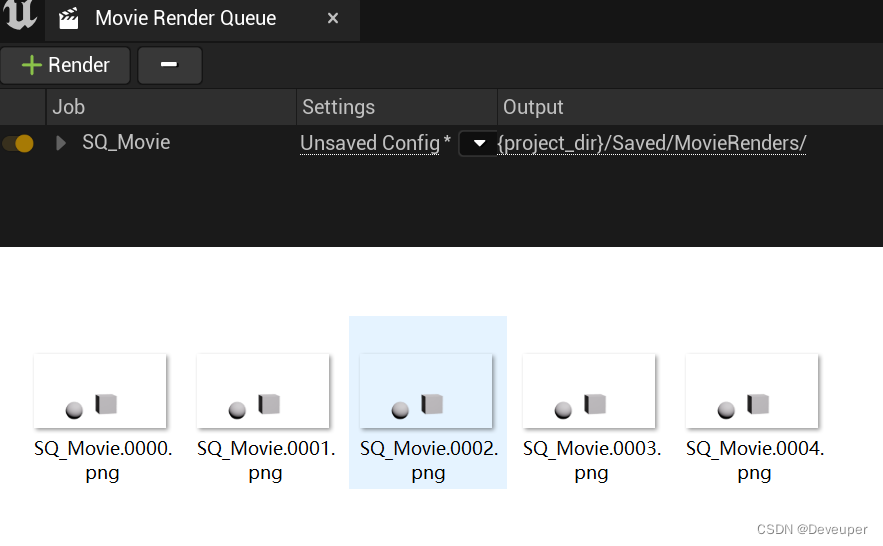
在面板中,找到输出位置,查看输出图片
以上就是在 Unreal Engine 5 中录制透明 PNG 序列帧的详细步骤。希望对你有所帮助!
注意:以上图片和步骤是基于 Unreal Engine 5.2 ,Unreal Engine 4.26 的具体操作可能会有所不同。请根据实际情况进行操作。
这篇关于UE5 录制透明png序列帧的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








