本文主要是介绍【嵌入式】智能小车—手机控制小车行进,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 【嵌入式】智能小车—手机控制小车行进
- 一、实验内容:
- 二、实验过程介绍
- 1.硬件准备:
- 2.系统的总电路图:
- 3.分模块功能:
- (1)小车灯模块:
- (2)电机模块:
- (3)舵机模块:
- (4)通信模块:
- (5)蜂鸣器模块:
- (6)超声波模块:
- 4.整体设计:
- (1)手机APP界面:
- (2)整体实现的功能、思路及步骤:
- (3)实验主要代码:
- 5.实验中遇到的问题及解决方法:
【嵌入式】智能小车—手机控制小车行进
一、实验内容:
1.完成智能小车的组装;
2.为组装好的小车进行系统录入,并确认板子焊接完好,无断线;
3.通过小车的电路图,并利用keil uVision5和STM32Cube MX等软件对小车的各个模块进行编写程序;
4.应用微控制器的端口、外部中断、定时器等基本模块对小车实现基本控制;
5.通过控制按键来实现小车上灯光的闪烁控制;
6.结合电源板、电机驱动板来控制电机的转动,实现小车的行进;
7.加上红外线传感器,来实现小车的测距,加上蜂鸣器实现小车的报警;
8.加上摄像头和舵机,来实现摄像头的360度旋转;
9.实现小车与PC机的串口通信;
10. 对小车加上WiFi模块可以连接手机APP,通过控制手机APP来实现小车的基本功能:前进、后退、转弯、红外线测距。
二、实验过程介绍
1.硬件准备:
将小车组装好,检查各模块焊接无误:电源模块、单片机模块、红外线传感器模块、电机模块。



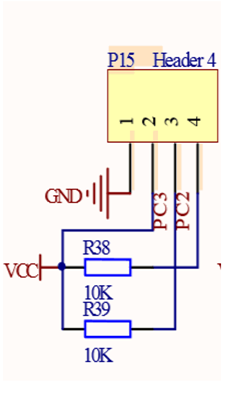
2.系统的总电路图:

(1) 芯片模块:

(2) 电源模块:

(3) 电机模块:

(4) 蜂鸣器模块:

(5) 超声波模块:
3.分模块功能:
这篇关于【嵌入式】智能小车—手机控制小车行进的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





