本文主要是介绍前车检测——对称性检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
依据对称性特征对障碍物进行检测,依照一般定性的分析方法,我们只能知道障碍物是否是对称的,但是在这里仅仅利用对称性的定性分析是不够的,必须能够用数学的形式对其进行定量的描述,下面将对称性的定量分析进行了介绍。本文利用连续对称的概念,建立了定量的方法来度量对称性。图像中的一行灰度数据可视为水平像素坐标的一维函数g(x),(我们不需要知道函数是什么,因为我们最终计算只是用这个函数值,这个类似于核函数的感觉)。
任何函数都可以写成一个偶函数![]() 和奇函数
和奇函数![]() 之和的形式,
之和的形式, ![]()
![]()
![]()
奇偶函数的重要性:
![]()
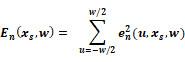
奇偶函数的能量函数如下:


再对偶函数做如下的归一化处理,如下,使其均值为0,

利用能量函数定义对称性的测量值如下:
![]()
对称性测量值为(-1,1)区间内的任意数,S=1表示完全对称,S=0表示不对称,S=-1表示反对称,测度 ![]() 与参数
与参数 ![]() 是一一对应的。
是一一对应的。
需要把上面的公式要实现为代码,图像中的一行灰度数据可视为水平像素坐标的一维函数g(x)。
前车一般是水平对称性较强,所以可以把检测到的疑似前车的矩形roi的一列灰度数据分别累加,作为g(u)。
这篇关于前车检测——对称性检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









![[数据集][目标检测]血细胞检测数据集VOC+YOLO格式2757张4类别](https://i-blog.csdnimg.cn/direct/22c867ab717d44c78b985ed667169b42.png)