本文主要是介绍运动控制:音圈电机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在运动平台中,对于微小运动,例如1-5毫米,甚至更小的行程,常用音圈电机来驱动。
因为它们具有体积小,运动质量小,高加速度等显著特征。
无论是在工业领域,还是在医用内窥镜,呼吸机,以及摄像头调焦等方面都有广泛的应用。
比如小位移吸取头,常用扁平型音圈电机驱动,配合LVDT绝对式位移传感器,检测运动轴位置。
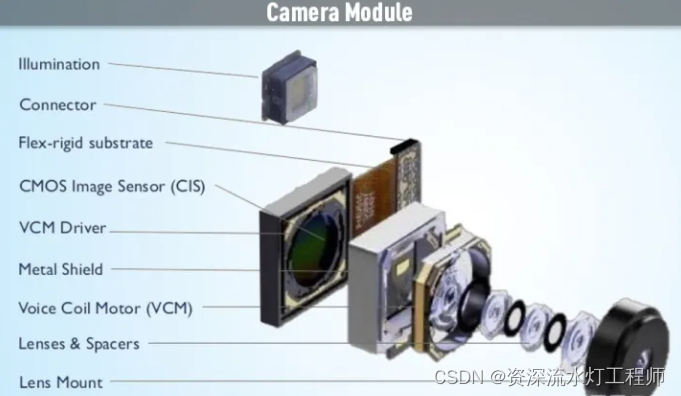
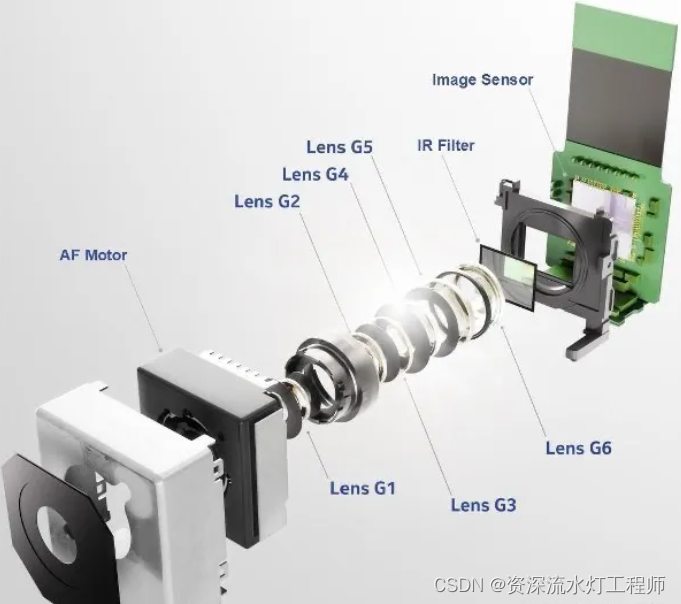
再比如,手机摄像头中,用圆柱形音圈电机,来带动镜头运动,实现调焦。
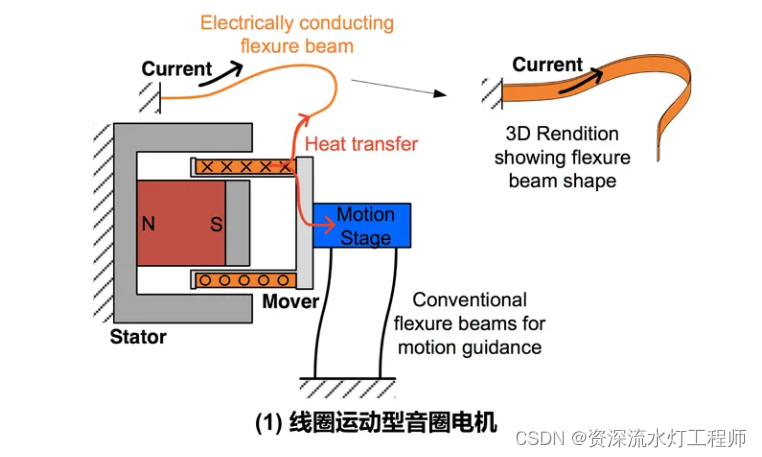
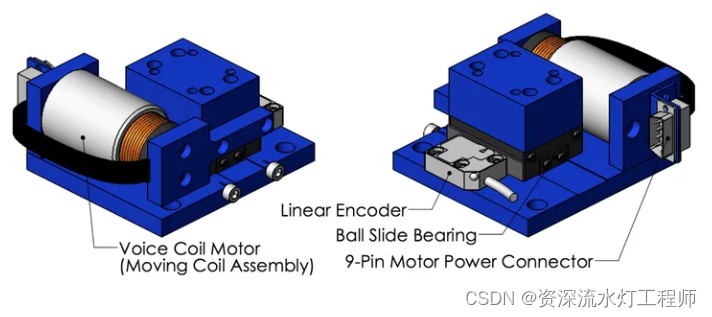
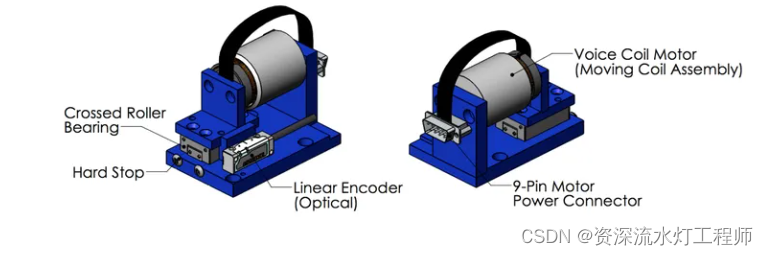
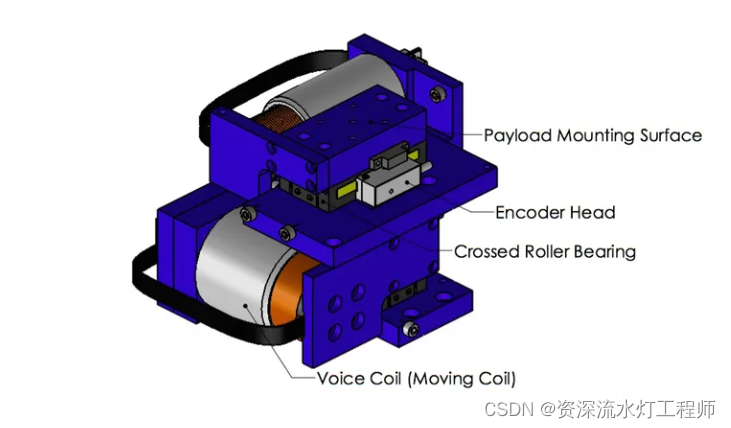
线圈运动式单轴音圈电机驱动平台
音圈电机用于微摄像头调焦
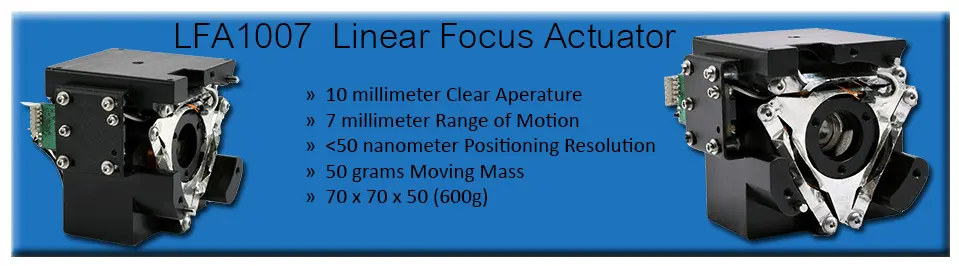
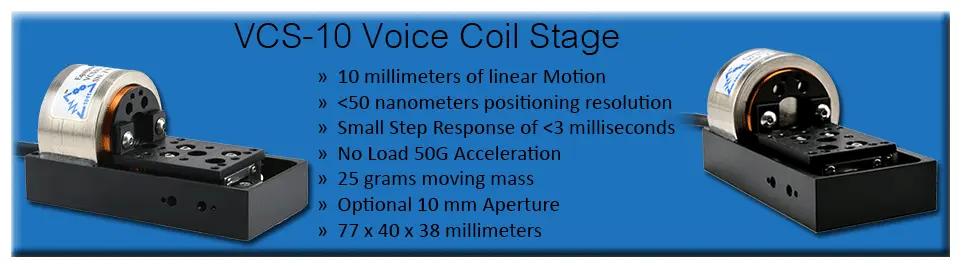
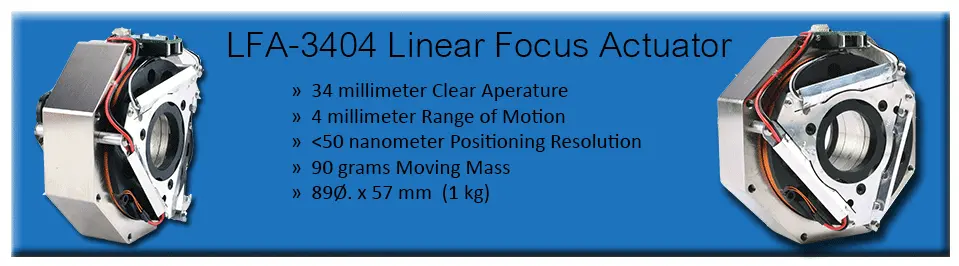
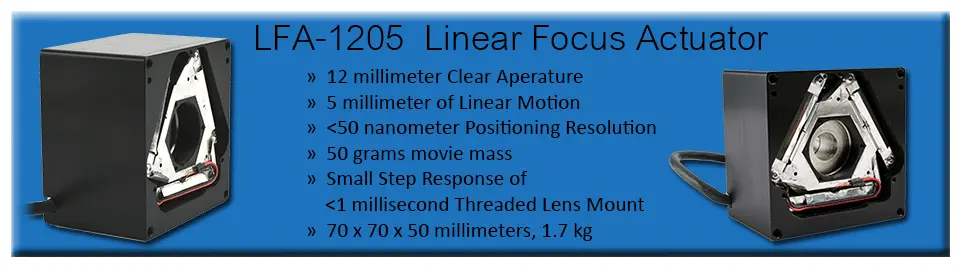
不同形式的音圈电机驱动平台和调焦平台及其参数
那么,何为音圈电机(VCM=Voice Coil Motor)?其运动原理是什么?
1. 什么是音圈?
首先,什么是音圈?
音圈一词,其实来源于扬声器。
它实质上就是一个线圈。
在扬声器中,用来产生(展示)声音信号,所以叫音圈,多亏了它,我们才能听到美妙的音乐。
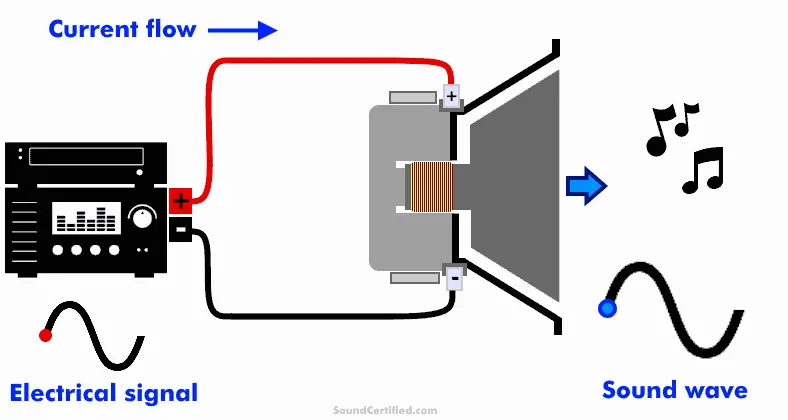
扬声器的底层逻辑,其实也是带电导线在磁场中受洛伦兹力,发生有规律的运动,带动相关部件振动,进而发出声音。
我们来具体看一下。
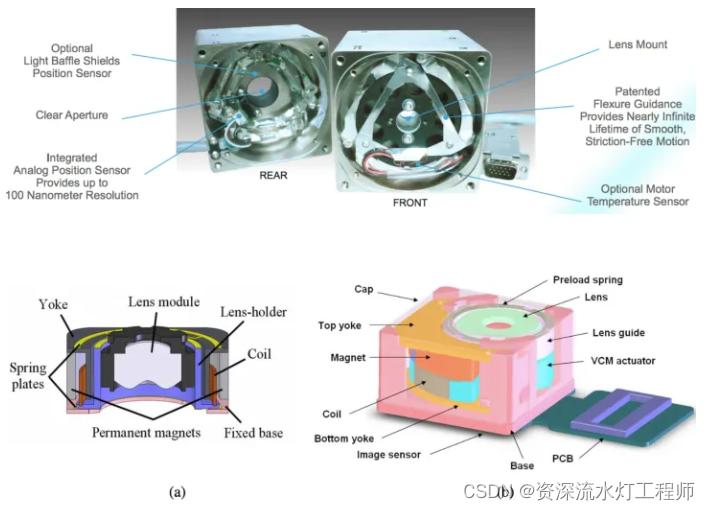
音圈(线圈)缠绕在椎体上,永磁体南北极如上左图(a)所示,内圈是北极,外圈是南极,在剖视图(b)中,磁场穿过音圈导线向外辐射,当导线通声音信号(电流)时,音圈在左右方向受力,发生运动,带动锥体振动,通过空气把声音扩散到外部。
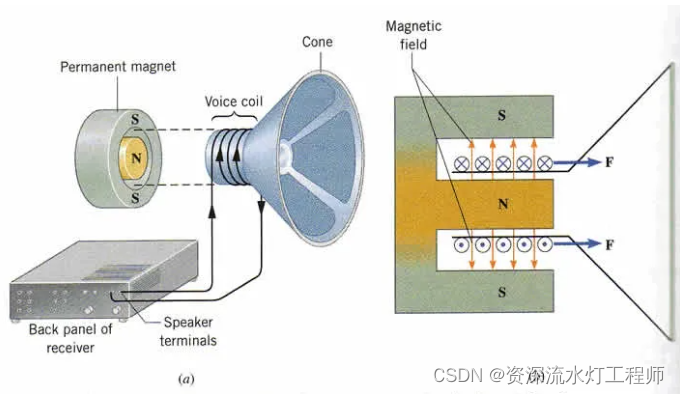
音圈用于扬声器的原理

通电时,音圈来回运动
2.音圈电机结构及原理
音圈电机的原理,和上面所说的一模一样:线圈在永磁场中通电受力,发生运动,只不过音圈电机线圈不连接在扩音部件上,而是连接在其他需要驱动的部件上。
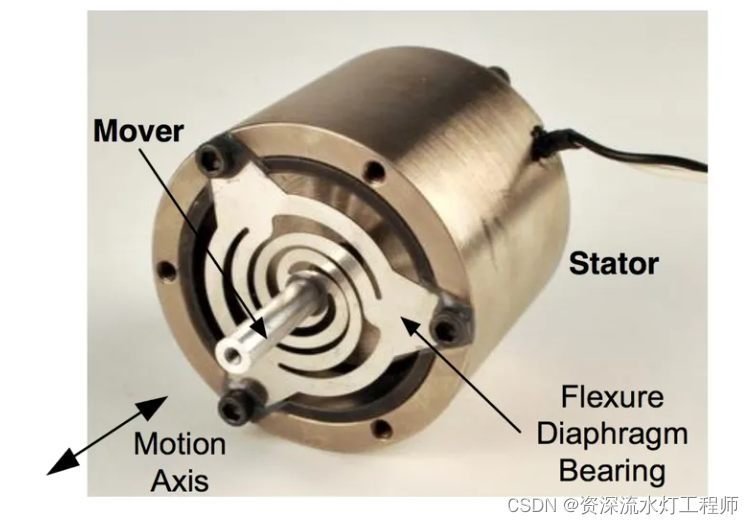
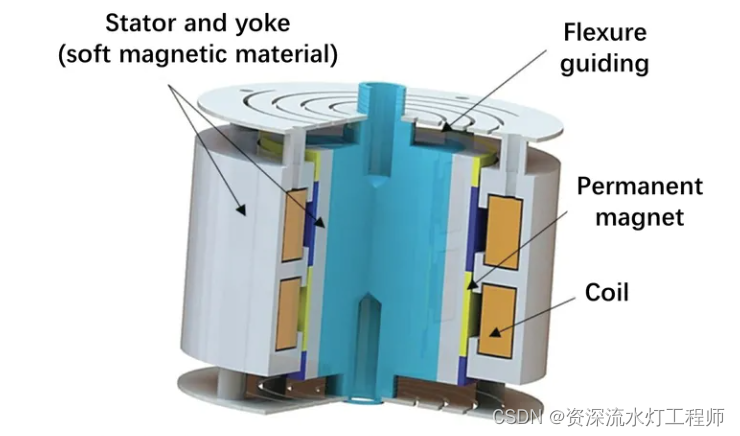
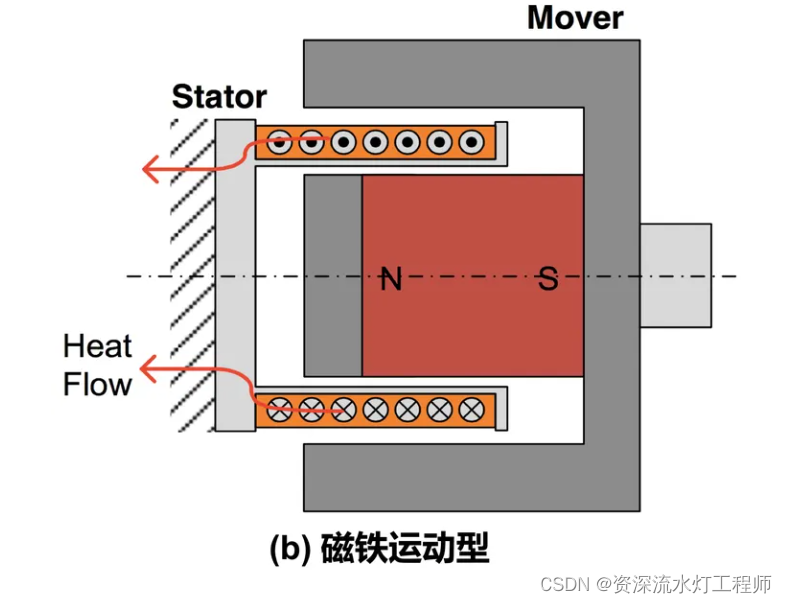
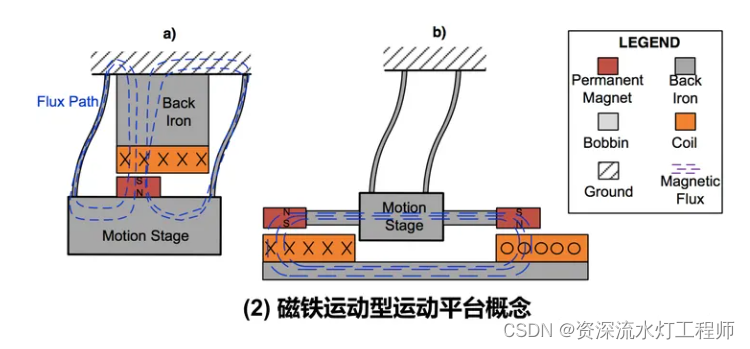
磁体运动式圆柱形音圈电机内部结构示意图:音圈固定,磁体和轴固连,轴两端有柔性导向结构,当线圈通电,线圈和磁铁之间会产生轴向力,带动轴运动。
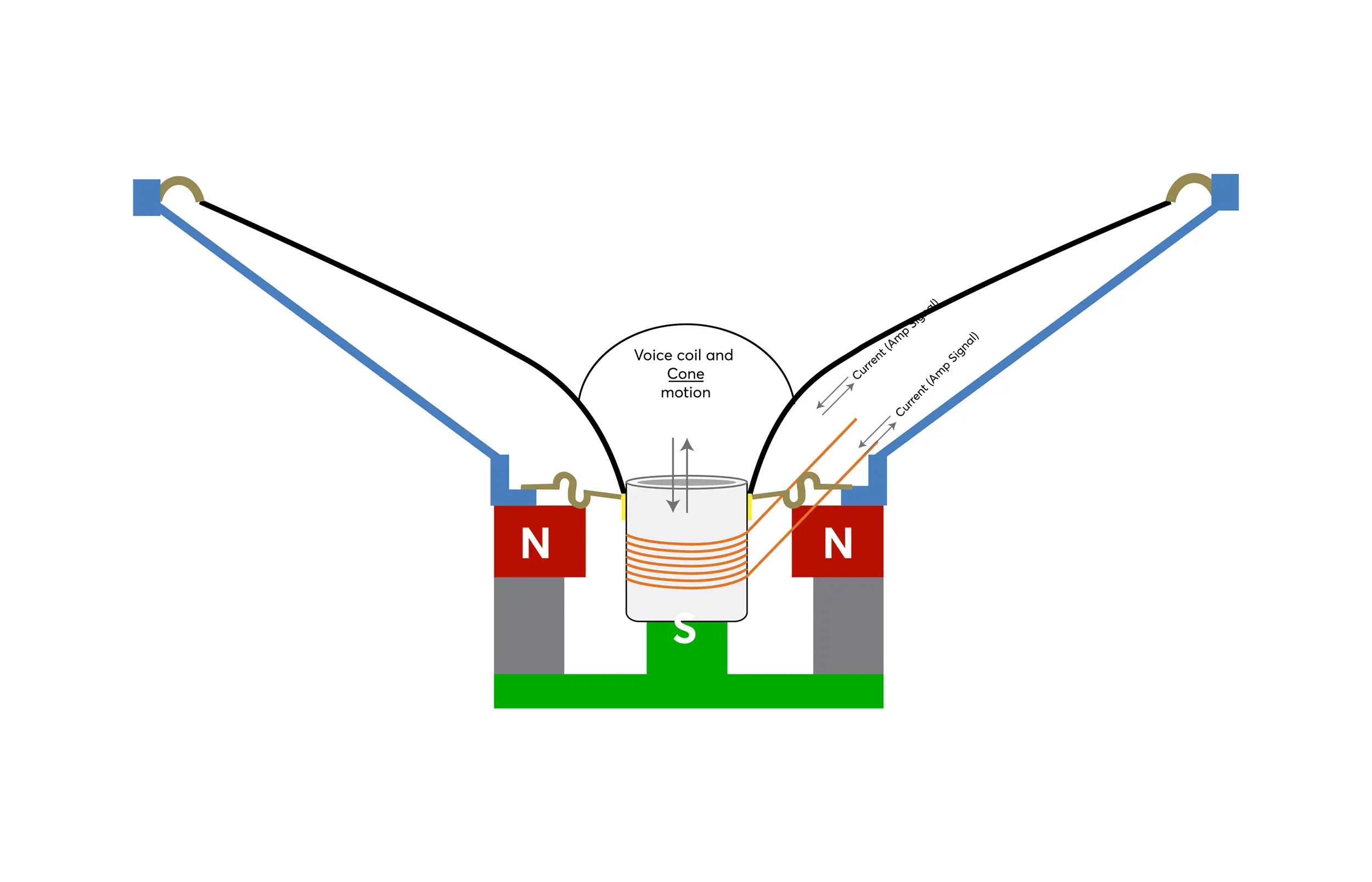
线圈运动式音圈电机剖视图,上方线圈电流垂直于屏幕向外,下方电流垂直于屏幕向里,磁场在缝隙中垂直于电流,使用左手定则(让磁感线穿过手心,四指指向电流方向,大拇指所指方向就是线圈受力方向),很容易知道线圈沿左右方向受力运动。
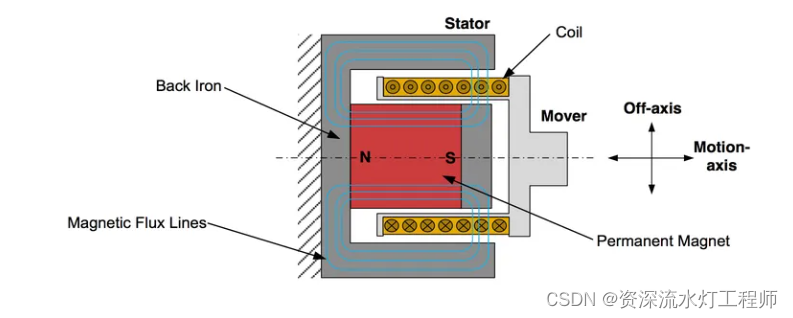
这张图和轴式直线电机何其相似,只需要把磁铁复制排列好并固定,然后把线圈释放,不就是轴式直线电机了吗。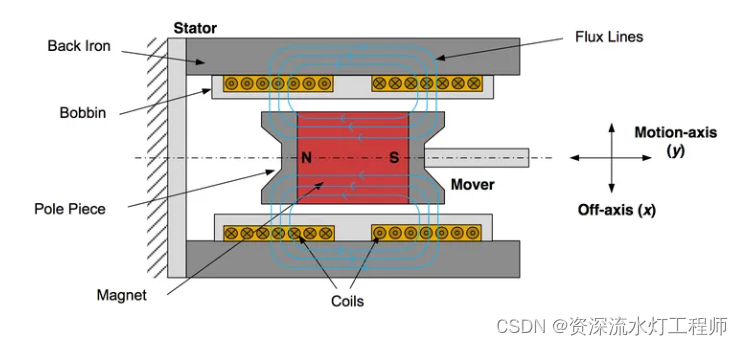
线圈受到的力称为洛伦兹力,由电流和磁通量的乘积确定:
F = k * B * L * I * N
其中,
F =力(N)
k =力常数
B =磁通密度(特斯拉)
L =线长(m)
I =电流(安培)
N =导体数量
对于给定的音圈,除电流外,所有参数都是固定的。因此,产生的力与输入电流成正比。力的方向既垂直于磁通量方向,又垂直于电流方向,改变电流方向会改变力的方向。
这就是音圈电机的原理。
其核心,还是通电线圈在磁场中受洛伦兹力。
在实际应用中,音圈产生的力推动负载,活动部件可以是线圈,也可以是磁体(力是相互的)。
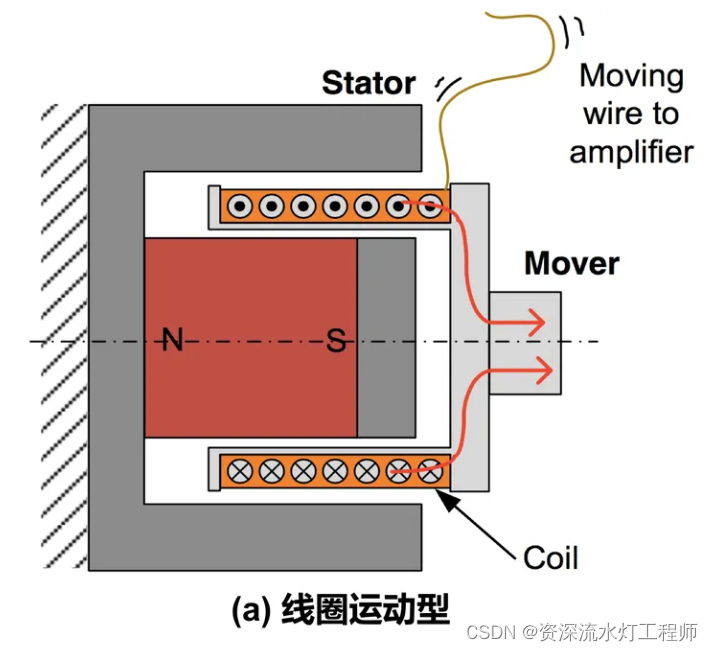
线圈运动比磁体运动质量低得多,可以驱动更高负载。
但是,线圈会产生热量,如果负载对温度波动敏感,那么使用磁体移动更好。
当然,作为一个完整的执行机构,音圈电机和直线电机一样,需要导向机构和位置反馈装置。
导向机构可以用柔性结构(一般用于微小运动),滑块式导轨,空气轴承,或者交叉滚子导轨等。
反馈设备,可以用光栅尺和读数头,也可以用LVDT位移传感器,霍尔传感器等。它们和伺服控制器,提供了一种闭环系统,可实现极其精确的位置和速度控制。
即使没有反馈装置,音圈电机也具有良好的力控制,这是因为其产生的力与施加的电流成正比。
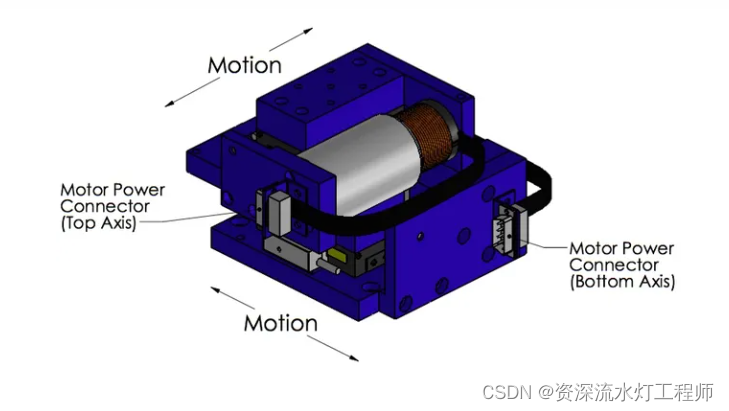
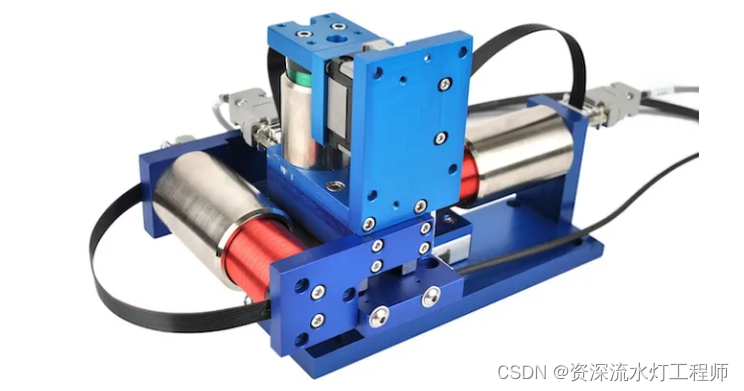
单轴及双轴音圈电机驱动平台,其中底部图片是双轴运动平台,且其最底层运动轴是双电机驱动。
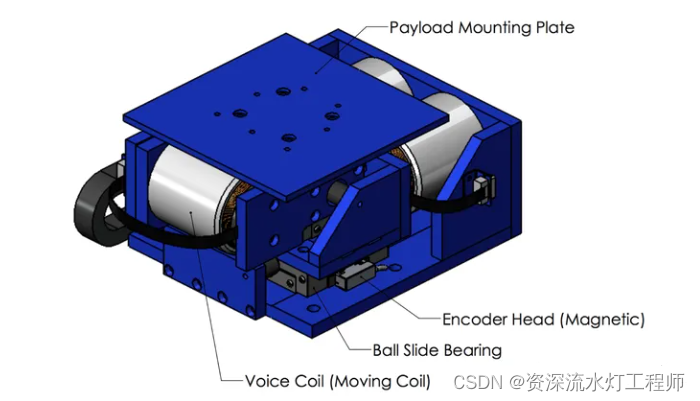
2轴音圈电机驱动平台
3轴音圈电机驱动平台
3. 音圈电机如何应用于镜头调焦?
我们再来仔细看看,音圈电机是如何用于镜头调焦的。
扁平形和圆柱形都看一下。
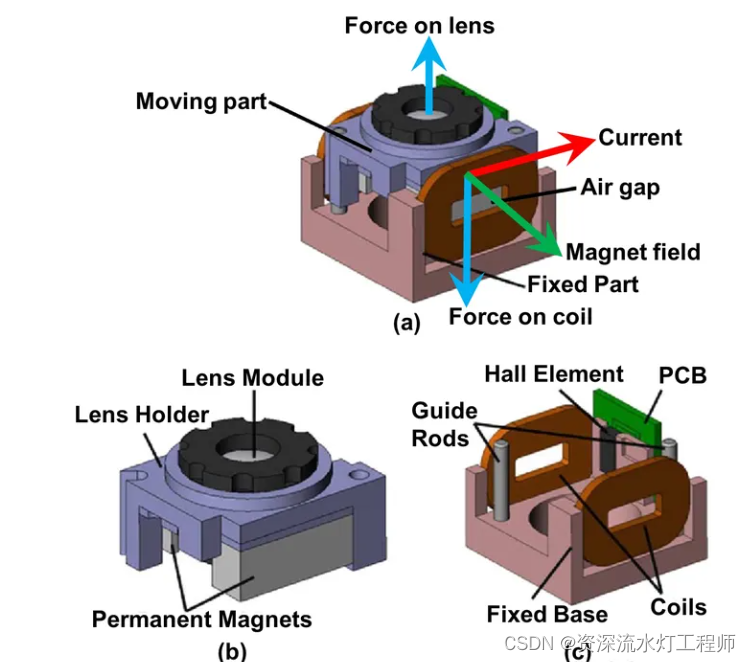
扁平式音圈电机,用于驱动微镜头调焦:如图(b)所示,镜头和永磁铁固定在镜架上,然后穿在图(c)对角线上两根导向杆中。如图(c),导向杆及线圈还有霍尔传感器固定在基座上,当线圈通电,便可驱动镜头上下运动,实现调焦。
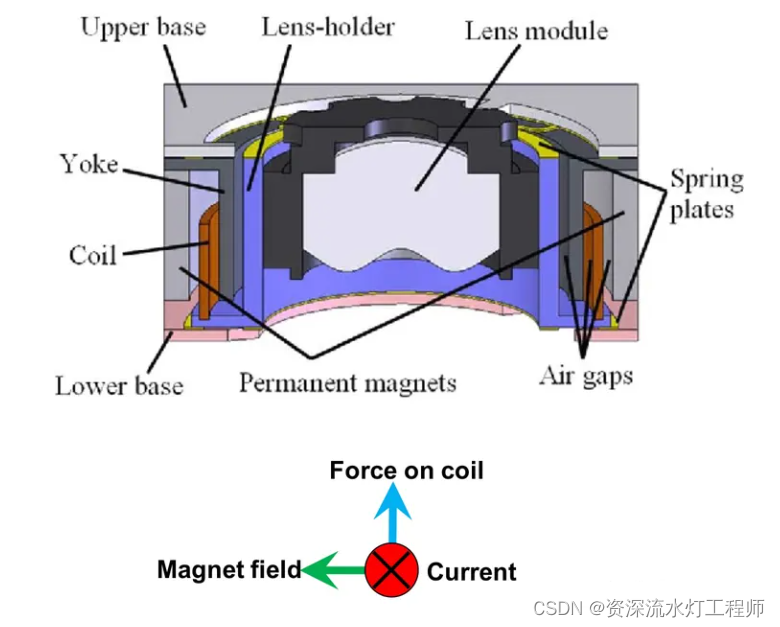
圆柱式音圈电机,驱动镜头上下运动,实现调焦:镜头和线圈固定在蓝色镜座上,顶部和底部有黄色的柔性导向结构,它们和镜座固连。柱形磁铁在外侧提供磁场,磁场辐射方向垂直于线圈,容易判断出线圈在上下方向受力,带动镜头运动,从而实现调焦。
到此,我们明白了音圈电机的工作原理。
正因为这个原理,音圈电机有如下的一些优点:无需换相,低至无迟滞,零齿槽,与“螺杆式”动力器相比,机械部件更少,线性控制特性,高功率质量比,高功率体积比,无限位置(仅受编码器限制),高加速度等。
所以音圈电机很适合于小位移直线运动,如果你的设计中有这个要求,不妨可以考虑一下使用音圈电机。
这篇关于运动控制:音圈电机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




