本文主要是介绍opencv 之 findcontours() 函数详解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
OpenCV中通过使用findContours函数,简单几个的步骤就可以检测出物体的轮廓,很方便。这些准备继续探讨一下
findContours方法中各参数的含义及用法,比如要求只检测最外层轮廓该怎么办?contours里边的数据结构是怎样
的?hierarchy到底是什么鬼?Point()有什么用?
先从findContours函数原型看起:
- findContours( InputOutputArray image, OutputArrayOfArrays contours,
- OutputArray hierarchy, int mode,
- int method, Point offset=Point());
第一个参数:image,单通道图像矩阵,可以是灰度图,但更常用的是二值图像,一般是经过Canny、拉普拉斯等边
缘检测算子处理过的二值图像;
第二个参数:contours,定义为“vector<vector<Point>> contours”,是一个向量,并且是一个双重向量,向量
内每个元素保存了一组由连续的Point点构成的点的集合的向量,每一组Point点集就是一个轮廓。
有多少轮廓,向量contours就有多少元素。
第三个参数:hierarchy,定义为“vector<Vec4i> hierarchy”,先来看一下Vec4i的定义:
typedef Vec<int, 4> Vec4i;
Vec4i是Vec<int,4>的别名,定义了一个“向量内每一个元素包含了4个int型变量”的向量。
所以从定义上看,hierarchy也是一个向量,向量内每个元素保存了一个包含4个int整型的数组。
向量hiararchy内的元素和轮廓向量contours内的元素是一一对应的,向量的容量相同。
hierarchy向量内每一个元素的4个int型变量——hierarchy[i][0] ~hierarchy[i][3],分别表示第
i个轮廓的后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号。如果当前轮廓没有对应的后一个
轮廓、前一个轮廓、父轮廓或内嵌轮廓的话,则hierarchy[i][0] ~hierarchy[i][3]的相应位被设置为
默认值-1。
第四个参数:int型的mode,定义轮廓的检索模式:
取值一:CV_RETR_EXTERNAL只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
取值二:CV_RETR_LIST 检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立等级关
系,彼此之间独立,没有等级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓,
所以hierarchy向量内所有元素的第3、第4个分量都会被置为-1,具体下文会讲到
取值三:CV_RETR_CCOMP 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围
内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
取值四:CV_RETR_TREE, 检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内
层轮廓还可以继续包含内嵌轮廓。
第五个参数:int型的method,定义轮廓的近似方法:
取值一:CV_CHAIN_APPROX_NONE 保存物体边界上所有连续的轮廓点到contours向量内
取值二:CV_CHAIN_APPROX_SIMPLE 仅保存轮廓的拐点信息,把所有轮廓拐点处的点保存入contours
向量内,拐点与拐点之间直线段上的信息点不予保留
取值三和四:CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近
似算法
第六个参数:Point偏移量,所有的轮廓信息相对于原始图像对应点的偏移量,相当于在每一个检测出的轮廓点上加
上该偏移量,并且Point还可以是负值!
下边用效果图对比一下findContours函数中各参数取不同值时,向量contours和hierarchy的内容如何变化,有何
异同。
主体程序如下:
- #include "core/core.hpp"
- #include "highgui/highgui.hpp"
- #include "imgproc/imgproc.hpp"
- #include "iostream"
- using namespace std;
- using namespace cv;
- int main(int argc,char *argv[])
- {
- Mat imageSource=imread(argv[1],0);
- imshow("Source Image",imageSource);
- Mat image;
- GaussianBlur(imageSource,image,Size(3,3),0);
- Canny(image,image,100,250);
- vector<vector<Point>> contours;
- vector<Vec4i> hierarchy;
- findContours(image,contours,hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE,Point());
- Mat imageContours=Mat::zeros(image.size(),CV_8UC1);
- Mat Contours=Mat::zeros(image.size(),CV_8UC1); //绘制
- for(int i=0;i<contours.size();i++)
- {
- //contours[i]代表的是第i个轮廓,contours[i].size()代表的是第i个轮廓上所有的像素点数
- for(int j=0;j<contours[i].size();j++)
- {
- //绘制出contours向量内所有的像素点
- Point P=Point(contours[i][j].x,contours[i][j].y);
- Contours.at<uchar>(P)=255;
- }
- //输出hierarchy向量内容
- char ch[256];
- sprintf(ch,"%d",i);
- string str=ch;
- cout<<"向量hierarchy的第" <<str<<" 个元素内容为:"<<endl<<hierarchy[i]<<endl<<endl;
- //绘制轮廓
- drawContours(imageContours,contours,i,Scalar(255),1,8,hierarchy);
- }
- imshow("Contours Image",imageContours); //轮廓
- imshow("Point of Contours",Contours); //向量contours内保存的所有轮廓点集
- waitKey(0);
- return 0;
- }
程序中所用原始图像如下:

通过调整第四个参数mode——轮廓的检索模式、第五个参数method——轮廓的近似方式和不同的偏移量Point(),就可以得到以下效果。
一、mode取值“CV_RETR_EXTERNAL”,method取值“CV_CHAIN_APPROX_NONE”,即只检测最外层轮廓,并且保存轮廓上所有点:
轮廓:
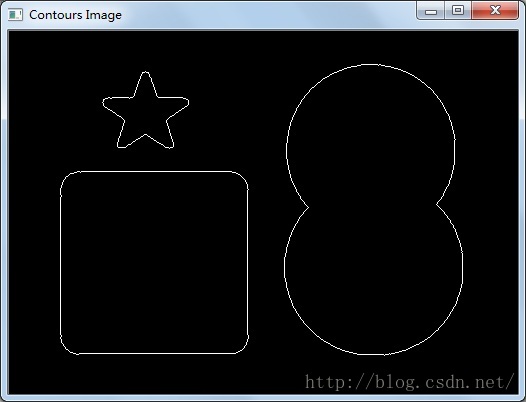
只有最外层的轮廓被检测到,内层的轮廓被忽略
contours向量内所有点集:
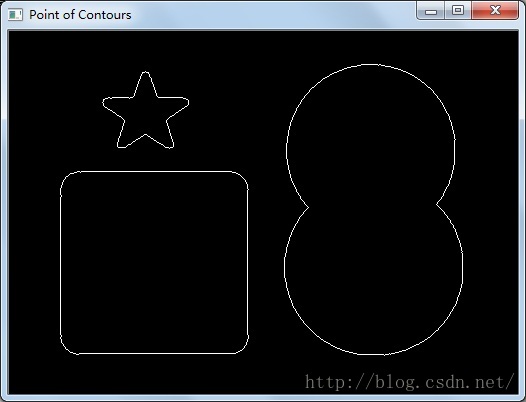
保存了所有轮廓上的所有点,图像表现跟轮廓一致
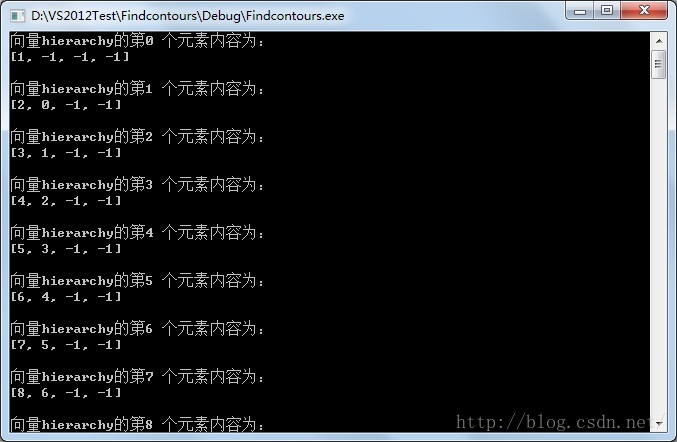
hierarchy向量:
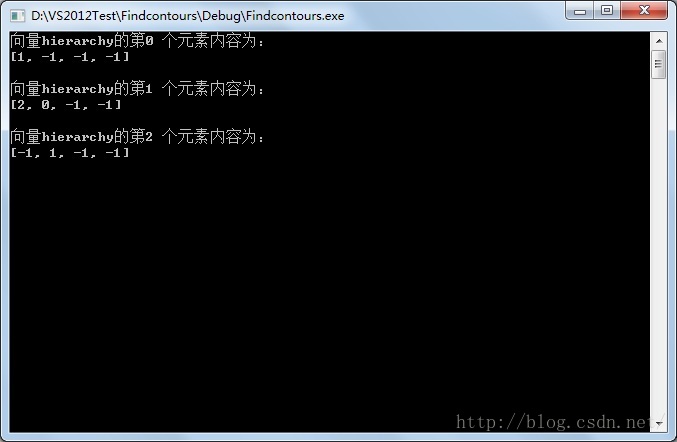
重温一下hierarchy向量————向量中每个元素的4个整形分别对应当前轮廓的后一个轮廓、前一个轮廓、父轮廓、内
嵌轮廓的索引编号。
本次参数配置下,hierarchy向量内有3个元素,分别对应于3个轮廓。以第2个轮廓(对应向量内第1个元素)为例,
内容为[2,0,-1,-1], “2”表示当前轮廓的后一个轮廓的编号为2,“0”表示当前轮廓的前一个轮廓编号为0,其后2
个“-1”表示为空,因为只有最外层轮廓这一个等级,所以不存在父轮廓和内嵌轮廓。
二、 mode取值“CV_RETR_LIST”,method取值“CV_CHAIN_APPROX_SIMPLE”,即检测所有轮廓,但各轮廓之间彼此独立,不建立等级关系,并且仅保存轮廓上拐点信息:
检测到的轮廓跟上文“一”中是一致的,不再显示。
contours向量内所有点集:
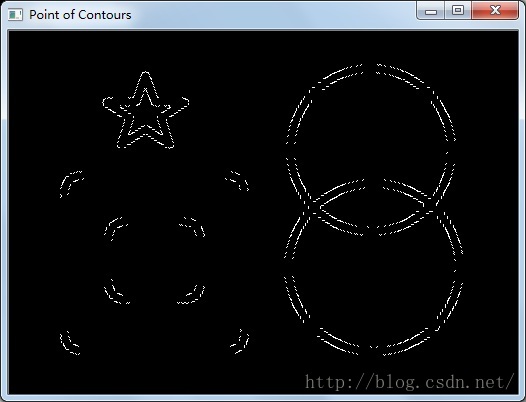
contours向量中所有的拐点信息得到了保留,但是拐点与拐点之间直线段的部分省略掉了。
hierarchy向量(截取一部分):
本次参数配置下,检测出了较多轮廓。第1、第2个整形值分别指向上一个和下一个轮廓编号,由于本次配置mode取
值“RETR_LIST”,各轮廓间各自独立,不建立等级关系,所以第3、第4个整形参数为空,设为值-1。
三、mode取值“CV_RETR_TREE”,method取值“CV_CHAIN_APPROX_NONE”,即检测所有轮廓,轮廓间建立外层、内层的等级关系,并且保存轮廓上所有点。
contours向量内所有点集:
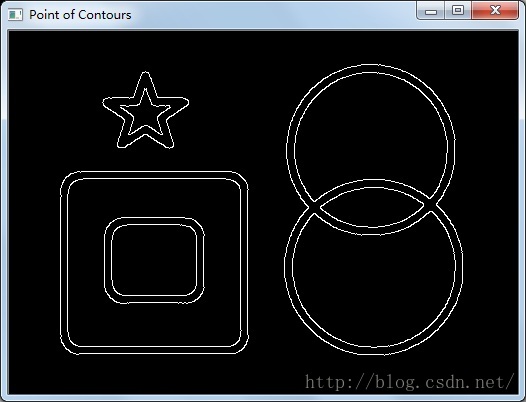
所有内外层轮廓都被检测到,contours点集组成的图形跟轮廓表现一致。
hierarchy向量(截取一部分)
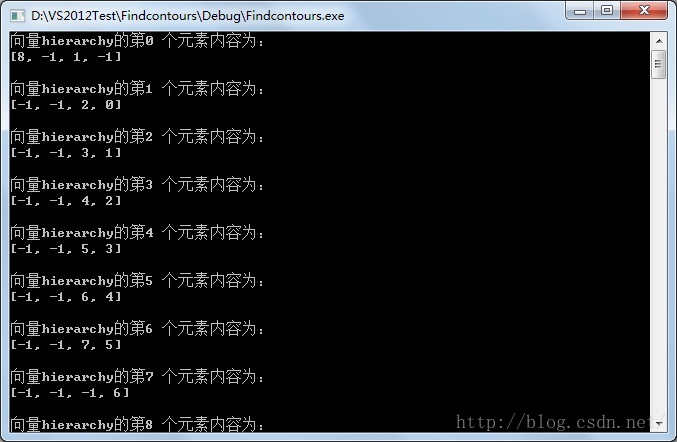
本次参数配置要求检测所有轮廓,每个轮廓都被划分等级,最外围、第一内围、第二内围等等,所以除第1个最后一
个轮廓外,其他轮廓都具有不为-1的第3、第4个整形参数,分别指向当前轮廓的父轮廓、内嵌轮廓索引编号。
四、Point()偏移量设置
使用三中的参数配置,设置偏移量Point为Point(45,30)。
此时轮廓图像为:
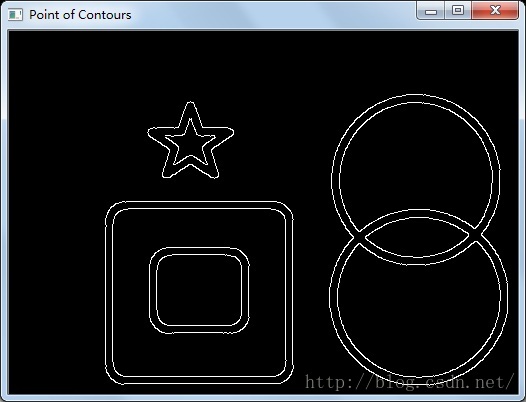
可以看到轮廓图像整体向右下角有一个偏转,偏转量就是设置的(45,30)。
这个偏移量的设置不能过大或过小(负方向上的过小),若图像上任一点加上该偏移量后超出图像边界,程序会内存
溢出报错。
findContours函数的各参数就探讨到此,其他参数配置的情况大同小异。值得关注一下的是绘制轮廓的函数
drawContours中最后一个参数是一个Point类型的offset,这个offset跟findContours函数中的offset含义一致,设置之
后所绘制的轮廓是原始轮廓上所有像素点加上该偏移量offset后的效果。
当所分析图像是另外一个图像的ROI的时候,这个offset偏移量就可以大显身手了。通过加减这个偏移量,就可以把
ROI图像的检测结果投影到原始图像对应位置上。
这篇关于opencv 之 findcontours() 函数详解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






