本文主要是介绍机器视觉入门之路(六十,神奇的线图像第五变,找圆工具匹配识别实现),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
先看一幅图:

这本是一幅2448*2048(W*H)的图像,而我只截取了其下半截,这里边有近似圆的东西(岳云的铜锤),我们怎么找到它呢?是的,眼睛已经搞定,但是计算机还搞不定,我们如何让视觉与计算心照不宣?
首先,使用我们的找圆工具学习(learning):
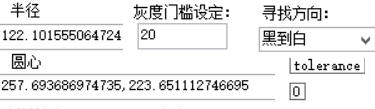
a,截取感兴趣区域;b,使用找圆工具找到圆心和半径以及其他。


第二幅图怎么变成黑白图了?是的,图像进行了二值化,大于灰度100,全为255白,否则,为0黑。然后,把我们的找圆工具拖上去,调整,穿越点全部跳出来了。(线工具的功劳!)好,拟合圆,下面显示了结果和使用到的参数:
 以上是我们学习(learning)到的条件,够了吗?还缺什么?有什么不足?不知道!好,我们先捋一捋如何匹配:
以上是我们学习(learning)到的条件,够了吗?还缺什么?有什么不足?不知道!好,我们先捋一捋如何匹配:
1,整图以灰度100为门槛,二值化。2,让找圆工具在二值化整图中从左到右,从上到下依次比对穿越点及其拟合得到的半径。
3,直到比对成功。是的,最关键是第二步,找圆工具画500万次,拟合圆计算500万次,我的个神啊!测试后,电脑不动了,显然是挂了。我们能否只比对圆上线段内白(起点,终点)外黑?或者部分线段?或者部分计算?不需要画出找圆工具?是的,是这样,改进第二步如下:
a,因为有半径,所以要避开w-2*半径,h-2*半径区域。
b,因为计算机查找的速度远远大于计算的速度,所以要利用圆上线段(线图像起终点)相对圆心是固定不变的特性。
c,舍去圆上0246区域,只使用1357区域的圆上线图像。(64(8*8)条线图像,考察32(4*8)条)
d,不再二值化整图中画找圆工具。
e,取1357区域的10条连续线图像计算其穿越点与圆心关系,限定3个单位误差。
测试后效果出来了,大概2s,为了进一步扩大战果:再改进如下:
a,1357区域只考察16(4*4)条线图像,四个区域,每个区域8条线图像只取4条。
b,因为圆上有缺口,即线图像无穿越点,返回(0,0),在16(4*4)条线图像中要排除掉。
c,不足16条线,任意两条线的终点为黑,圆心为白,优先筛选。其次找5条连续线图像计算其穿越点与圆心关系,限定2.5个单位误差。
d,找出缺口方向。
实现后测试,进入500ms级。另外发现,图像二值化后,门槛值20失效了。现在回头,就知道我们 来时学习(learning)到了什么条件。 更新outer是需要的线图像终点,更新inner是需要的线图像起始点,更新关键点是第一线图像终点及最后一个线图像终点,关键缺口方向在64个穿越点中找出。下面贴出结果和代码:
更新outer是需要的线图像终点,更新inner是需要的线图像起始点,更新关键点是第一线图像终点及最后一个线图像终点,关键缺口方向在64个穿越点中找出。下面贴出结果和代码:
第一步,加载关键点:
int binthreshold = Convert.ToInt32(textBoxBIN.Text);
//此处判断黑白
if (((int)圆半径) == 0) return;
string str1 = textBox1关键匹配点.Lines[0];
char[] separator = { ',' };
string[] splitstr1 = new string[2];
splitstr1 = str1.Split(separator);
Point temp1 = new Point((Convert.ToInt16(splitstr1[0])),
(Convert.ToInt16(splitstr1[1])));
str1 = textBox1关键匹配点.Lines[1];//
splitstr1 = str1.Split(separator);
Point temp2 = new Point((Convert.ToInt16(splitstr1[0])),
(Convert.ToInt16(splitstr1[1])));
第二步:整图二值化:
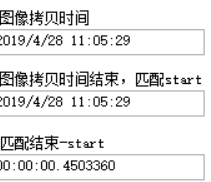
textBox3.Text = DateTime.Now.ToString();
/
globclonebuff = new byte[2048 * 2448];
for (int i = 0; i < 2048; i++)
for (int j = 0; j < 2448; j++)
{
int instead = i * 2448 + j;
globclonebuff[instead] = (glob_buffer8[instead] >= (byte)binthreshold ? (byte)255 : (byte)0);
}
DateTime dt=DateTime.Now;
textBox1.Text = dt.ToString();
PointF recordPt = new PointF();
int thres = Convert.ToInt32(tbThresforCirle.Text);
int CirR = (int)(gaugeCir.m_cirRoi.m_RoiCircle.m_Radius + gaugeCir.m_cirRoi.m_RoiCircle.m_tolerance +
15 + 2);
if (圆内点.Count == 0) return;
第三步:循环中优先考察关键点和圆心匹配:
for (int h = CirR; h < 2048 - CirR; h++)//活动范围0+r,2048-r//
{
for (int w = CirR; w < 2448 - CirR; w++)
{//拖动circlecaliper,重置他的位置
gaugeCir.m_cirRoi.m_RoiCircle.Drag(new PointF(w, h));//此处默认为255白
Point outpoint1 = new Point(); Point outpoint2 = new Point();
outpoint1.X = temp1.X - (int)(圆心x + 0.5) + w;
outpoint1.Y = temp1.Y - (int)(圆心y + 0.5) + h;
outpoint2.X = temp2.X - (int)(圆心x + 0.5) + w;
outpoint2.Y = temp2.Y - (int)(圆心y + 0.5) + h;
// int getval1 = (int)(globclonebuff[outpoint1.X + outpoint1.Y * 2448]) / 255;
int getval1 = (int)globclonebuff[outpoint1.X + outpoint1.Y * 2448] == 0 ? 0 : 1;
// int getval2 = (int)(globclonebuff[outpoint2.X + outpoint2.Y * 2448]) / 255;
int getval2 = (int)globclonebuff[outpoint2.X + outpoint2.Y * 2448] == 0 ? 0 : 1;
// int getval3 = Math.Abs((int)(globclonebuff[w + h * 2448]) / 255 - 1);//为255白=1
int getval3 = (int)globclonebuff[w + h * 2448] == 0 ? 1 : 0;
if (gb_dirCirle == getval1 &&//默认dir=0为黑
gb_dirCirle == getval2 && gb_dirCirle == getval3)//请考虑方向变化后dir
{
第四步:考察连续5个穿越点与圆心关系:
int jishuqi = 0;//圆内点和圆外点一一对应,为一线图像
PointF[] 圆内点1 = 圆内点.ToArray();//更新inner
PointF[] 圆外点1 = 圆外点.ToArray();//更新outer
// 求新内外点(ref 圆内点1, ref 圆外点1, w, h);
int telen = 圆内点1.GetLength(0);
for (int i = 0; i < telen; i++)
{
圆内点1[i].X = (float)(圆内点1[i].X - 圆心x + w);
圆内点1[i].Y = (float)(圆内点1[i].Y - 圆心y + h);
圆外点1[i].X = (float)(圆外点1[i].X - 圆心x + w);
圆外点1[i].Y = (float)(圆外点1[i].Y - 圆心y + h);
}
//直接调用函数ver2第三步
PointF[] BackResult = new PointF[telen];//
for (int i = 0; i < telen; i++)
{
PointF startxy = 圆内点1[i];
PointF endxy = 圆外点1[i];
if (startxy.X < 0 || startxy.X > 2448 - 1 ||
startxy.Y < 0 || startxy.Y > 2048 - 1 ||
endxy.X < 0 || endxy.X > 2448 - 1 ||
endxy.Y < 0 || endxy.Y > 2048 - 1) continue;
BackResult[i] = gaugeCir.DdaFindPtImprove(ref globclonebuff, 圆内点1[i], 圆外点1[i],
//thres, gb_dirCirle, new Size(2448, 2048));
//binthreshold
binthreshold, gb_dirCirle, new Size(2448, 2048));
//if (BackResult[i].X != 0 && BackResult[i].Y != 0)
//{
//jishuqi++;
float deltaX = (BackResult[i].X - w);
float deltaY=(BackResult[i].Y - h);
if (Math.Abs(Math.Sqrt(deltaX * deltaX +
deltaY * deltaY) - 圆半径) < 2.5)
{
jishuqi++; if (jishuqi >= 5) break;
}
else { i = telen; }
// }
}
if (jishuqi >= 5) //1357应该有32个样本点,此处使用16//考察5个201903291031
{
globMatchCirPt.X = w;
globMatchCirPt.Y = h;
h = 2048; w = 2448;
}
}
}} textBox2.Text = (DateTime.Now-dt).ToString();
gaugeCir.m_cirRoi.m_RoiCircle.Drag(new PointF((float)圆心x, (float)圆心y));//此处默认为255白
pictureBox1.Invalidate();
Ok,结束,以下是在core m-5y10c的结果:
 找圆工具以点带面进行匹配尝试,还不成熟,才实现一个月,肯定有不足,望指正;其实找线工具也可以匹配,有兴趣可以一试。
找圆工具以点带面进行匹配尝试,还不成熟,才实现一个月,肯定有不足,望指正;其实找线工具也可以匹配,有兴趣可以一试。
(待续..........................)
我的邮箱liuganggang_1978@163.com;734523623@qq.com
这篇关于机器视觉入门之路(六十,神奇的线图像第五变,找圆工具匹配识别实现)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







