本文主要是介绍反馈时延与端到端拥塞控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
先从 越来越无效的拥塞控制 获得一个直感。
开局一张图,剩下全靠编。这是一道习题:

这图来自《高性能通信网络(第二版)》,2002 年的书,很好很高尚,目前这种书不多了。不准备做这道题,但意思要明白,时延越大越不同,系统越震荡,甚至跑飞不稳定,这个道理也可以从相轨迹看出。首先,先看经典的 aimd 收敛图是如何获得的。
aimd 系统的微分方程如下:
d W d t = ( 1 − p ) ∗ a W − p ∗ b ∗ W \dfrac{dW}{dt}=(1-p)*\dfrac{a}{W}-p*b*W dtdW=(1−p)∗Wa−p∗b∗W
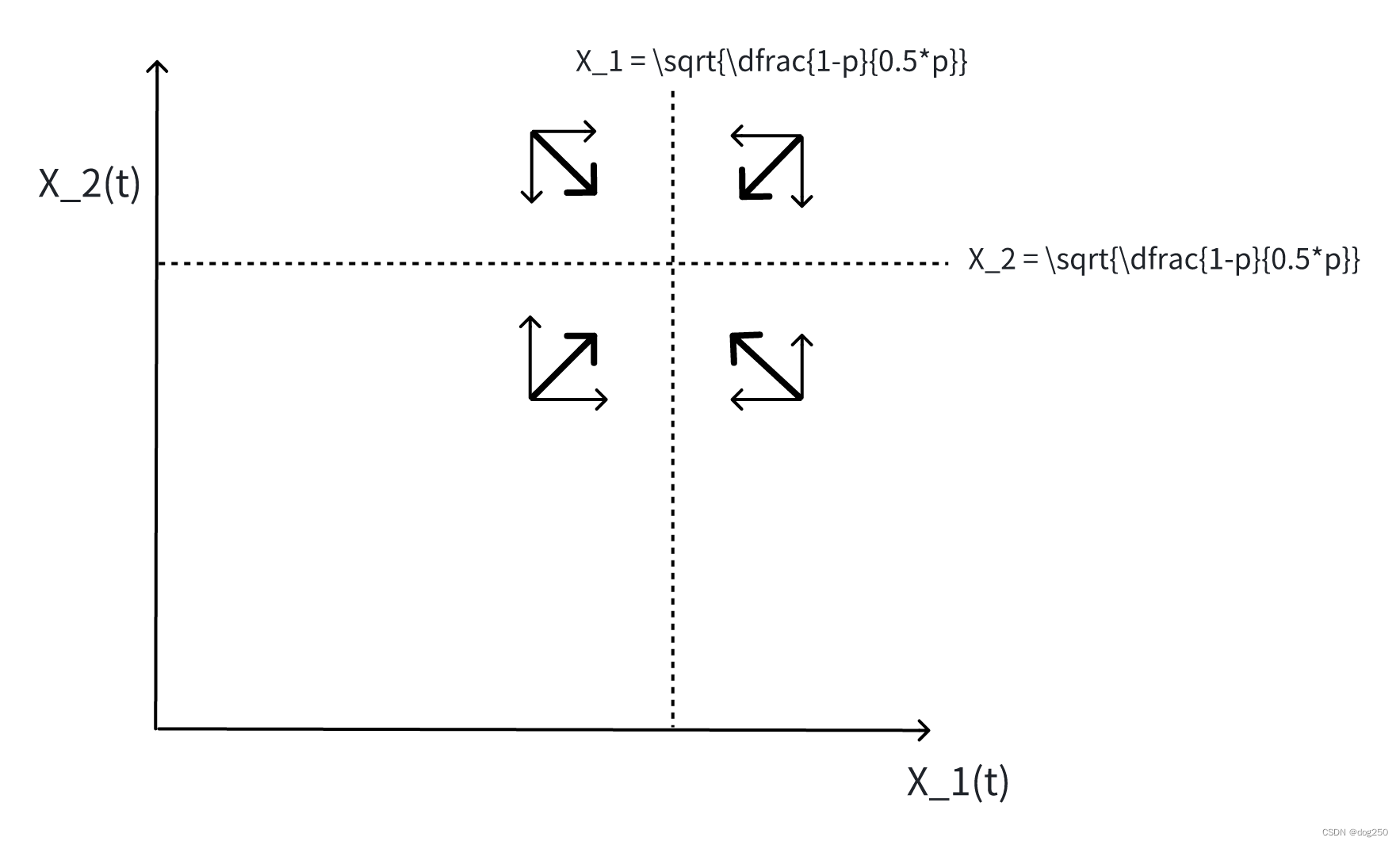
系统会稳定在 ( 1 − p ) ∗ a W = p ∗ b ∗ W (1-p)*\dfrac{a}{W}=p*b*W (1−p)∗Wa=p∗b∗W 处,p 由 buffer 决定,解得 W 为一定值,相平面空间如下:
然而若引入一个时滞,即 W ( t ) W(t) W(t)代换为 W ( t − τ ) W(t-\tau) W(t−τ),相轨迹就没有这么简单了,大概的意思会变成下面这样:
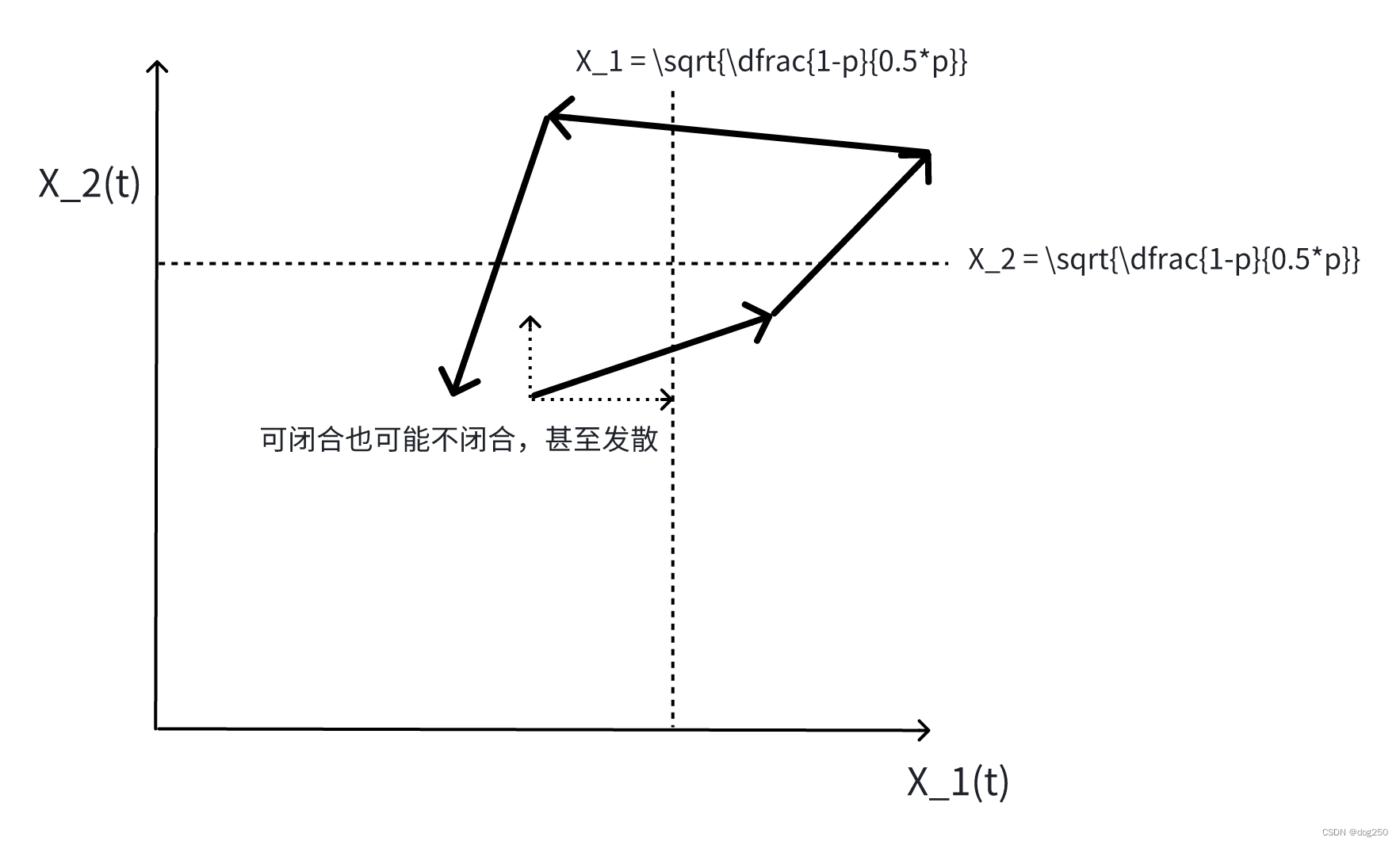
没有时延时,系统的稳定性由 df(x,t)/dt 的符号决定,引入时延后,平衡点的稳定性分析变得更为复杂,需要考虑时延对 f(x,t) 的影响。
时延会导致系统响应滞后。这意味着系统在给定输入的情况下,响应的速度会减慢或产生振荡,这种效应在非线性系统和复杂系统中尤为显著,直接命中网络传输。
简单通俗来讲,rtt 过大时,当 sender 接收到拥塞信号时,拥塞可能已经解除或已经进入第 n 次完全不同的拥塞状态,亦或相反,拥塞状态已经病入膏肓,信号仍未到达 sender,导致持续注入流量加剧拥塞,崩溃是可能的,虽能恢复,但恢复期受震荡周期影响,而震荡周期一般又与反馈时延正相关。
稍微正式一点说,反馈时延过大对控制系统的影响主要体现在系统的稳定性和性能上,基于微分方程分析相轨迹还是太复杂,正规方式是基于系统传递函数分析(涉及拉普拉斯变换)。
控制系统中,传递函数描述输入信号和输出信号之间关系。当反馈时延存在时,系统传递函数会受到影响。假设无时延时系统的传递函数为 G(s),有时延后的传递函数 G_d(s) 可表示为:
G d ( s ) = G ( s ) e − τ s G_d(s) = G(s)e^{-\tau s} Gd(s)=G(s)e−τs
这里的 e^{-\tau s} 改变了系统的频率响应和相位特性,影响了系统的稳定性和响应速度。时延会在所有频率上引入一个线性相位滞后,同时,增益曲线也会在高频段出现衰减。
时延的存在还会使根轨迹发生变化,可能导致闭环极点向复平面的不稳定区域移动,从而影响系统的稳定性。
反馈时延还直接影响系统的动态响应,包括上升时间和调整时间。时延越大,系统的响应越慢,动态性能恶化,对干扰和噪声的敏感度增加,这在实时控制和需要快速响应的应用场景中尤其重要。
一个小小的反馈时延,一下子就将一个准线性系统或准一阶,二阶线性系统变成了非线性复杂系统,加上一个时滞就让你无法再用分离变量等方法处理微分方程,更无法在相平面空间施展拳脚(我自信善于此),从而不得不上传递函数工具,陷入更复杂的数学分析。
我为什么总是反对端到端精确测量,背后就是这个。我强调快速收敛规则而不是精确测量,重点在快速,以确保不会拥塞崩溃,或崩溃后尽快恢复。因此,我在 inflight 守恒算法中强调只保持 “一点点” 对 buffer 的占用,以获得动态性和感知敏感性,我并不觉得过度侵占资源可以获得更高性能或资源利用率,因为整体来看,这种方法代价巨大,即遍从自私的视角来看也是如此,越过 E_best 后,事实上你已经没有收益了。相反,E_best 本身就决定了 buffer 不会占太多。
反思我昨天的 PID 加持 inflight 守恒算法,依然没有占据过多 buffer,但我在 “快速响应” 方面冒了险,还好 PID 还有调参的艺术,效果如何,试试看咯。
进一步反思 aimd,长肥管道 cwnd 恢复慢,大概就是本文所论述的内秉属性,如果想快速恢复,势必会被另一种代价击中另一个软肋。
so aimd-based?大致都是一回事,bbr 就算了,最终它也还是叶落归根。
最后,转发个有趣的:中国移动完成全球最长距离数据快递广域高吞吐技术验证。
浙江温州皮鞋湿,下雨进水不会胖。
这篇关于反馈时延与端到端拥塞控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




