本文主要是介绍富唯智能打造的AGV搬运机器人转运机器人,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
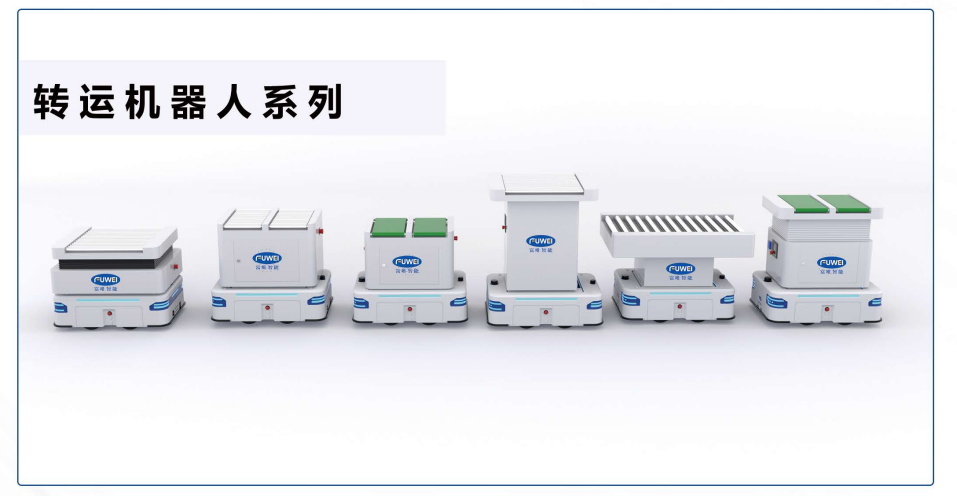
AGV搬运机器人&转运机器人
AGV搬运机器人,内部搭载ICD系列核心控制器,拥有不同的移载平台,负载最高可达 1000kq;重复精度高达±5mm;支持 Wi-Fi漫游,实现更稳健的网络数据交互;无轨化激光 SLAM 导航,配合 3D 避障相机等多传感器进行安全防护。转运器人可实现货物在指定地点之间进行灵活搬运,如电商分拣、物料转运、呼叫送料等环节,解放人力,实现无人化运输。
应用场景:
转运机器人可以实现不同场景料箱、物料等转运工作,解放人力,实现无人化运输。可以应用在汽车、新能源、电子、机加工、物流、食品与饮料、生命科学等行业。

这篇关于富唯智能打造的AGV搬运机器人转运机器人的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








