本文主要是介绍七、(正点原子)Linux并发与竞争,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Linux是多任务操作系统,肯定会存在多个任务共同操作同一段内存或者设备的情况,多个任务甚至中断都能访问的资源叫做共享资源。在驱动开发中要注意对共享资源的保护,也就是要处理对共享资源的并发访问。
一、并发与竞争
1、简介
并发就是多个“用户”同时访问同一个共享资源,带来的问题就是竞争问题。Linux 系统是个多任务操作系统,会存在多个任务同时访问同一片内存区域,这些任务可能会相互覆盖这段内存中的数据,造成内存数据混乱。针对这个问题必须要做处理,严重的话可能会导致系统崩溃。现在的 Linux 系统并发产生的原因很复杂,总结一下有下面几个主要原因:
- 多线程并发访问
- 抢占式并发访问
- 中断程序并发访问
- SMP(多核)间并发访问
举一个简单的例子:比如说C语言中 a = 3 这样一句代码,它编译时候其实不是一句代码,而是编译成汇编的3句代码:
1 ldr r0, =0X30000000 /* 变量 a 地址 */
2 ldr r1, = 3 /* 要写入的值 */
3 str r1, [r0] /* 将 3 写入到 a 变量中 */比如正在执行上面的第二条语句时候,这个时候被其他任务打断,CPU被其他任务占用而且这个任务也是给一个变量赋值 b = 5 那么当这个任务运行到第二步时又被前面 a = 3 的任务打断,那么此时 r1 寄存器的值保存的就不是 3 而是 5 导致出现错误。
2、保护的内容是什么
并发是同时访问一个共享资源,那么共享资源是什么呢?说简单一点,共享资源其实就是数据,比如一个全局变量等等,所以找到要保护的数据才是重点,一般像全局变量,设备结构体这些肯定是必须保护的对象,其他的数据就要根据实际的驱动而定。
二、原子操作
1、简介
原子在化学中是最小的组成,不可再往下分,所以,原子操作就是指不可以再进一步分割的操作,一般原子操作用于变量或位操作。Linux内核提供了两组API函数,一组是对整型(int)变量进行操作,一组是对位进性操作。
- 整型原子操作API
Linux内核定义了叫 atomic_t 的结构体来完成整型数据的原子操作,使用原子变量来代替整型变量。定义在 include/linux/types.h中:

2、原子操作API函数
要使用原子操作API函数(定义在include/asm/atomic.h),首先要定义一个atomic_t的原子变量。
| 函数 | 描述 |
|---|---|
| ATOMIC_INIT(int i) | 定义原子变量并初始化 |
| int atomic_read(atomic_t *v) | 读取v的值,并返回 |
| void atomic_set(atomic_t *v, int i) | 给v写入i值 |
| void atomic_add(int i,atomic_t *v) | 给v加上i值 |
| void atomic_sub(int i,atomic_t *v) | 给v减去i值 |
| void atomic_inc(atomic_t *v) | v自增1 |
| void atomic_dec(atomic_t *v) | v自减1 |
| int atomic_inc_return(atomic_t *v) | v自增1,并返回v的值 |
| int atomic_dec_return(atomic_t *v) | v自减1,并返回v的值 |
| int atomic_inc_and_test(atomic_t *v) | v自增1,如果v==0返回真,否者返回假 |
| int atomic_dec_and_test(atomic_t *v) | v自减1,如果v==0返回真,否者返回假 |
| int atomic_sub_and_test(int i,atomic_t *v) | v减i值,如果v==0返回真,否者返回假 |
| int atomic_add_negative(int i,atomic_t *v) | v加i值,如果v为负返回真,否者返回假 |
如果使用的时64位的SOC的话,要使用到64位的原子变量:
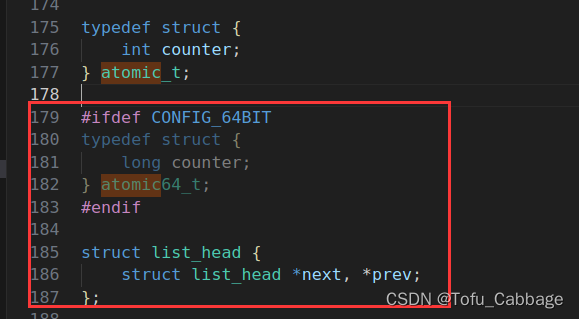
相应的API函数也是一样,将“atomic_”换位“atomic64_”。将“int”换为“long long”。
- 原子位操作API
位操作也就是将对应的位置1或清零这样的操作。Linux 内核也提供了一系列的原子位操作 API 函数,只不过原子位操作不像原子整形变量那样有个 atomic_t 的数据结构,原子位操作是直接对内存进行操作,API 函数(定义在include/asm/bitops.h):
| 函数 | 描述 |
|---|---|
| void set_bit(int nr, void *p) | 将p地址的第nr位置1 |
| void clear_bit(int nr, void *p) | pps将p地址的第nr位清零 |
| void change_bit(int nr, void *p) | 将p地址的第nr位翻转 |
| int test_bit(int nr, void *p) | 获取p地址的第nr位的值。 |
| int test_and_set_bit(int nr, void *p) | 获取p地址的nr位并将该位置1,返回nr位原来的值 |
| int test_and_clear_bit(int nr, void *p) | 获取p地址的nr位并将该位清零,返回nr位原来的值 |
| int test_and_change_bit(int nr, void *p) | 获取p地址的nr位并将该位翻转,返回nr位原来的值 |
三、自旋锁
1、简介
原子操作只能对整形变量或者位进行保护,但是,在实际的使用环境中不可能只有整形变量或位这么简单的临界区(代码保护区)。举个最简单的例子,设备结构体变量就不是整型变量,我们对于结构体中成员变量的操作也要保证原子性,在线程 A 对结构体变量使用期间,应该禁止其他的线程来访问此结构体变量,这些工作原子操作都不能胜任,需要本节要讲的锁机制,在 Linux内核中就是自旋锁。
当一个线程要访问某个共享资源的时候首先要先获取相应的锁, 锁只能被一个线程持有,只要此线程不释放持有的锁,那么其他的线程就不能获取此锁。对于自旋锁而言,如果自旋锁正在被线程 A 持有,线程 B 想要获取自旋锁,那么线程 B 就会处于忙循环-旋转-等待状态,线程 B 不会进入休眠状态或者说去做其他的处理,而是会一直傻傻的在那里“转圈圈”的等待锁可用。
自旋锁的“自旋”也就是“原地打转”的意思,“原地打转”的目的是为了等待自旋锁可以用,可以访问共享资源。把自旋锁比作一个变量 a,变量 a=1 的时候表示共享资源可用,当 a=0的时候表示共享资源不可用。现在线程 A 要访问共享资源,发现 a=0(自旋锁被其他线程持有),那么线程 A 就会不断的查询 a 的值,直到 a=1。从这里我们可以看到自旋锁的一个缺点:那就等待自旋锁的线程会一直处于自旋状态,这样会浪费处理器时间,降低系统性能,所以自旋锁的持有时间不能太长。
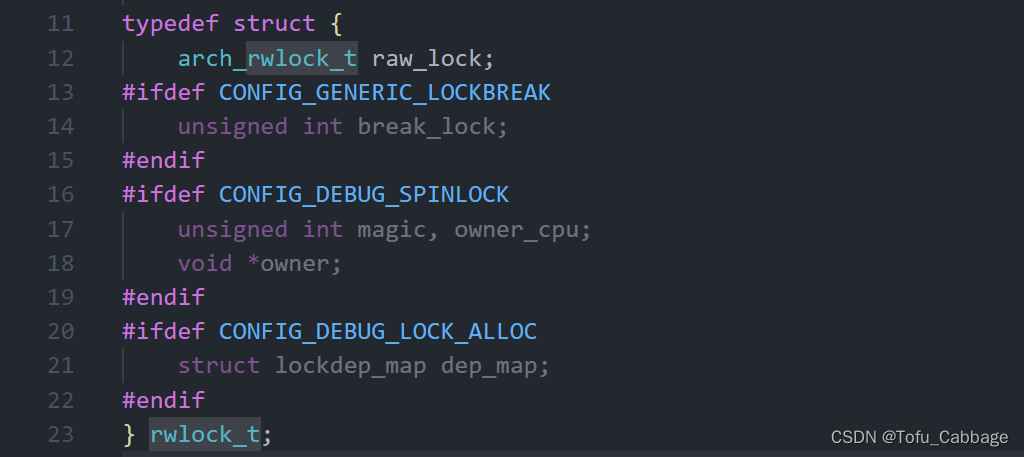
Linux内核使用结构体spinlock_t表示自旋锁,在linux/spinlock_types.h中定义:

在使用自旋锁之前,要先定义一个自旋锁变量,然后可以使用相应的API函数(定义在include/linux/spinlock.h)来操作自旋锁。
2、自旋锁API函数
| 函数 | 描述 |
|---|---|
| DEFINE_SPINLOCK(spinlock_t lock) | 定义并初始化一个自旋锁变量 |
| int spin_lock_init(spinlock_t *lock) | 初始化自旋锁 |
| void spin_lock(spinlock_t *lock) | 加锁 |
| void spin_unlock(spinlock_t *lock) | 解锁 |
| int spin_trylock(spinlock_t *lock) | 加锁,如果加锁失败返回0 |
| int spin_is_locked(spinlock_t *lock) | 检查lock是否被获取,如果没有被获取返回非0,否则返回0 |
自旋锁API适用于SMP(多核)或单CPU支持抢占的线程之间的并发访问,中断中也可以使用自旋锁,但是在中断里面使用自旋锁的时候,在获取锁之前一定要先禁止本地中断(也就是本 CPU 中断,对于多核 SOC来说会有多个 CPU 核),否则可能导致锁死现象的发生。被自旋锁保护的临界区一定不能调用任何能够引起睡眠和阻塞的API 函数,否则的话会可能会导致死锁现象的发生自旋锁会自动禁止抢占,也就说当线程 A得到锁以后会暂时禁止内核抢占。如果线程 A 在持有锁期间进入了休眠状态,那么线程 A 会自动放弃 CPU 使用权。线程 B 开始运行,线程 B 也想要获取锁,但是此时锁被 A 线程持有,而且内核抢占还被禁止了!线程 B 无法被调度出去,那么线程 A 就无法运行,锁也就无法释放,死锁发生!
所以,一般在使用自旋锁之前,我们先关闭本地中断。Linux内核也提供了一些相应的API函数:
| 函数 | 描述 |
|---|---|
| void spin_lock_irq(spinlock_t *lock) | 禁止本地中断,并自锁 |
| void spin_unlock_irq(spinlock_t *lock) | 激活本地中断,并解锁 |
| void spin_lock_irqsave(spinlock_t *lock,unsigned long falgs) | 保存中断状态,禁止本地中断,并自锁 |
| void spin_unlock_irqrestore(spinlock_t *lock,unsigned long falgs) | 将中断恢复原来状态,激活本地中断,并解锁 |
3、其他类型的锁
- 读写自旋锁
我们的数据使用自旋锁对其保护时,每次只能一个读和写操作,但是,实际上是可以多个线程并发读取数据的。只需要保证在修改数据的时候没有线程读取,或者读取时,没有线程在修改数据。也就是渡河写操作不能同时进性。所以引入了读写自旋锁。
读写自旋锁为读操作和写操作提供了不同的锁,一次只能允许一个写操作,在进性写操作时,不能进性读操作。可以多线程一起读操作,但读操作时不能进性写操作。Linux内核中定义了rwlock_t结构体(定义在include/linux/rwlock_types.h中)表示读写锁操作:
读写自旋锁的API函数(定义在include/linux/rwlock.h):
| 函数 | 描述 |
|---|---|
| DEFINE_RWLOCK(rwlock_t lock) | 定义并初始化读写锁 |
| void rwlock_init(rwlock_t *lock) | 初始化读写锁 |
| 读锁 | |
| void read_lock(rwlock_t *lock) | 获取读锁 |
| void read_unlock(rwlock_t *lock) | 释放读锁 |
| void read_lock_irq(rwlock_t *lock) | 禁止本地中断,并且获取读锁 |
| void read_unlock_irq(rwlock_t *lock) | 打开本地中断,并且释放读锁 |
| void read_lock_irqsave(rwlock_t *lock, unsigned long flags) | 保存中断状态,禁止本地中断,并获取读锁 |
| void read_unlock_irqrestore(rwlock_t *lock, unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放读锁 |
| 写锁 | |
| void write_lock(rwlock_t *lock) | 获取写锁 |
| void write_unlock(rwlock_t *lock) | 释放写锁 |
| void write_lock_irq(rwlock_t *lock) | 禁止本地中断,并且获取写锁 |
| void write_unlock_irq(rwlock_t *lock) | 打开本地中断,并且释放写锁 |
| void write_lock_irqsave(rwlock_t *lock, unsigned long flags) | 保存中断状态,禁止本地中断,并获取写锁 |
| void write_unlock_irqrestore(rwlock_t *lock, unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放读锁 |
- 顺序锁
顺序锁在读写锁的基础上衍生而来的,使用读写锁的时候读操作和写操作不能同时进行。使用顺序锁的话可以允许在写的时候进行读操作,也就是实现同时读写,但是不允许同时进行并发的写操作。虽然顺序锁的读和写操作可以同时进行,但是如果在读的过程中发生了写操作,最好重新进行读取,保证数据完整性。顺序锁保护的资源不能是指针,因为如果在写操作的时候可能会导致指针无效,而这个时候恰巧有读操作访问指针的话就可能导致意外发生,比如读取野指针导致系统崩溃。
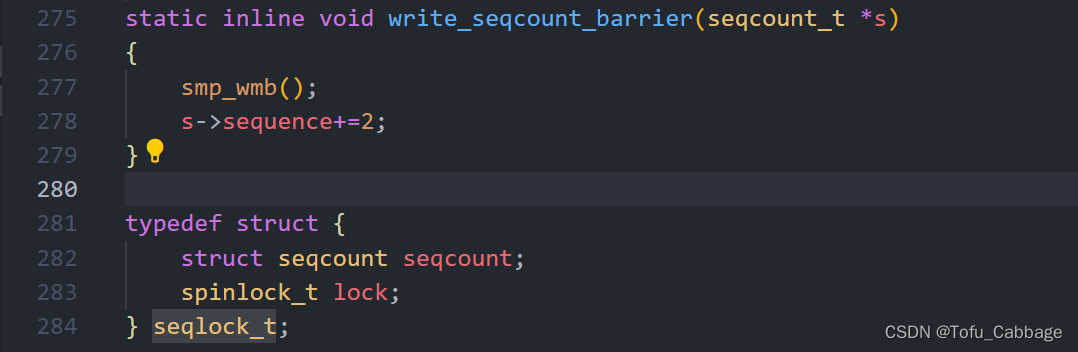
Linux 内核使用 seqlock_t 结构体(定义在include/linux/seqlock.h)表示顺序锁,结构体定义如下:
关于顺序锁的API函数(定义在include/linux/seqlock.h):
| 函数 | 描述 |
|---|---|
| DEFINE_SEQLOCK(seqlock_t sl) | 定义并初始化顺序锁 |
| void seqlock_ini seqlock_t *sl) | 初始化顺序锁 |
| 顺序表写操作 | |
| void write_seqlock(seqlock_t *sl) | 获取写顺序锁 |
| void write_sequnlock(seqlock_t *sl) | 释放写顺序锁 |
| void write_seqlock_irq(seqlock_t *sl) | 禁止本地中断,并且获取写顺序锁 |
| void write_sequnlock_irq(seqlock_t *sl) | 打开本地中断,并且释放写顺序锁 |
| void write_seqlock_irqsave(seqlock_t *sl, unsigned long flags) | 保存中断状态,禁止本地中断,并获取写顺序锁 |
| void write_sequnlock_irqrestore(seqlock_t *sl, unsigned long flags) | 将中断状态恢复到以前的状态,并且激活本地中断,释放写顺序锁 |
| 顺序表读操作 | |
| unsigned read_seqbegin(const seqlock_t *sl) | 读单元访问共享资源的时候调用此函数,此函数会返回顺序锁的顺序号 |
| unsigned read_seqretry(const seqlock_t *sl, unsigned start) | 读结束以后调用此函数检查在读的过程中有没有对资源进行写操作,如果有的话就要重读 |
4、自旋锁使用注意事项
- 因为在等待自旋锁的时候处于“自旋”状态,因此锁的持有时间不能太长,一定要短,否则的 话会降低系统性能。如果临界区比较大,运行时间比较长的话要选择其他的并发处理方式, 比如稍后要讲的信号量和互斥体。
- 自旋锁保护的临界区内不能调用任何可能导致线程休眠的 API 函数,否则的话可能导致死 锁。
- 不能递归申请自旋锁,因为一旦通过递归的方式申请一个你正在持有的锁,那么你就必须 “自旋”,等待锁被释放,然而你正处于“自旋”状态,根本没法释放锁。所以就死锁。
- 在编写驱动程序的时候我们必须考虑到驱动的可移植性,因此不管你用的是单核的还是多核 的 SOC,都将其当做多核 SOC 来编写驱动程序。
四、信号量
1、简介
这里的信号量与FreeRTOS或者UCOS的信号量一样,常常用于控制对共享资源的访问。比如停车位举例:有10个停车位,信号量为10,当有一辆车进来停车,停车位减一,相当于一个线程读取数据一次,信号量减1。当停车位停满了,信号量减为零,就不能再停下一辆车,线程不能再读取数据,只能等别的车离开,才能停车,相当于线程读取数据完成后,信号量加一。此时,又可以停车。
相比于自旋锁,信号量可以时线程进入休眠状态,比如说:A现在再厕所上厕所,这个时候B也想上厕所,但是看到厕所现在A在使用,B就无法使用,B可以一直在厕所等待,就相当于自旋锁。或者B可以先离开去干其他的事,等A上完厕所后再通知B让B去上厕所,就相当于信号量线程可以进入休眠状态。
信号量特点:
- 因为信号量可以使等待资源线程进入休眠状态,因此适用于那些占用资源比较久的场
- 信号量不能用于中断中,因为信号量会引起休眠,中断不能休眠。
- 如果共享资源的持有时间比较短,那就不适合使用信号量了,因为频繁的休眠、切换线 程引起的开销要远大于信号量带来的那点优势。
- 当信号量的值设置为1时,为二值信号量,可以互斥访问。当信号量的值大于1时,为计 数型信号量,不可以互斥访问。
2、信号量API函数
Linux 内核使用 semaphore 结构体(定义在include/linux/semaphore.h)表示信号量:

使用信号量之前先定义和初始化信号量结构体,再使用信号量API函数(定义在include/linux/semaphore.h):
| 函数 | 描述 |
|---|---|
| DEFINE_SEAMPHORE(name) | 定义一个信号量,并且设置信号量的值为 1 |
| void sema_init(struct semaphore *sem, int val) | 初始化信号量 sem,设置信号量值为 val |
| void down(struct semaphore *sem) | 获取信号量,因为会导致休眠,因此不能在中断中使用 |
| int down_trylock(struct semaphore *sem) | 尝试获取信号量,如果能获取到信号量就获取,并且返回 0。如果不能就返回非 0,并且不会进入休眠 |
| int down_interruptible(struct semaphore *sem) | 获取信号量,和 down 类似,只是使用 down 进入休眠状态的线程不能被信号打断。而使用此函数进入休眠以后是可以被信号打断的。 |
| void up(struct semaphore *sem) | 释放信号量 |
四、互斥体
1、简介
将信号量的值设置为 1 就可以使用信号量进行互斥访问了,虽然可以通过信号量实现互斥,但是 Linux 提供了一个比信号量更专业的机制来进行互斥,它就是互斥体—mutex。
互斥访问表示一次只有一个线程可以访问共享资源,不能递归申请互斥体。Linux内核使用mutex结构体(定义在include/linux/mutex.h)表示互斥体: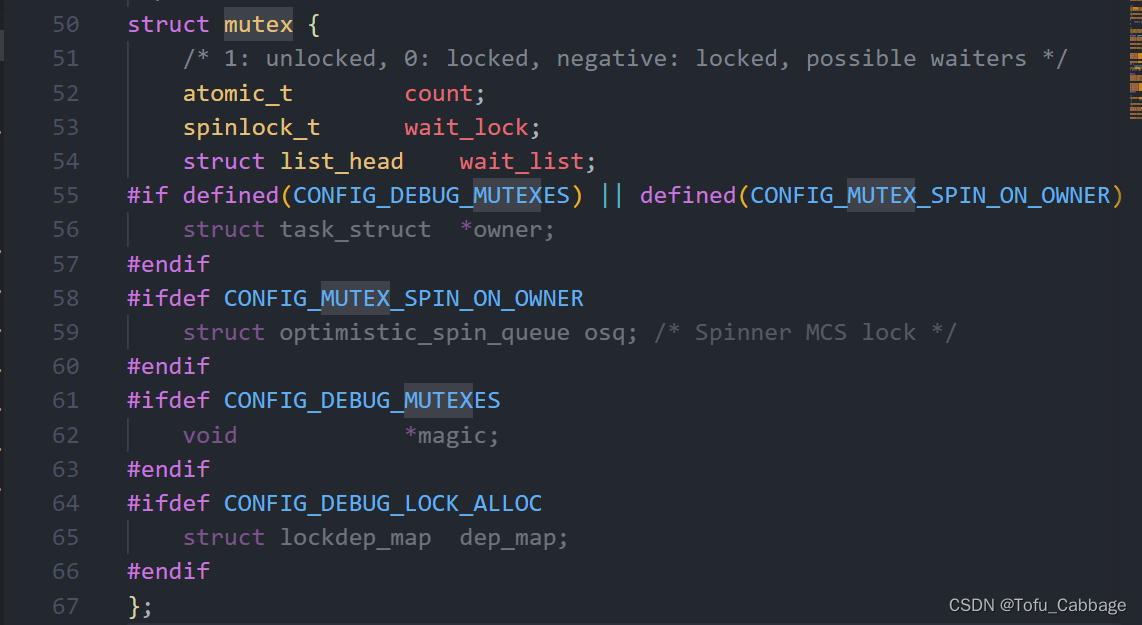
注意事项:
- mutex 可以导致休眠,因此不能在中断中使用 mutex,中断中只能使用自旋锁
- 和信号量一样, mutex 保护的临界区可以调用引起阻塞的 API 函数
- 因为一次只有一个线程可以持有 mutex,因此,必须由 mutex 的持有者释放 mutex。 并且 mutex 不能递归上锁和解锁
2、互斥体API函数
| 函数 | 描述 |
|---|---|
| DEFINE_MUTEX(name) | 定义并初始化一个 mutex 变量 |
| void mutex_init(mutex *lock) | 初始化 mutex |
| void mutex_lock(struct mutex *lock) | 获取 mutex,也就是给 mutex 上锁。如果获取不到就进休眠 |
| void mutex_unlock(struct mutex *lock) | 释放 mutex,也就给 mutex 解锁 |
| int mutex_trylock(struct mutex *lock) | 尝试获取 mutex,如果成功就返回 1,如果失败就返回 0 |
| int mutex_is_locked(struct mutex *lock) | 判断 mutex 是否被获取,如果是的话就返回1,否则返回 0 |
| int mutex_lock_interruptible(struct mutex *lock) | 使用此函数获取信号量失败进入休眠以后可以被信号打断 |
这篇关于七、(正点原子)Linux并发与竞争的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









