本文主要是介绍【自动驾驶技术】自动驾驶汽车AI芯片汇总——TESLA篇(FSD介绍),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
0. 前言
按照国际惯例,首先声明:本文只是我自己学习的理解,虽然参考了他人的宝贵见解及成果,但是内容可能存在不准确的地方。如果发现文中错误,希望批评指正,共同进步。
本篇文章是这个自动驾驶汽车AI芯片系列的第三篇,也算终于轮到特斯拉出场了!(Respect)
自动驾驶汽车AI芯片系列目录:
1. NVIDIA篇
2. 地平线篇
提到特斯拉,大家估计第一反应会想到“FSD”,没错!本文的主角就是“FSD”,或者更准确来说应该是“FSD芯片”。
FSD全称是Full Self-Driving(多么直奔主题),但在开始介绍FSD之前,我想先聊聊特斯拉的自动驾驶平台——HW。
这里的HW就纯是HardWare的意思,与某为毫不相干。
1. TESLA 自动驾驶平台
特斯拉的硬件平台(Hardware Platform,简称HW)是指在其电动汽车中用于自动驾驶功能的计算和传感系统。特斯拉的硬件平台经历了几代的演变,每一版都代表着技术上的进步和对自动驾驶能力的提升:
第一代:HW 1.0
- 发布时间:2014年
- 方案特点:初期版本,包含了摄像头、超声波传感器和雷达。
- SoC芯片:使用的是Mobileye的EyeQ3芯片,主要负责视觉处理,但后来特斯拉和Mobileye因理念不合而分道扬镳。
当时Mobileye客户非常多,估计也没太把特斯拉放在心上。现在的Mobileye……呵呵。
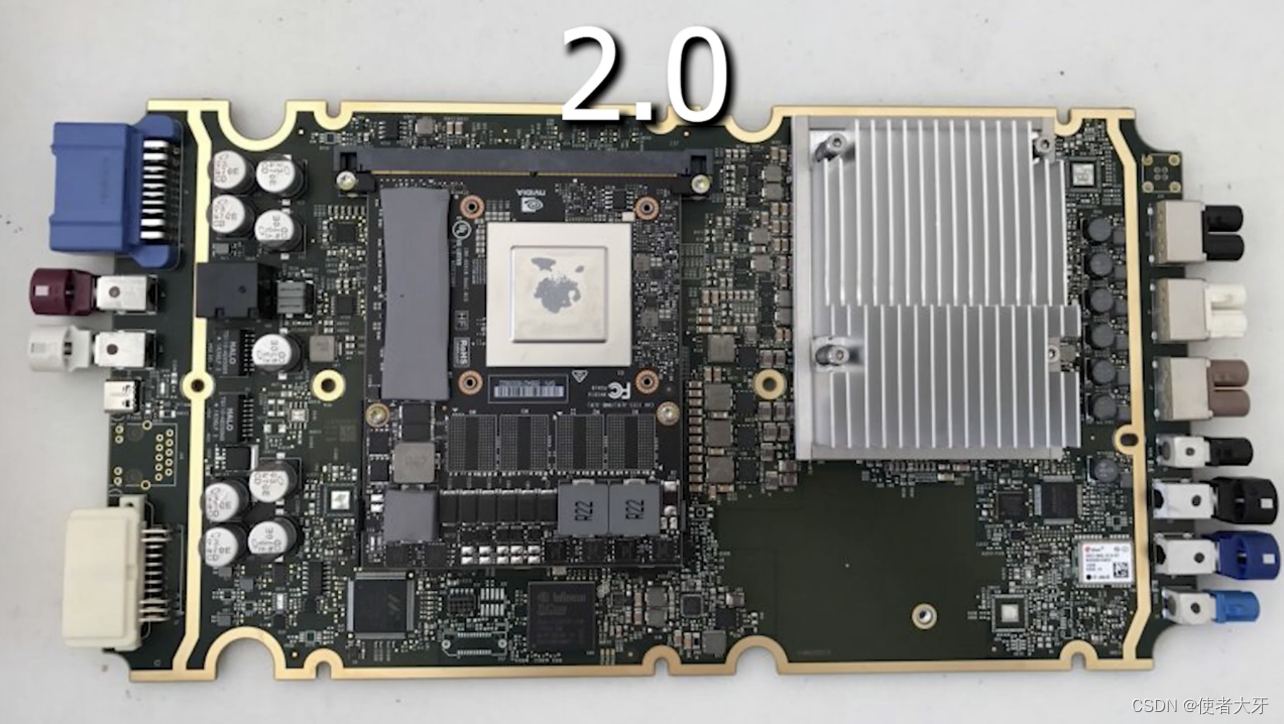
第二代:HW 2.0 / HW 2.5
- 发布时间:2016年
- 方案特点:引入了更多的传感器,包括前置三目摄像头、前后雷达、以及环绕车身的超声波传感器,增强了整体感知能力。
- SoC芯片:
- HW2.0:采用了NVIDIA 的Drive PX2平台。
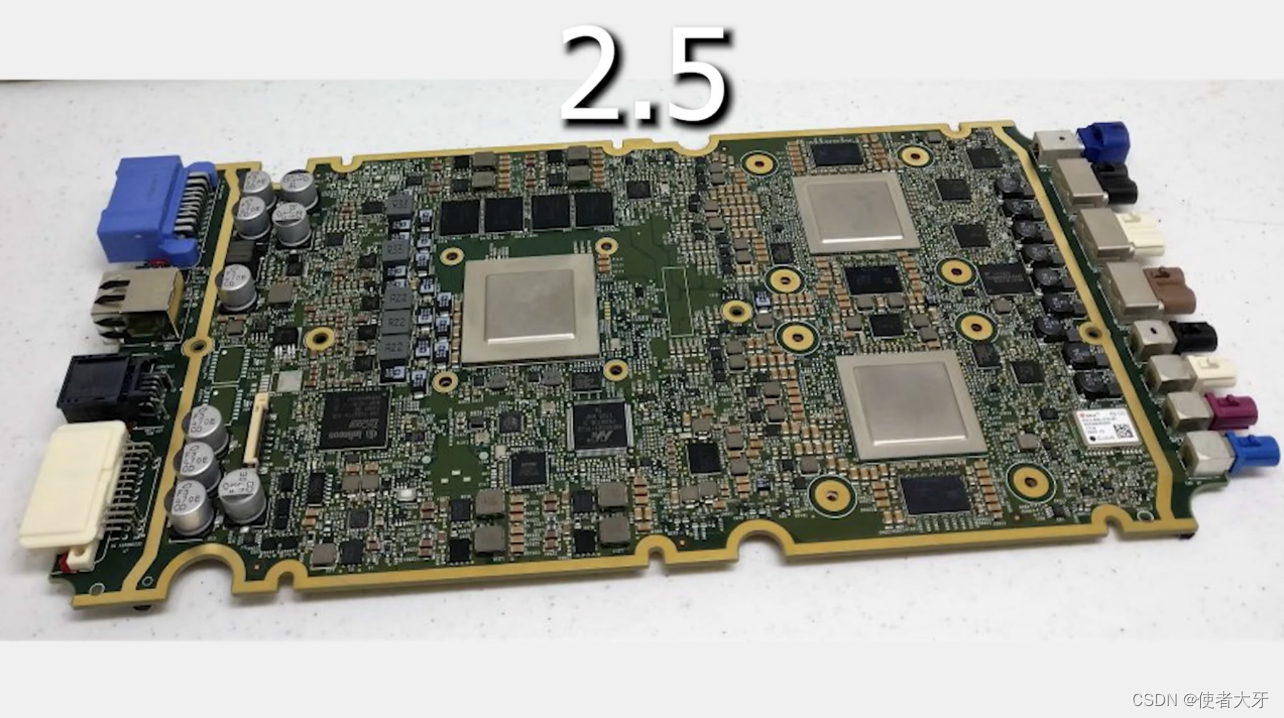
- HW2.5:在HW2.0的基础上增加了额外的NVIDIA Tegra Parker芯片于增强计算能力。
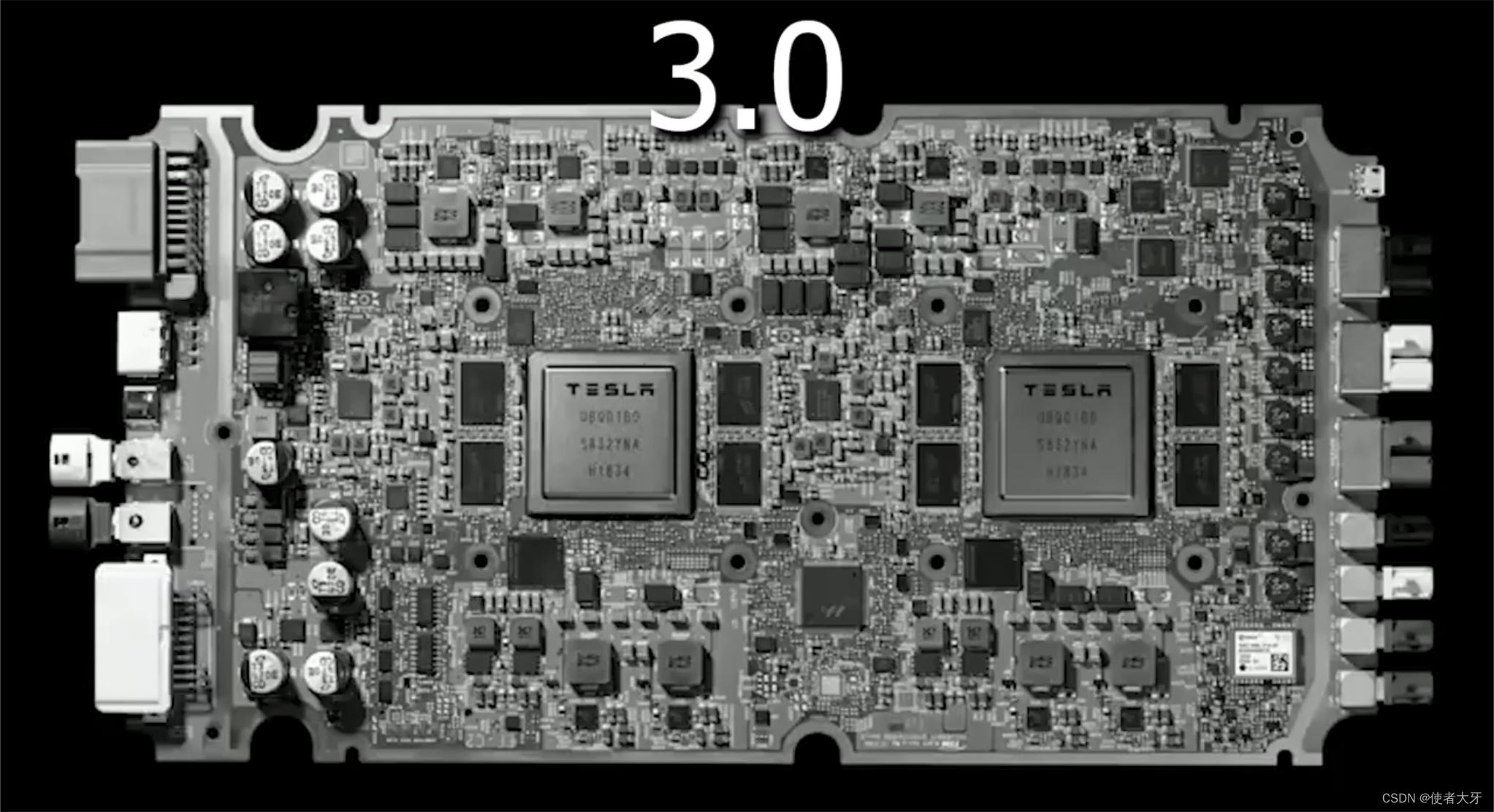
第三代:HW 3.0 (转折点,FSD引入)
- 发布时间:2019年
- 方案特点:特斯拉自研的FSD芯片首次亮相,标志着特斯拉开始全面掌握从芯片设计到软件开发的全栈技术。
- SoC芯片:特斯拉定制的FSD芯片,采用了双核设计,每个核心都有独立的CPU、GPU和神经网络加速器,基于14纳米工艺制造,大幅提升了计算能力和能效比。
第四代:HW 4.0
- 发布时间:2023年
- 方案特点:NNA的数量从2个增加到3个,工作频率也从2.0GHz提升至2.2GHz,这有助于更高效地处理深度学习任务,尤其是针对视觉数据的分析。摄像头的数量和质量均有所提升,从8颗120万像素摄像头升级至7颗500万像素摄像头,这不仅提高了图像清晰度,还增加了探测距离,从200多米提升至424米。
- SoC芯片:特斯拉的下一代FSD芯片,预计采用更先进的制程技术(如7纳米或更小),算力大幅提升5倍,可能达到700多TOPS。有报道指出,HW4.0的FSD芯片可能由台积电采用4纳米或5纳米工艺生产。
从上面HW的发展过程我们可以看出:从HW 3.0开始,特斯拉正式搭载自研的FSD芯片,这家汽车制造公司也掌握了芯片及软件的设计能力。当然,这非常符合马斯克的作风。
由于HW 4.0的公开资料还比较少,本文将基于HW 3.0来说明,也就是大约在特斯拉2019年的技术水平。如果后面有更多的HW 4.0的技术细节,我会再补充本文的内容!
2. HW 3.0架构
特斯拉的Hardware 3.0(简称HW 3.0)是特斯拉自动驾驶计算机的一个重大迭代,它在2019年开始装备于特斯拉的新生产车辆中,用以取代之前的Hardware 2.5。它是专门为特斯拉的Autopilot和未来的完全自动驾驶(Full Self-Driving,FSD)功能设计的。
2.1 架构与设计
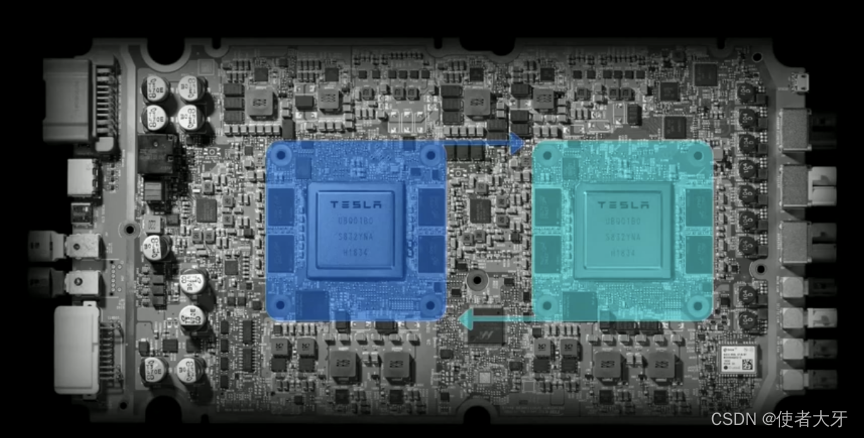
HW 3.0包括两套完全独立的系统,每套系统都配备了独立的CPU、GPU、NNA(神经网络加速器)以及内存,两套系统中的一个作为主系统运行,另一个作为热备份,在主系统出现故障时立即接管,这样可以实现冗余,增加安全性。
双系统设计的另一个好处就是互相校验,对于同一个驾驶场景,两套系统经过一系列的感知、规划算法(或者一整个端到端算法),所得到的驾驶决策应该是一致的,这也进一步提升了自动驾驶的功能安全冗余。
2.2 性能
- 算力:HW 3.0的算力达到了每秒144万亿次运算(144 TOPS),相比之下,Hardware 2.5的算力约为每秒11 TOPS,性能提升了大约13倍。
- 功耗:尽管性能大幅提高,但HW 3.0的功耗仅从Hardware 2.5的60W增加到72W。
- 视频处理能力:HW 3.0能够处理每秒高达2,300帧的图像数据,比Hardware 2.5的每秒200帧有了显著提升。
2.3 兼容性与升级
- 兼容性:特斯拉设计了HW 3.0,使其可以无缝替换Hardware 2.5,这意味着特斯拉可以通过软件更新解锁更多功能,而无需更换整个硬件系统。
- 升级路径:特斯拉车主可以通过付费服务将旧的Hardware 2.5升级至HW 3.0,从而获得更强大的计算能力和未来的FSD功能。
3. FSD芯片
特斯拉的全自动驾驶FSD芯片是该公司为了实现自动驾驶技术而自行设计的专用集成电路(ASIC)。

这款芯片最初在2019年推出,用于取代之前使用的英伟达GPU,旨在提高计算性能和效率,以支持特斯拉车辆中的Autopilot和FSD功能。以下是关于特斯拉FSD芯片的一些关键细节:
3.1 架构和组件
FSD芯片包含多个处理单元,包括以下:
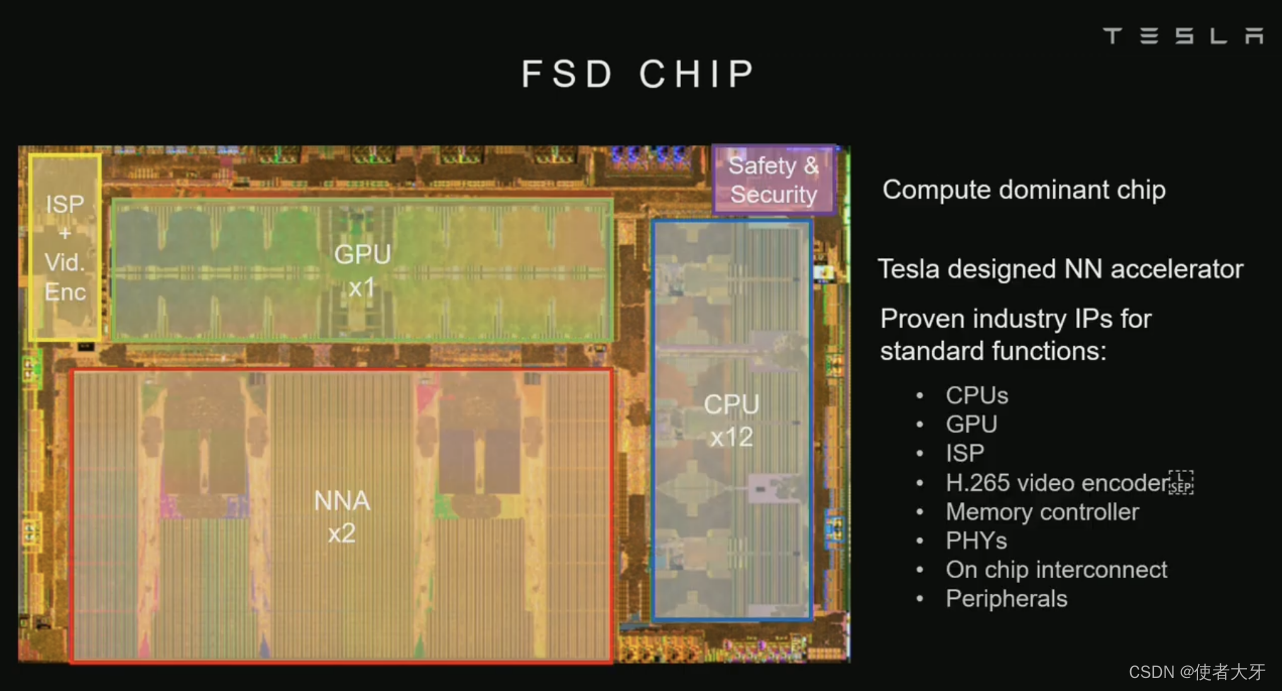
- 3个四核Cortex-A72集群,共计12个CPU核心,运行频率为2.2GHz。
- 1个Mali G71 MP12 GPU,工作频率为1GHz,支持FP16和FP32浮点运算。
- 2个神经网络加速器(NNA),用于深度学习推理,这是FSD芯片的核心部分,用于处理自动驾驶所需的大量视觉和传感器数据,运行频率为2GHz。
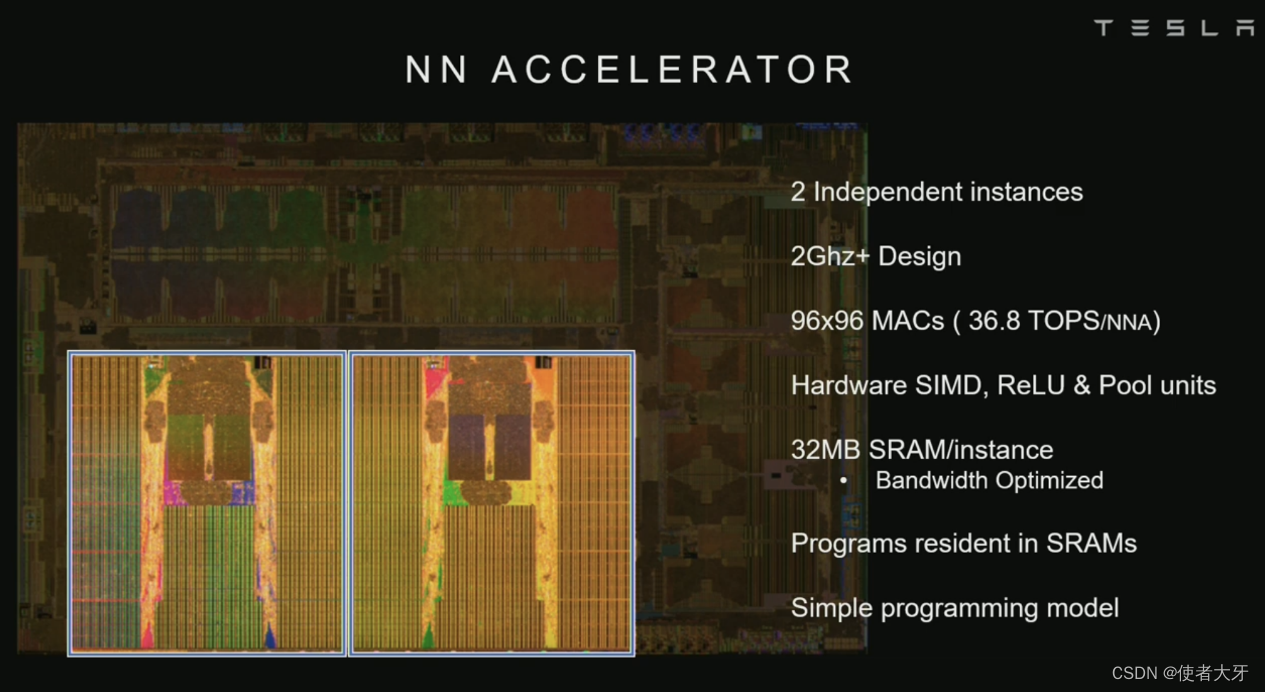
- 32MB的SRAM缓存,用于存储模型权重和加速数据访问。
- ISP和PHY各种通讯接口。
3.2 制造和工艺
HW 3.0的FSD芯片采用三星的14纳米FinFET工艺制造。
3.3 第二代FSD芯片(FSD 2.0 / HW4.0)
- 制造工艺:使用了更先进的7纳米制程技术,有报道甚至提及了4纳米或更先进的3纳米工艺。
- 性能提升:相对于初代FSD芯片,第二代芯片的性能预计提升了三倍以上,这得益于更密集的晶体管布局和优化的电路设计。
- 设计与功能:虽然具体的细节尚未完全公开,但可以预期的是,新一代芯片将包含更强大的CPU、GPU和NPU,以及优化的内存架构,以支持更复杂的神经网络和实时数据处理需求。
4. 总结
特斯拉的FSD芯片代表了该公司在垂直整合和自动驾驶技术方面的重大投资。通过设计自己的芯片,特斯拉能够优化硬件和软件之间的协同工作,从而实现更高的效率和更强大的自动驾驶功能。随着时间的推移,特斯拉继续更新其FSD硬件和软件,以实现更高级别的自动驾驶能力。
这篇关于【自动驾驶技术】自动驾驶汽车AI芯片汇总——TESLA篇(FSD介绍)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






