本文主要是介绍海康视觉算法平台VisionMaster 4.3.0 C# 二次开发01 加载方案并获取结果,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
第一次使用海康视觉算法平台VisionMaster 4.3.0,项目中要使用这个平台进行视觉处理并获取结果。
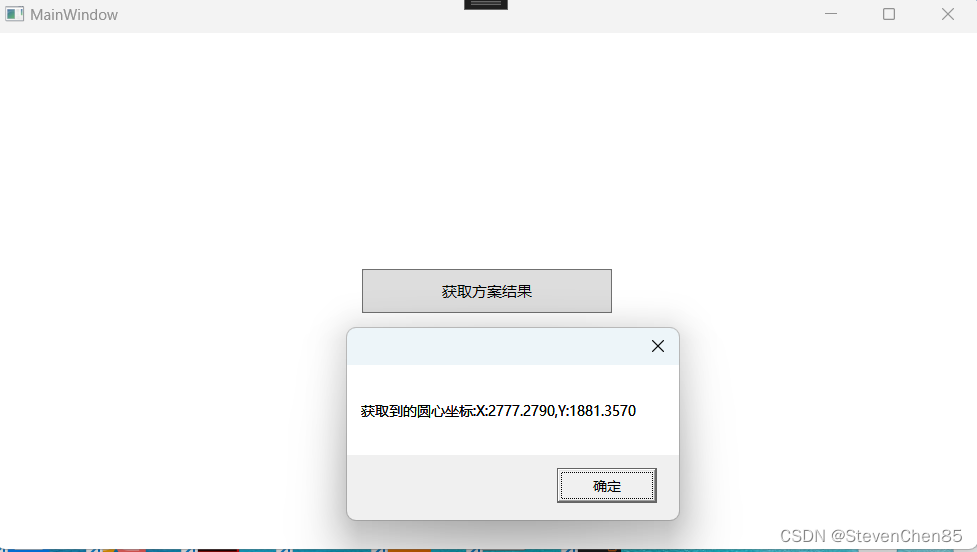
运行效果
开发环境
C#, WPF, vs2022, 海康视觉算法平台VisionMaster 4.3.0
基本概念

上图这些.sol为后缀的是vm的方案文件。
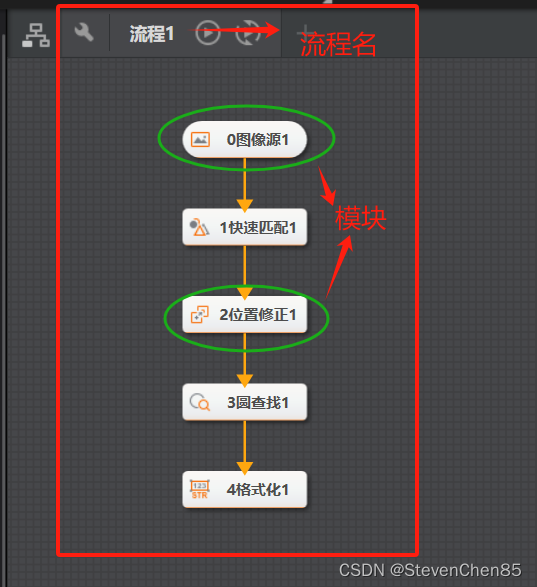
打开方案文件,下图显示的是【方案】里的【流程】,一个方案可以有多个流程,一对多关系。
下图中绿色圈出来叫【模块】
步骤
1.在VM算法平台中创建方案并测试通过。
相关的文章可以看本专栏以前的文单。下面也会给出链接。
2.创建WPF项目。
3.添加引用。(重点)
3.1 找到VM安装目录下的二开DLL文件目录。
我是安装在D盘的:D:\Program Files\VisionMaster4.3.0\Development\V4.x\ComControls\Assembly
大家的目录应该和我的差不多,可能只是盘符不一样。
3.2 在项目中添加引用
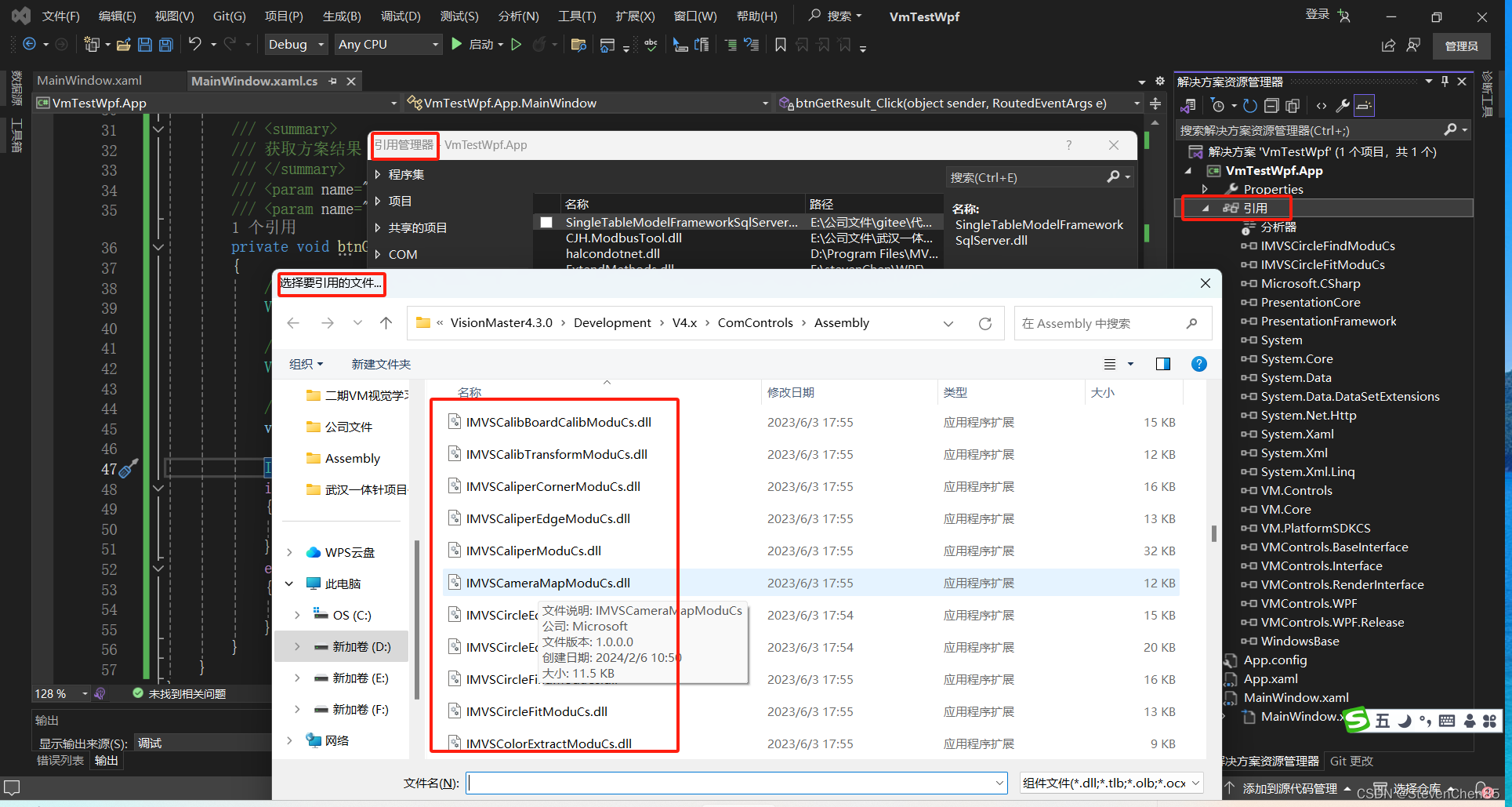
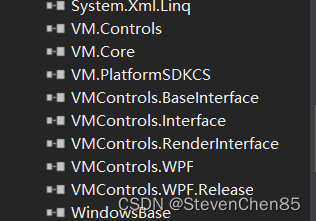
这么多DLL具体引用什么呢?下图
这是基本引用。
如果用到了其他模块要添加对应该的DLL文件。也很好找。根据VisionMaster算法平台SDK开发指南V4.3.1(.NET)相关的接口函数中看到的第一段名称同名。
以找圆为例:
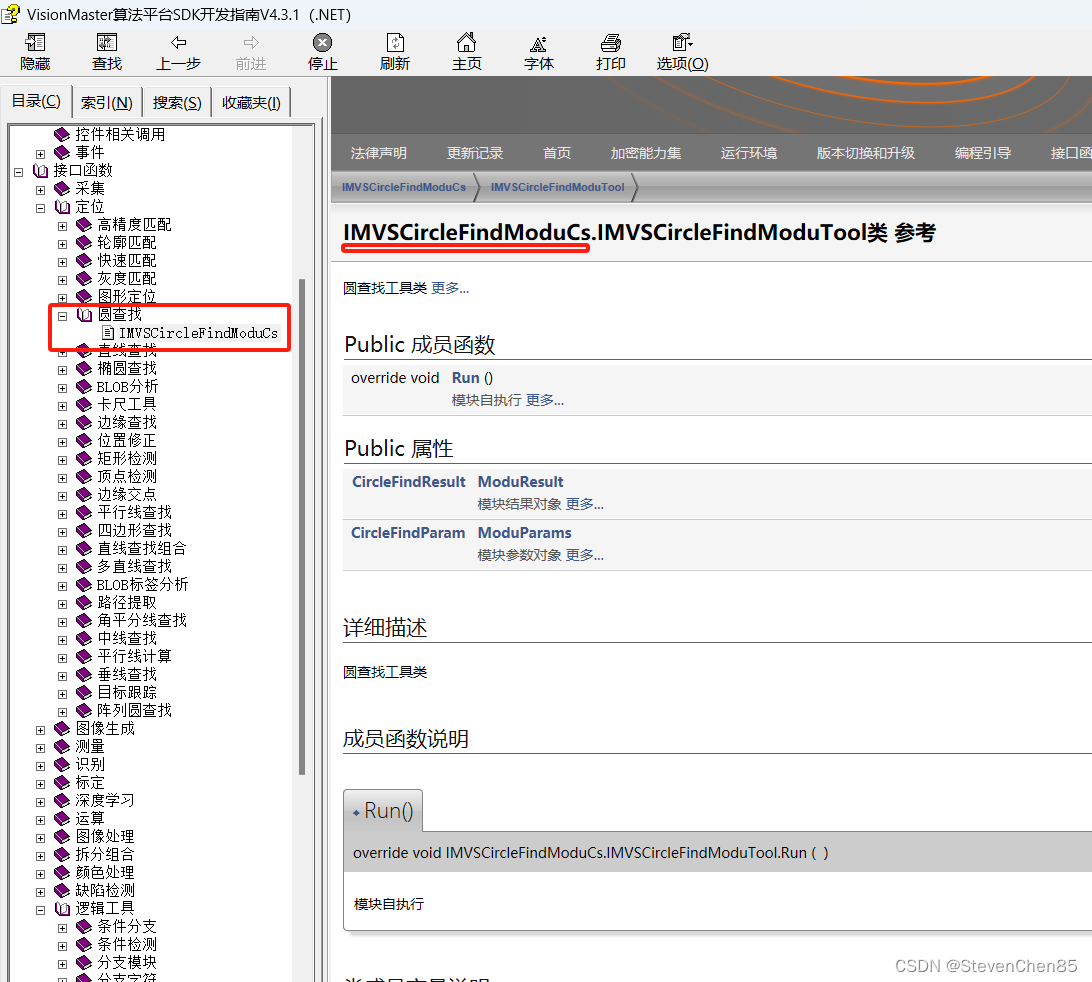
上图中用红线标出来的就是DLL文件名。
在用这个模块相关的类时要先添加引用。
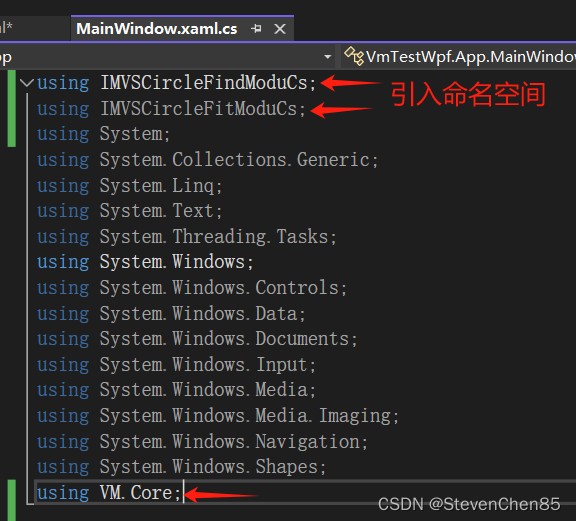
代码
窗体代码 如果要添加VM相关控件。要在窗体中添加引用
xmlns:vm="clr-namespace:VMControls.WPF.Release;assembly=VMControls.WPF.Release" 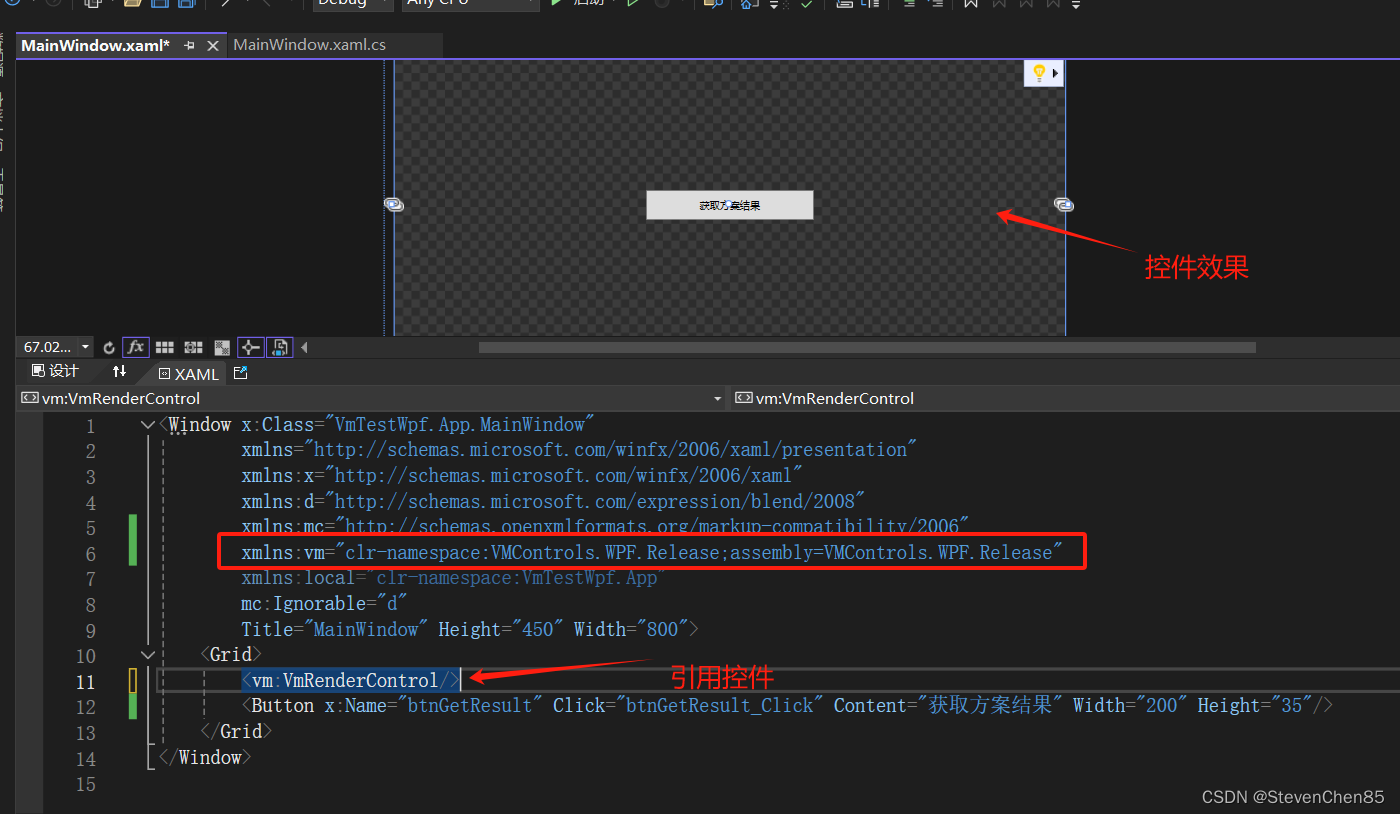
按钮代码
获取方案结果
/// <summary>
/// 获取方案结果
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void btnGetResult_Click(object sender, RoutedEventArgs e)
{//加载方案VmSolution.Load("F:/二期VM视觉学习/标定相机找圆心20240614.sol",string.Empty);//使用流程名称获取流程对象VmProcedure vmProcedure = (VmProcedure)VmSolution.Instance["流程1"];//运行一次流程才能拿到结果vmProcedure.SyncRun();IMVSCircleFindModuTool circleFitResult = (IMVSCircleFindModuTool)VmSolution.Instance["流程1.圆查找1"];if (circleFitResult != null){MessageBox.Show("获取到的圆心坐标:X:" + circleFitResult.ModuResult.OutputCircle.CenterPoint.X.ToString("0.0000") + ",Y:" + circleFitResult.ModuResult.OutputCircle.CenterPoint.Y.ToString("0.0000"));}else{MessageBox.Show("失败");}
}注意:加载方案时路径不建议写死。比较好的方法是将方案文件复制到bin目录下的一个固定文件夹里,再用获取程序当前路径的方式获取后再拼接。
// 获取应用程序的执行目录
string appDirectory = Assembly.GetExecutingAssembly().Location;
appDirectory = appDirectory.Substring(0, appDirectory.LastIndexOf("\\") + 1);
string imagePathRelative = "VmProCess/标定相机找圆心20240614.sol";这篇关于海康视觉算法平台VisionMaster 4.3.0 C# 二次开发01 加载方案并获取结果的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



