本文主要是介绍DSP28335:独立按键控制LED灯,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
做任何事情不可操之过急,虽然我们可能在之前的单片机学过相关的原理,但是一个新的单片机依然有他的学习的地方,之前我觉得很简单,就跳过这个学习,结果到后面就很浮躁,导致后面的内容与这一章相连接的时候,就不会了,导致又要重新学这个知识
通过这一章,我们主要学习GPIO作为输入的代码编写;
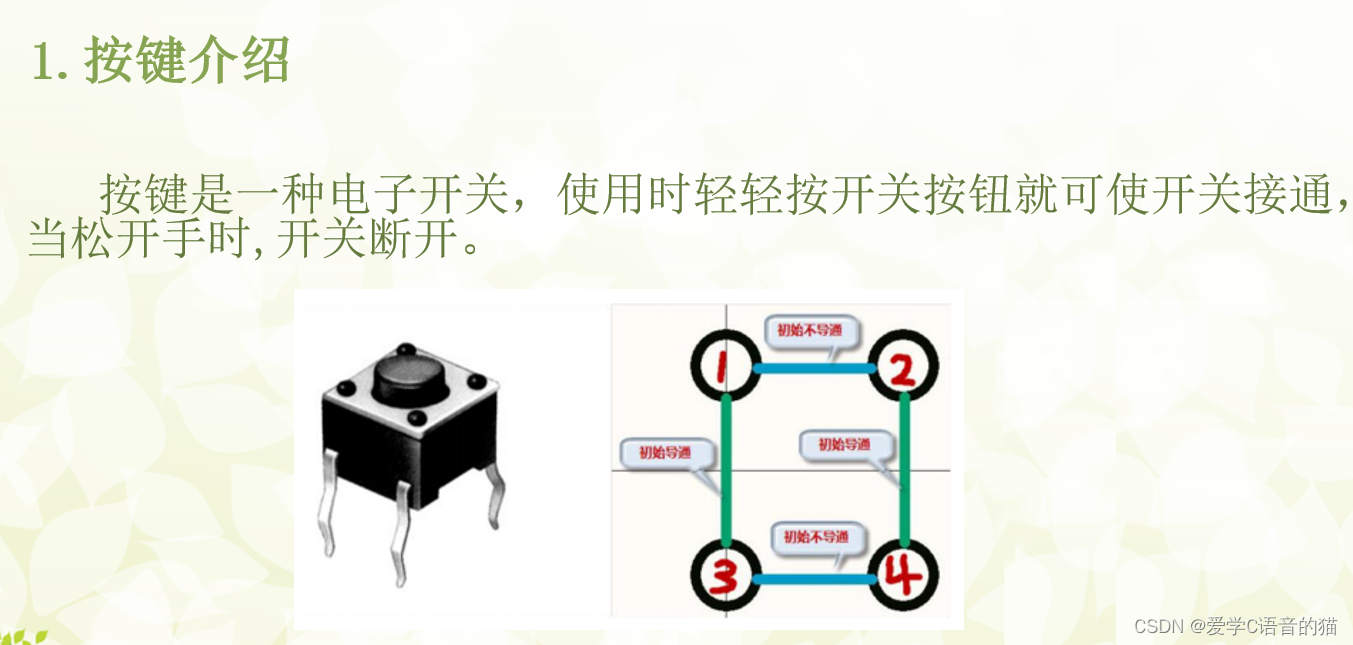
单个独立按键的原理是下图所示:因为一个管脚一个连接GPIO,一个连接GND。、
I/O口有上拉电阻,默认GPIO是高电平,当你按下的时候,与GND连接,所以变成了低电平
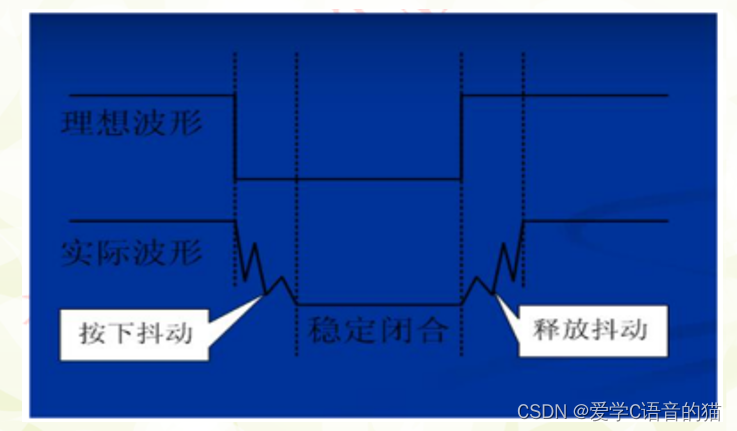 唯一需要考虑的是,抖动的问题:大部分通过软件进行滤除。
唯一需要考虑的是,抖动的问题:大部分通过软件进行滤除。
操作板上的是3*3矩阵按键,这样设计的方法是为了减少I/O的数量,
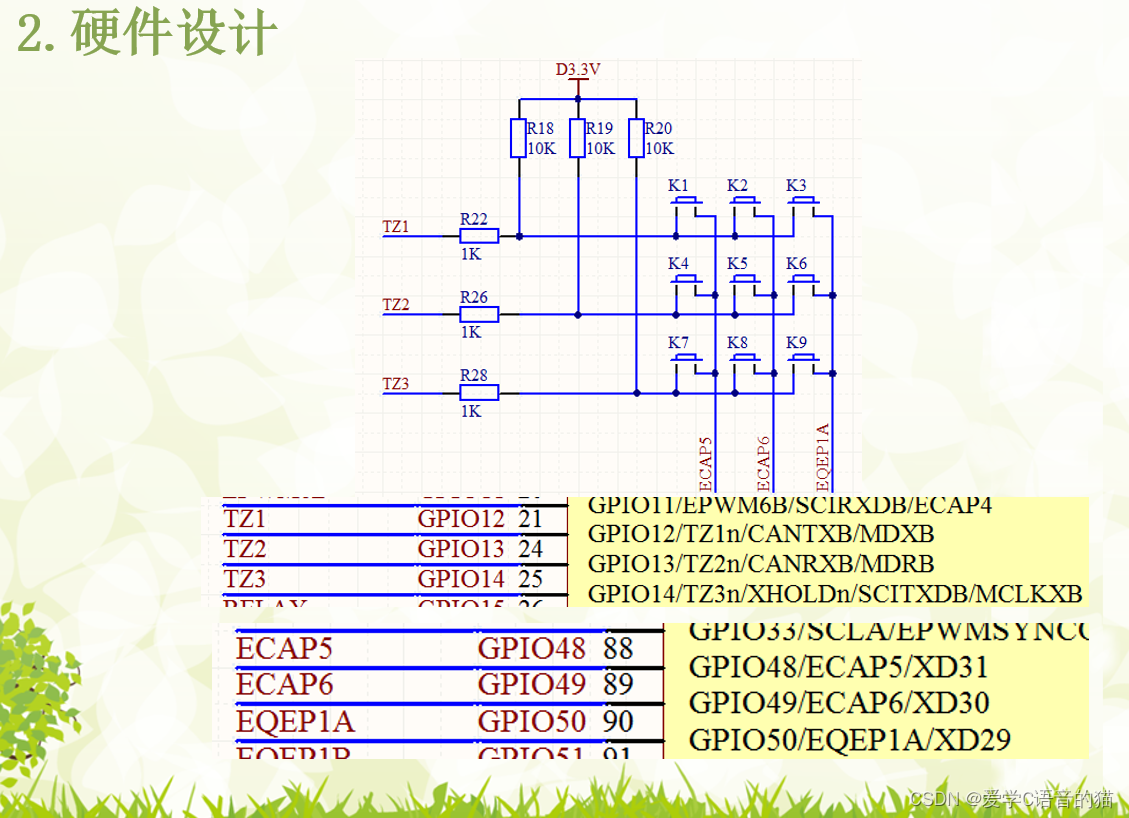
那我们怎么知道是哪个按键按下了呢?
行列扫描法检测时, 先送一列为低电平, 其余几列全为高电平(此时我们确定了列数),然后立即轮流检测一次各行是否有低电平, 若检测到某一行为低电平(这时我们又确定了行数), 则我们便可确认当前被按下的键是哪一行哪一列的, 用同样方法轮流送各列一次低电平,再轮流检测一次各行是否变为低电平, 这样即可检测完所有的按键, 当有键被按下时便可判断出按下的键是哪一个键。 当然我们也可以将行线置低电平, 扫描列是否有低电平。 从而达到整个键盘的检测。
本章所要实现的功能是:通过操作3*3矩阵键盘控制LED指示灯,并且控制LED1指示灯不断闪烁,提示系统正在运行。程序框架如下:
(1)初始化按键IO口(使能对应IO外设时钟、配置IO为普通IO功能和输出模式、上拉设置等) (2)按键检测程序
(3)按键控制程序
下面是代码编写:
1.新建工程:(之前的博客写过,这里不再写)
2.代码如下
leds.c
#include "leds.h"/*******************************************************************************
* 函 数 名 : LED_Init
* 函数功能 : LED初始化函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void LED_Init(void)
{EALLOW;SysCtrlRegs.PCLKCR3.bit.GPIOINENCLK = 1;// 开启GPIO时钟//LED1端口配置GpioCtrlRegs.GPCMUX1.bit.GPIO68=0;//设置为通用GPIO功能GpioCtrlRegs.GPCDIR.bit.GPIO68=1;//设置GPIO方向为输出GpioCtrlRegs.GPCPUD.bit.GPIO68=0;//使能GPIO上拉电阻//LED2端口配置GpioCtrlRegs.GPCMUX1.bit.GPIO67=0;GpioCtrlRegs.GPCDIR.bit.GPIO67=1;GpioCtrlRegs.GPCPUD.bit.GPIO67=0;//LED3端口配置GpioCtrlRegs.GPCMUX1.bit.GPIO66=0;GpioCtrlRegs.GPCDIR.bit.GPIO66=1;GpioCtrlRegs.GPCPUD.bit.GPIO66=0;//LED4端口配置GpioCtrlRegs.GPCMUX1.bit.GPIO65=0;GpioCtrlRegs.GPCDIR.bit.GPIO65=1;GpioCtrlRegs.GPCPUD.bit.GPIO65=0;//LED5端口配置GpioCtrlRegs.GPCMUX1.bit.GPIO64=0;GpioCtrlRegs.GPCDIR.bit.GPIO64=1;GpioCtrlRegs.GPCPUD.bit.GPIO64=0;//LED6端口配置GpioCtrlRegs.GPAMUX1.bit.GPIO10=0;GpioCtrlRegs.GPADIR.bit.GPIO10=1;GpioCtrlRegs.GPAPUD.bit.GPIO10=0;//LED7端口配置GpioCtrlRegs.GPAMUX1.bit.GPIO11=0;GpioCtrlRegs.GPADIR.bit.GPIO11=1;GpioCtrlRegs.GPAPUD.bit.GPIO11=0;GpioDataRegs.GPCSET.bit.GPIO68=1;GpioDataRegs.GPCSET.bit.GPIO67=1;GpioDataRegs.GPCSET.bit.GPIO66=1;GpioDataRegs.GPCSET.bit.GPIO65=1;GpioDataRegs.GPCSET.bit.GPIO64=1;GpioDataRegs.GPASET.bit.GPIO10=1;GpioDataRegs.GPASET.bit.GPIO11=1;EDIS;
}
led.h
#ifndef _LEDS_H_
#define _LEDS_H_#include "DSP2833x_Device.h" // DSP2833x 头文件
#include "DSP2833x_Examples.h" // DSP2833x 例子相关头文件#define LED1_OFF (GpioDataRegs.GPCSET.bit.GPIO68=1)
#define LED1_ON (GpioDataRegs.GPCCLEAR.bit.GPIO68=1)
#define LED1_TOGGLE (GpioDataRegs.GPCTOGGLE.bit.GPIO68=1)#define LED2_OFF (GpioDataRegs.GPCSET.bit.GPIO67=1)
#define LED2_ON (GpioDataRegs.GPCCLEAR.bit.GPIO67=1)
#define LED2_TOGGLE (GpioDataRegs.GPCTOGGLE.bit.GPIO67=1)#define LED3_OFF (GpioDataRegs.GPCSET.bit.GPIO66=1)
#define LED3_ON (GpioDataRegs.GPCCLEAR.bit.GPIO66=1)
#define LED3_TOGGLE (GpioDataRegs.GPCTOGGLE.bit.GPIO66=1)#define LED4_OFF (GpioDataRegs.GPCSET.bit.GPIO65=1)
#define LED4_ON (GpioDataRegs.GPCCLEAR.bit.GPIO65=1)
#define LED4_TOGGLE (GpioDataRegs.GPCTOGGLE.bit.GPIO65=1)#define LED5_OFF (GpioDataRegs.GPCSET.bit.GPIO64=1)
#define LED5_ON (GpioDataRegs.GPCCLEAR.bit.GPIO64=1)
#define LED5_TOGGLE (GpioDataRegs.GPCTOGGLE.bit.GPIO64=1)#define LED6_OFF (GpioDataRegs.GPASET.bit.GPIO10=1)
#define LED6_ON (GpioDataRegs.GPACLEAR.bit.GPIO10=1)
#define LED6_TOGGLE (GpioDataRegs.GPATOGGLE.bit.GPIO10=1)#define LED7_OFF (GpioDataRegs.GPASET.bit.GPIO11=1)
#define LED7_ON (GpioDataRegs.GPACLEAR.bit.GPIO11=1)
#define LED7_TOGGLE (GpioDataRegs.GPATOGGLE.bit.GPIO11=1)void LED_Init(void);#endif /* LED_H_ */
key.h
#ifndef _KEY_H_
#define _KEY_H_#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File#define KEY_L1_SetL (GpioDataRegs.GPBCLEAR.bit.GPIO48=1)
#define KEY_L2_SetL (GpioDataRegs.GPBCLEAR.bit.GPIO49=1)
#define KEY_L3_SetL (GpioDataRegs.GPBCLEAR.bit.GPIO50=1)#define KEY_L1_SetH (GpioDataRegs.GPBSET.bit.GPIO48=1)
#define KEY_L2_SetH (GpioDataRegs.GPBSET.bit.GPIO49=1)
#define KEY_L3_SetH (GpioDataRegs.GPBSET.bit.GPIO50=1)#define KEY_H1 (GpioDataRegs.GPADAT.bit.GPIO12)//第一行,获取这个为是否为高电平,判断
#define KEY_H2 (GpioDataRegs.GPADAT.bit.GPIO13)//
#define KEY_H3 (GpioDataRegs.GPADAT.bit.GPIO14)//#define KEY1_PRESS 1
#define KEY2_PRESS 2
#define KEY3_PRESS 3
#define KEY4_PRESS 4
#define KEY5_PRESS 5
#define KEY6_PRESS 6
#define KEY7_PRESS 7
#define KEY8_PRESS 8
#define KEY9_PRESS 9
#define KEY_UNPRESS 0void KEY_Init(void);
char KEY_Scan(char mode);#endif /* APP_KEY_KEY_H_ */
key.c
#include "key.h"
void KEY_Init(void)
{EALLOW;//关闭写保护SysCtrlRegs.PCLKCR3.bit.GPIOINENCLK = 1;// 开启GPIO时钟//KEY端口配置GpioCtrlRegs.GPAMUX1.bit.GPIO12=0;GpioCtrlRegs.GPADIR.bit.GPIO12=0;//配置为输入GpioCtrlRegs.GPAPUD.bit.GPIO12=0;//配置上拉电阻GpioCtrlRegs.GPAMUX1.bit.GPIO13=0;GpioCtrlRegs.GPADIR.bit.GPIO13=0;//配置为输入GpioCtrlRegs.GPAPUD.bit.GPIO13=0;GpioCtrlRegs.GPAMUX1.bit.GPIO14=0;GpioCtrlRegs.GPADIR.bit.GPIO14=0;//配置为输入GpioCtrlRegs.GPAPUD.bit.GPIO14=0;GpioCtrlRegs.GPBMUX2.bit.GPIO48=0;GpioCtrlRegs.GPBDIR.bit.GPIO48=1;//配置为输出GpioCtrlRegs.GPBPUD.bit.GPIO48=0;GpioCtrlRegs.GPBMUX2.bit.GPIO49=0;GpioCtrlRegs.GPBDIR.bit.GPIO49=1;//配置为输出GpioCtrlRegs.GPBPUD.bit.GPIO49=0;GpioCtrlRegs.GPBMUX2.bit.GPIO50=0;GpioCtrlRegs.GPBDIR.bit.GPIO50=1;//配置为输出GpioCtrlRegs.GPBPUD.bit.GPIO50=0;EDIS;GpioDataRegs.GPBSET.bit.GPIO48=1;//输出为高电平GpioDataRegs.GPBSET.bit.GPIO49=1;GpioDataRegs.GPBSET.bit.GPIO50=1;}char KEY_Scan(char mode)
{//行列式扫描方法static char keyl1=1;//static char keyl2=1;static char keyl3=1;//第1列扫描KEY_L1_SetL;//表示第一列输出低电平KEY_L2_SetH;//表示第二列输出低电平KEY_L3_SetH;//表示第三列输出低电平if(keyl1==1&&(KEY_H1==0||KEY_H2==0||KEY_H3==0)){DELAY_US(10000);keyl1=0;if(KEY_H1==0){return KEY1_PRESS;}else if(KEY_H2==0){return KEY4_PRESS;}else if(KEY_H3==0){return KEY7_PRESS;}}else if(KEY_H1==1&&KEY_H2==1&&KEY_H3==1){keyl1=1;}if(mode)keyl1=1;//第2列扫描KEY_L2_SetL;KEY_L1_SetH;KEY_L3_SetH;if(keyl2==1&&(KEY_H1==0||KEY_H2==0||KEY_H3==0)){DELAY_US(10000);keyl2=0;if(KEY_H1==0){return KEY2_PRESS;}else if(KEY_H2==0){return KEY5_PRESS;}else if(KEY_H3==0){return KEY8_PRESS;}}else if(KEY_H1==1&&KEY_H2==1&&KEY_H3==1){keyl2=1;}if(mode)keyl2=1;//第3列扫描KEY_L3_SetL;KEY_L1_SetH;KEY_L2_SetH;if(keyl3==1&&(KEY_H1==0||KEY_H2==0||KEY_H3==0)){DELAY_US(10000);keyl3=0;if(KEY_H1==0){return KEY3_PRESS;}else if(KEY_H2==0){return KEY6_PRESS;}else if(KEY_H3==0){return KEY9_PRESS;}}else if(KEY_H1==1&&KEY_H2==1&&KEY_H3==1){keyl3=1;}if(mode)keyl3=1;return KEY_UNPRESS;
}这篇关于DSP28335:独立按键控制LED灯的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







