本文主要是介绍「TCP 重要机制」三次握手四次挥手,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
🎇个人主页:Ice_Sugar_7
🎇所属专栏:计网
🎇欢迎点赞收藏加关注哦!
三次握手&四次挥手
- 🍉连接管理
- 🍌三次握手
- 🍌意义
- 🍌四次挥手
- 🍌TCP 状态转换
- 🥝LISTENING 状态
- 🥝ESTABLISHED 状态
- 🥝CLOSE_WAIT & TIME_WAIT 状态
🍉连接管理
有连接是 TCP 的特点之一
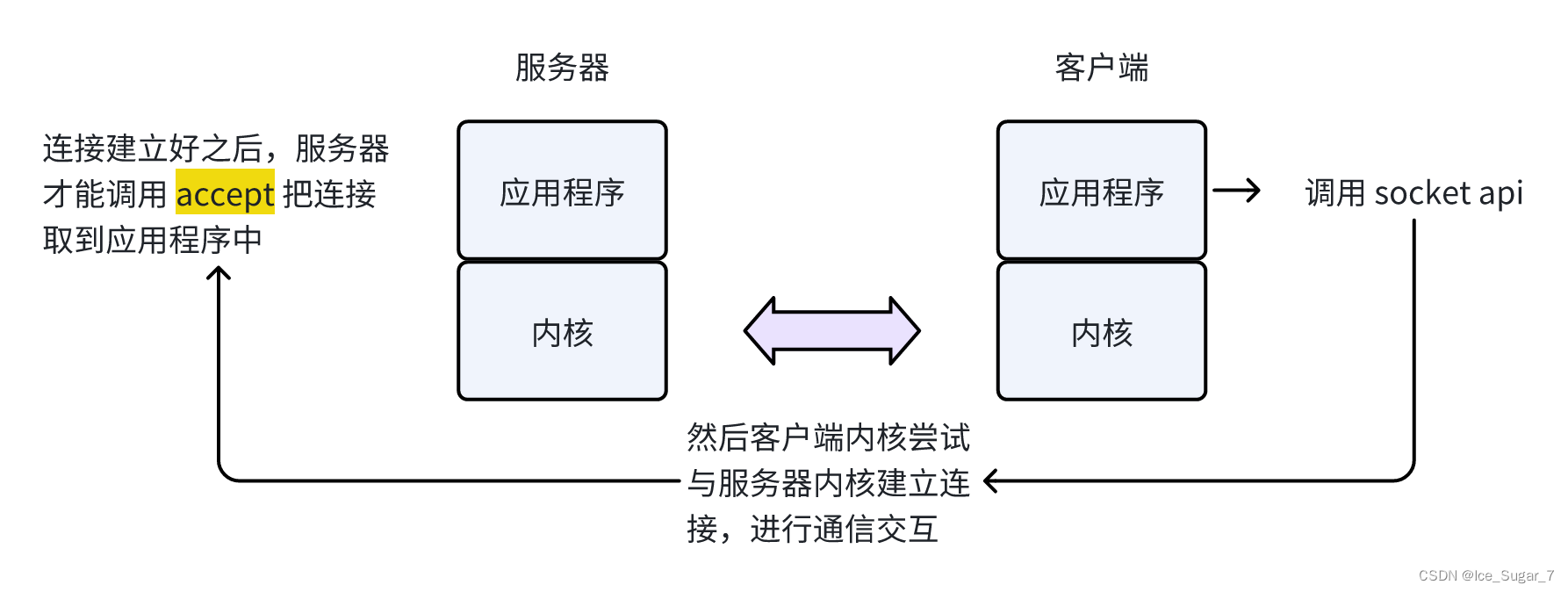
socket = new Socket(serverIp,serverPort);
执行这行代码其实就是在建立连接,不过这只是在调用 socket api,真正建立连接是在操作系统内核完成的,见下图:
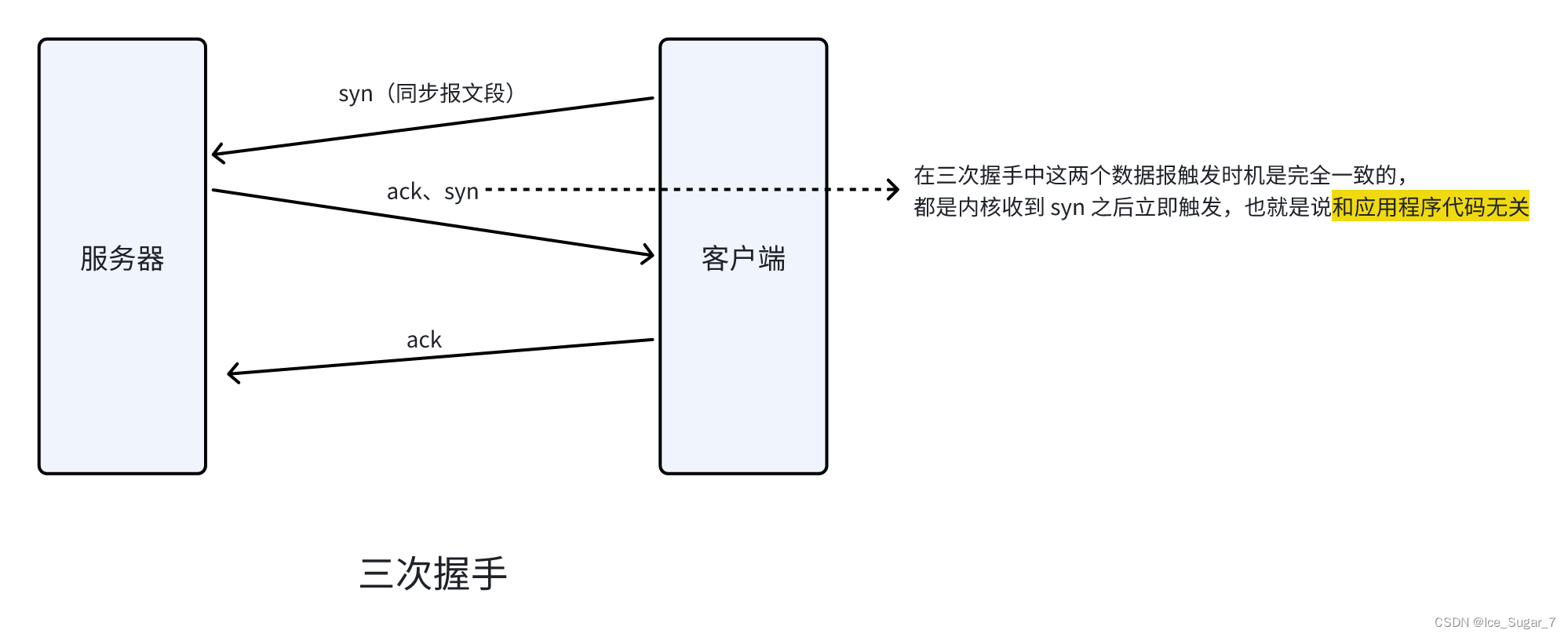
🍌三次握手
内核通过三次握手来完成建立连接的过程
在此之前得先介绍一种数据报—— syn
syn 是一个特殊的 TCP 数据报,它
没有载荷,因此不会携带应用层数据;
同时标志位中的 SYN 值为 1
虽说无载荷,但是它也有 IP 报头、以太网数据帧帧头、TCP 报头等。其中 TCP 报头和 IP 报头分别包含客户端自己的端口和 IP
syn 其实是 synchronized 的缩写,它是多线程的常客,意为同步。多线程使用 synchronized 加锁实现的同步是协调多个线程间的执行顺序;而 TCP 这里的同步是指进入连接状态,客户端和服务器相互配合完成一系列工作。可以理解为 syn 就是客户端给服务器打个招呼,表示要与它建立连接,服务器收到后要发个 ack 回应一下,同时发个 syn 表示同意连接
🍌意义
- 三次握手可以初步确认通信
链路是否畅通,这是确保可靠性的前提条件 - 三次握手可以验证通信双方发送能力和接收能力是否正常

由此衍生出一道面试题:能否握两次手?四次呢?
A:两次肯定不行,因为服务器这边还无法确认自己的发送能力和对端的接收能力是否正常,因此需要服务端再来一次握手,把信息同步给服务器;四次可以,但是没必要
- 三次握手的过程中也会协商一些必要的参数
通信是客户端和服务器两端共同配合完成的,所以有些参数要进行协商,这些参数往往是在“选项”中体现的
我们前面说“选项”可有可无,最少占 0 个字节,最多占 40 字节(报头最大长度为 60,去掉固定的 20,就剩下 40 字节)。选项中的信息我们不用去深究,不过有一个信息是比较关键的 —— TCP 通信的序号起始值
TCP 在一次通信过程中,序号不是从 0 或 1 开始的,而是先选择一个比较大的数字,从它开始计算,而且即使是同一个客户端和服务器,每次连接的起始值都不同。这里的“不同”不是随机给一个值,而是经过一系列的分配策略得出的。这样做的好处在于避免处理到上次连接的数据报
数据报在传输过程中遇到阻塞,迟迟没有到达对端,可能在本次连接断开后还没到达,等到下次连接建立时才到达,但此时已经是别的客户端了,不适合处理上次连接的数据报,应该把它丢弃
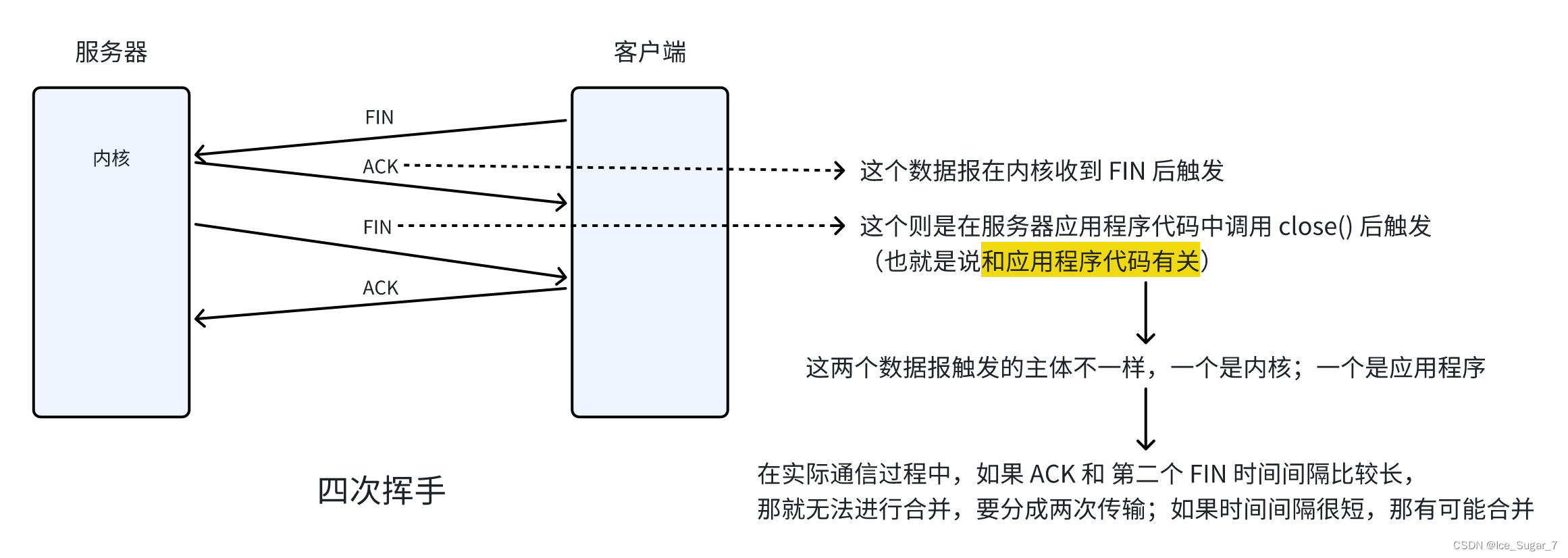
🍌四次挥手
每个客户端/服务器都要保存对端的信息,这些信息需要使用一定的数据结构来存储,断开连接的本质就是把对端的信息从数据结构中删掉/释放掉
四次挥手中,服务器和客户端其中一方先调用 socket.close(),然后触发 FIN,即向对端发送 FIN 结束报文段
(除了调用 close(),结束进程也会触发 FIN。这两种方式本质都是关闭 socket 文件)
假设是客户端请求断开连接,那么四次挥手流程如下:
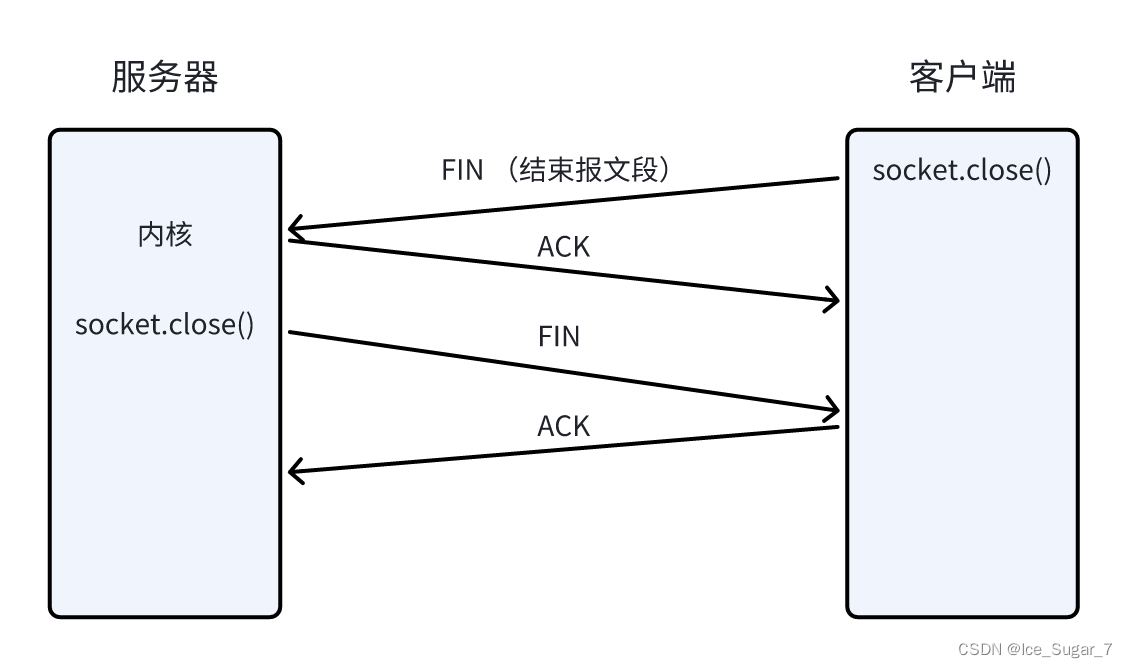
注意四次挥手中间的两步不像三次握手,不一定可以合并
下面总结一下这两者之间的相似之处和不同之处
相似点:
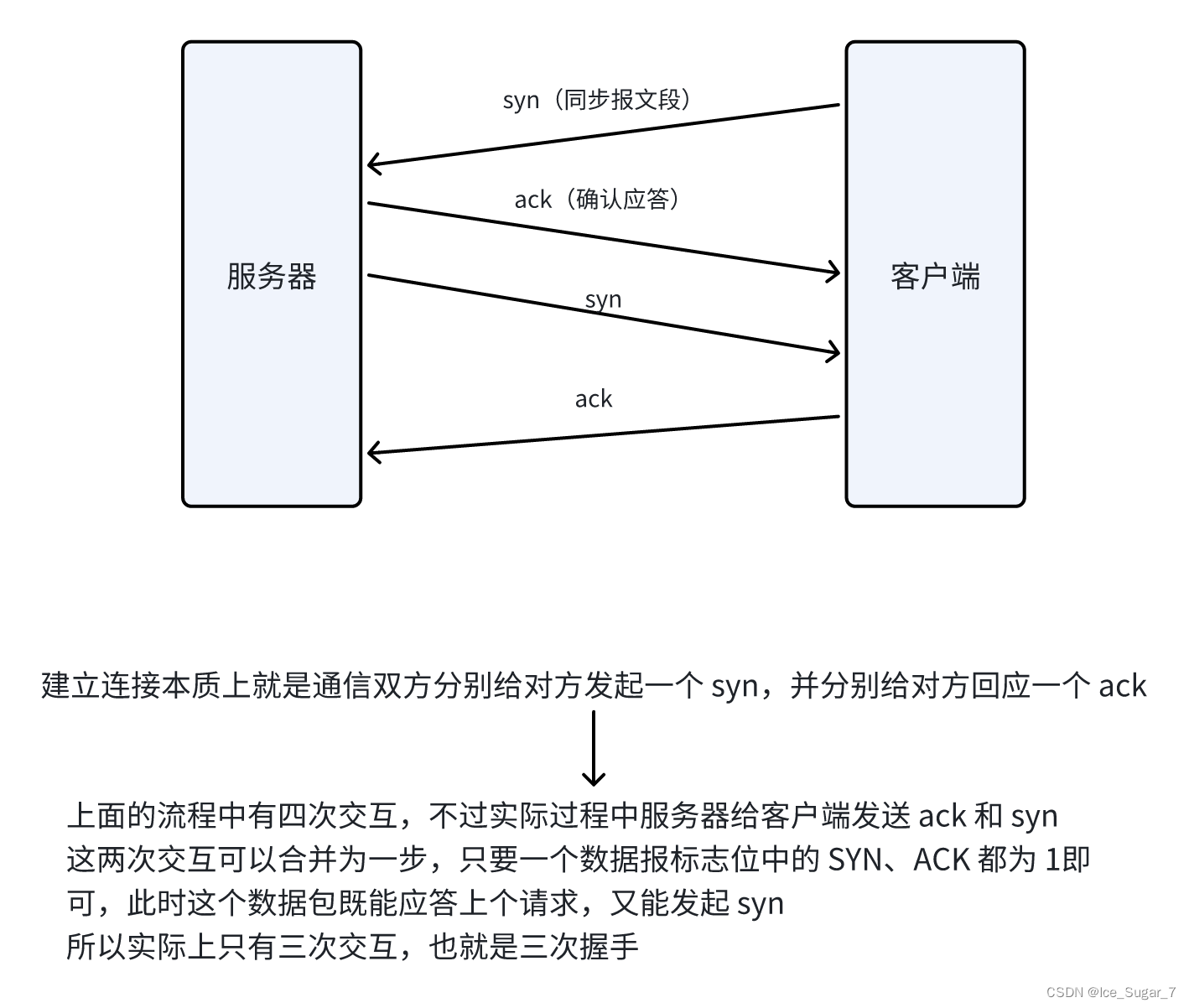
都是通信双方中某一方给对方发起一个 syn/fin,交互过程中中间两个数据报是由同一个机器发出的
不同点:
- 三次握手中间两次可以合并为一次;四次挥手不一定
- 三次握手一定是客户端主动发起连接请求;而四次挥手可以由客户端或服务器发起
🍌TCP 状态转换
前面说 TCP 服务器和客户端都有一定的数据结构保存连接的信息,在数据结构中有个属性叫作状态,操作系统内核根据不同的状态决定应该干什么
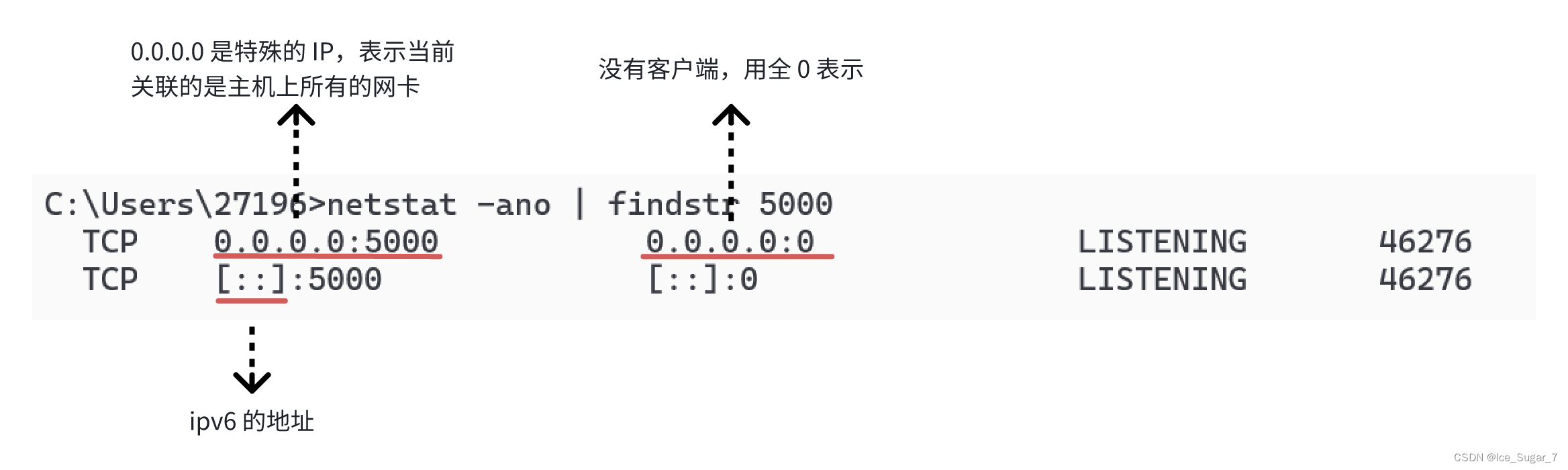
🥝LISTENING 状态
表示服务器创建好 serverSocket,并且绑定好端口号了
设定端口号为 5000,启动服务器后在控制台查询服务器状态,得到如下信息:
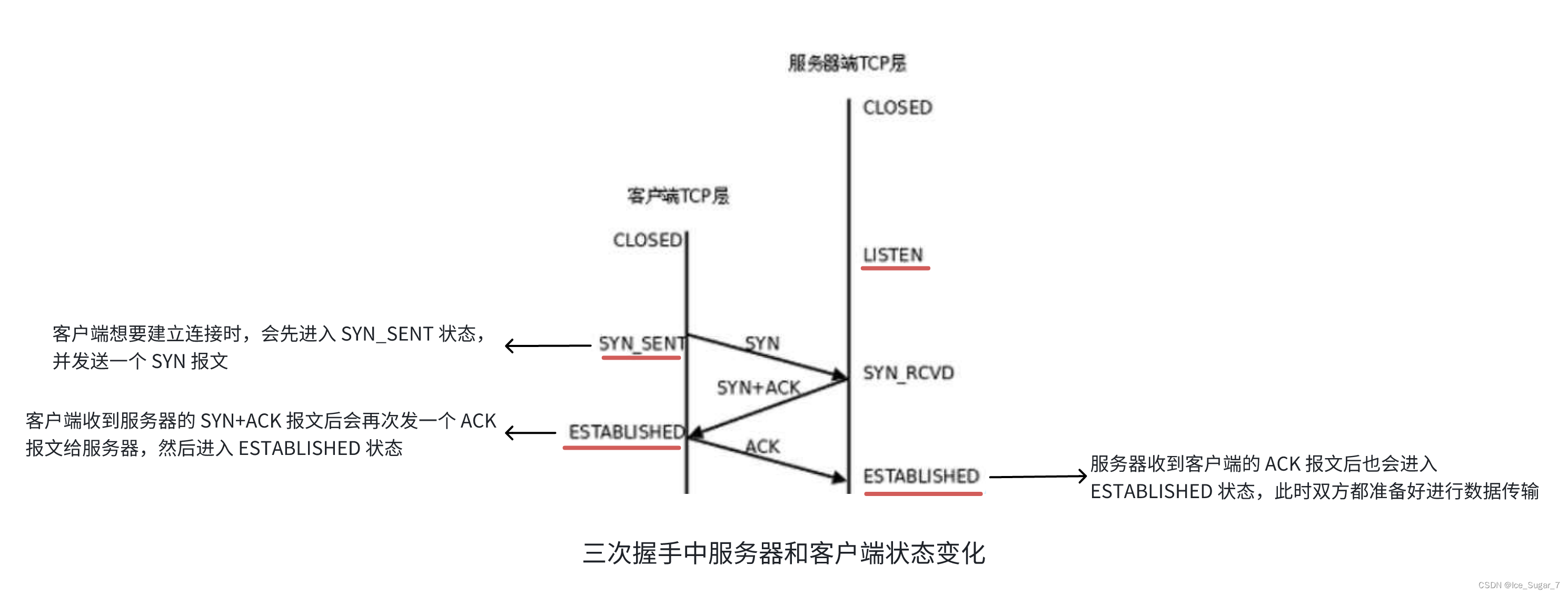
🥝ESTABLISHED 状态
表示客户端和服务器已经建立连接(三次握手结束了)
启动客户端后,再次查询状态:

接下来看一下三次握手中的状态变化
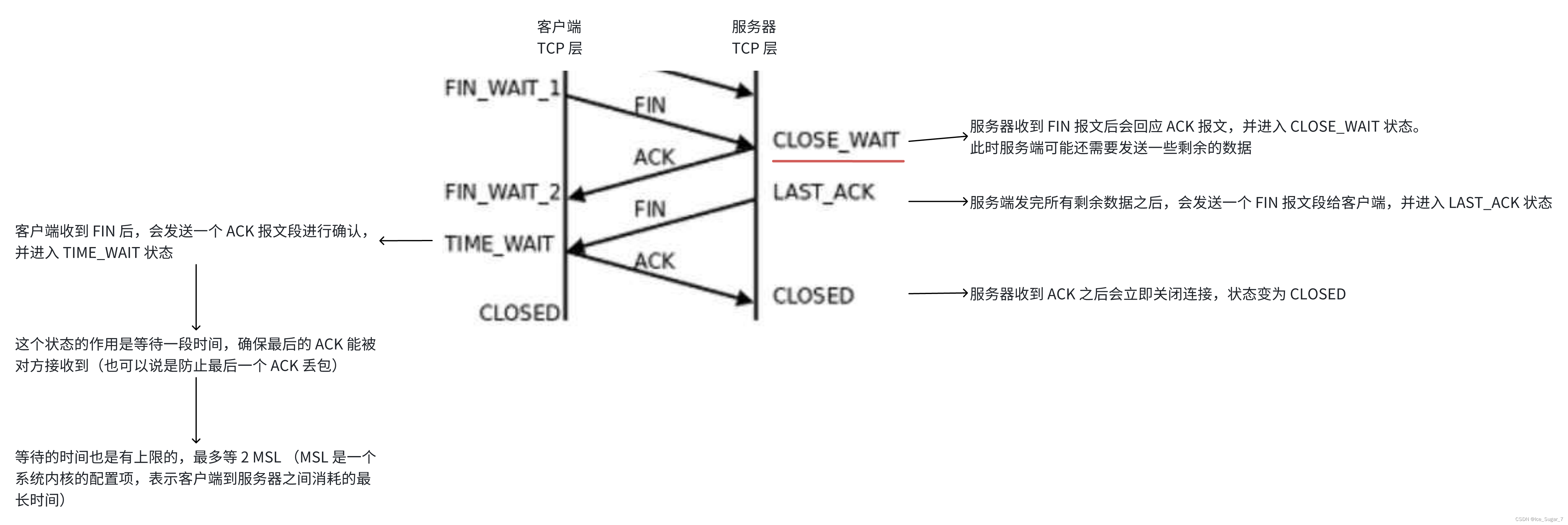
🥝CLOSE_WAIT & TIME_WAIT 状态
前者表示接下来代码中需要调用 close 来主动发起 FIN。收到对方的 FIN 后会进入这个状态
本端给对方发起 FIN 后,对端也给本端发 FIN 之后,本端就会进入 TIME_WAIT 状态
主动断开连接的一端会进入 TIME_WAIT 状态;被动断开的一端则是进入 CLOSE_WAIT 状态
接下来看一下四次挥手中的状态变化,假设是客户端主动断开 TCP 连接
这篇关于「TCP 重要机制」三次握手四次挥手的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






